If you design, build or supply Control & Navigation Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
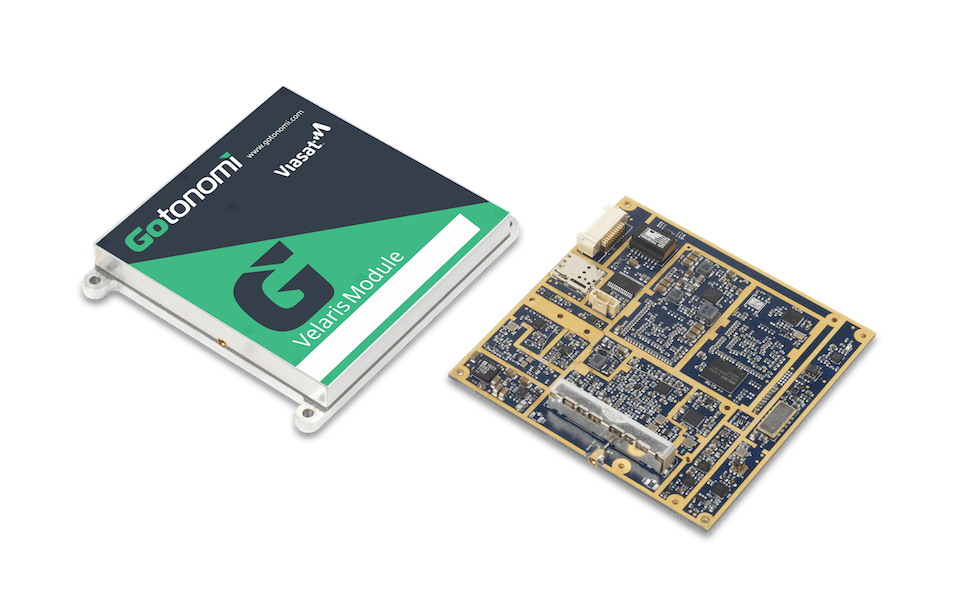
Cutting-edge hardware and software solution for autonomy at scale
Cutting-edge hardware and software solution for autonomy at scale
...tform-agnostic system consists of a hardware kit, software stack and fleet management system, and is... ...ts. AI-powered navigation algorithms then use these inputs to determine the most suitable path and...
......curate motion sensing and orientation data for unmanned systems operating in demanding... ... uninterrupted navigation in arctic cold or desert heat. Typical power draw is just 2.5 W, with a...
Dual-screen ground control station for mission-critical UAS operations
Dual-screen ground control station for mission-critical UAS operations
...-screen Ground Control Station (GCS) designed for operators who require dependable control,... ... switches, and control layouts to meet specific workflow preferences. The dual-screen configuration...
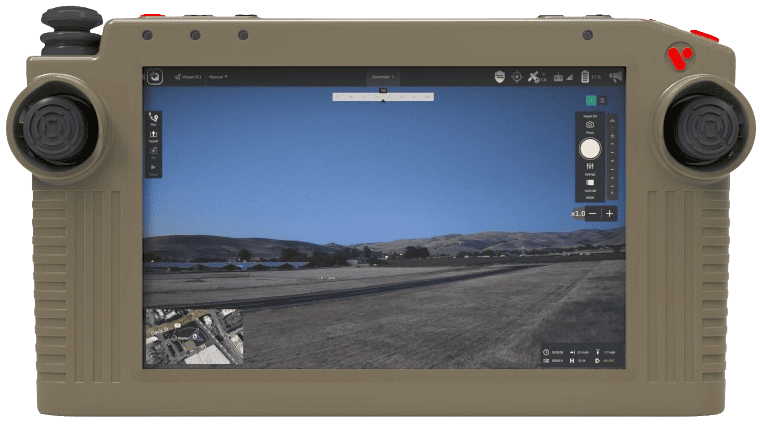
Lightweight & ergonomic operator controller for drones & robotics
Lightweight & ergonomic operator controller for drones & robotics
...eight operator controller built for reliable wired control of drones, robotics platforms, and... ...curate mission control. Configurable LEDs provide status and event-based feedback, while optional...
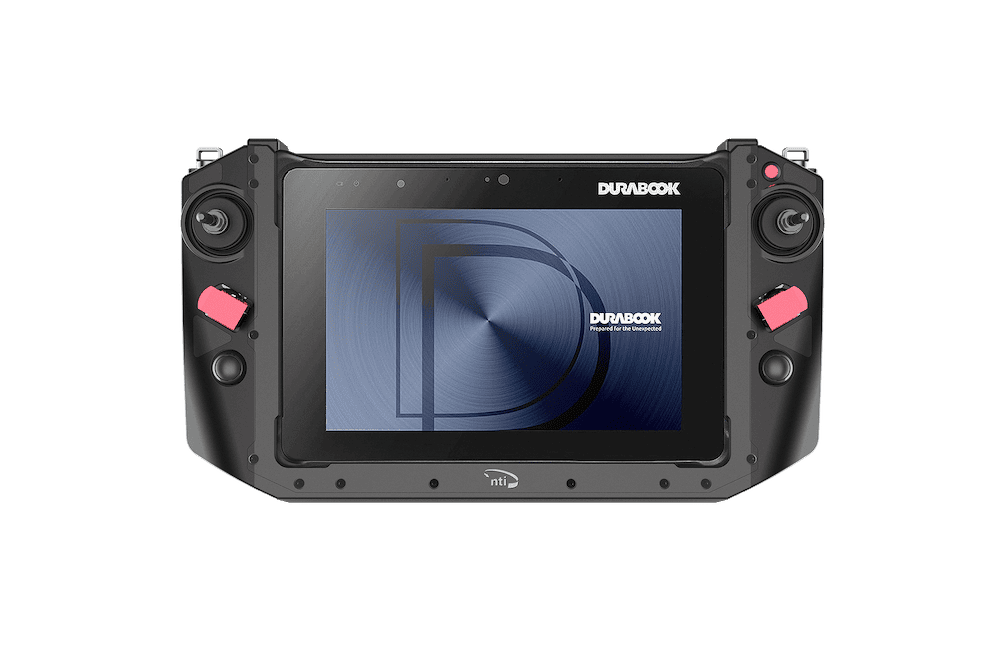
Rugged drone controller powered by 12th Gen Intel® Core™ processors with 11.6″ display
Rugged drone controller powered by 12th Gen Intel® Core™ processors with 11.6″ display
...y ND-11 Ground Control System (GCS) from NTI Systems provides a robust command interface for... ...ms and payload systems. Driven by 12th Gen Intel® Core™ processors, the ND-11 offers the...
Rugged handheld ground control station for secure, long-range UAS operations
Rugged handheld ground control station for secure, long-range UAS operations
...andheld ground control station built for seamless deployment with the IF800 Tomcat and IF1200 UAS... ...nspired Ground Control and third-party applications. Hot-swappable, tool-less battery packs deliver...
This ground control station supports all UAVOS platforms and ground control software and is... ... PGCS.4 ground control station has a new generation powerful Getac X600 PC, an external redundant...
Rugged, compact GCS solution designed to support UAS operations in the most demanding environments
Rugged, compact GCS solution designed to support UAS operations in the most demanding environments
...ortable Ground Control Station delivers unmatched reliability, adaptability, and control, empowering... ... PGCU.3 ground control unit is based around a rugged docking station for a military-grade Getac X500...
...n for unmanned systems operating in demanding environments. Designed for seamless integration with... ...... range of unmanned platforms, ensuring minimal payload impact while maximizing system efficiency....
...ts requiring a controlsystem tailored to exact operational specifications. Its adaptability makes... ...mizable ground control station (GCS) designed to meet the unique demands of UAV and unmanned vehicle...
Next-generation marine navigation technology for smarter and safer vessels
Next-generation marine navigation technology for smarter and safer vessels
...art Autonomous NavigationSystem combines advanced processing with an array of sensor options to... ...The Autonomous NavigationSystem can be tailored to specific autonomy requirements from...
Universal handheld ground control station for UxV operators
Universal handheld ground control station for UxV operators
...ersal handheld controller for UAS and unmanned systems operators, featuring a secure DoD... ...... user authentication and an option for automatic system wipe after failed logins....
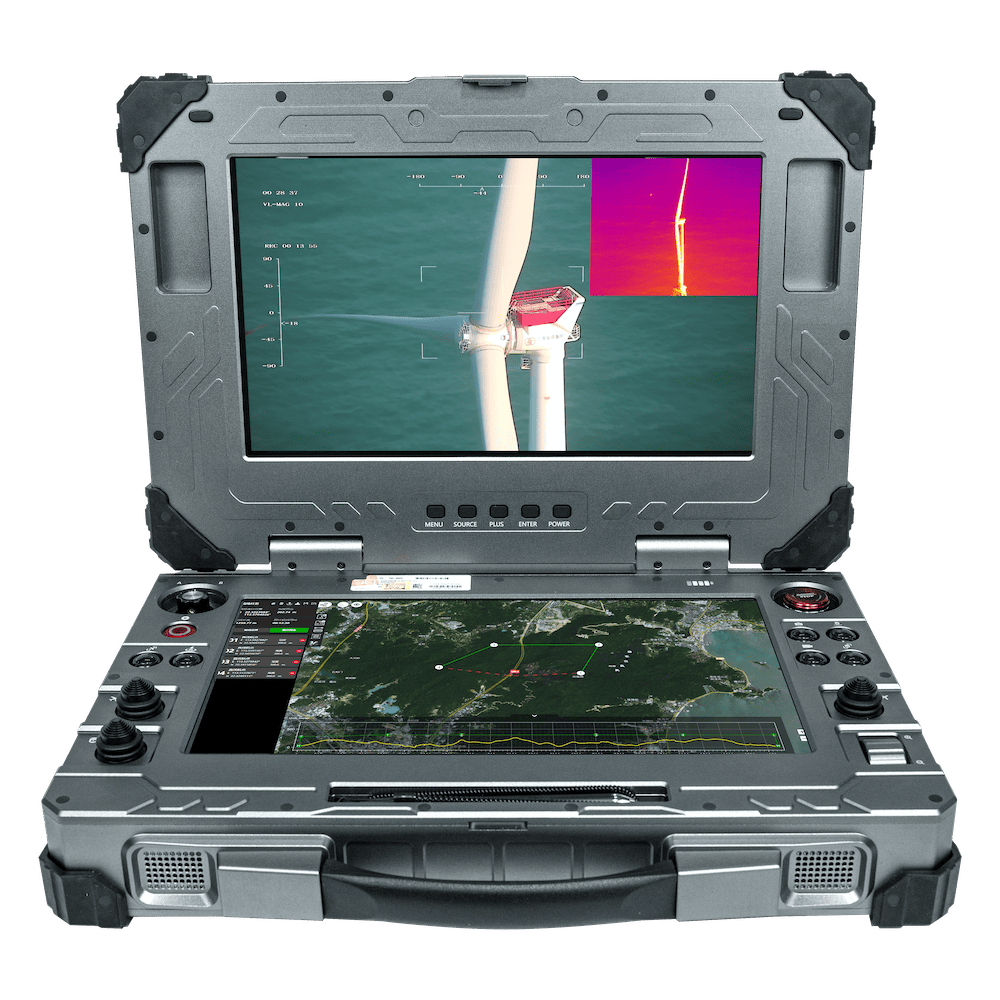
Rugged, military standard command center for unmanned aircraft
Rugged, military standard command center for unmanned aircraft
......
Dual Screen Ground Control Station
Tri-Screen Ground Control Station ...an GCS (Ground control station) is a rugged, military standard command center for unmanned...
Efficient conversion of heavy machinery into teleoperated UGVs
Efficient conversion of heavy machinery into teleoperated UGVs
...uipment Remote Control Retrofit Systems enable excavators, skid steers and other industrial and... ...#8217;s remote control retrofit systems are available for a wide variety of machinery and equipment,...
Tailored flight control systems & software for safe UAV operations
Tailored flight control systems & software for safe UAV operations
...ailored flight control solutions from Ascend Engineering provide customized UAV flight control... ...h a variety of controller and ground control hardware platforms, including Herelink, UXV, H16,...
Ground-based radar system for extended-range UAS airspace awareness
Ground-based radar system for extended-range UAS airspace awareness
... Sight (BVLOS) System is a ground-based airspace monitoring solution built on the proven HARRIER®... ...gurations, the system provides reliable long-range detection exceeding 20 miles, with high...
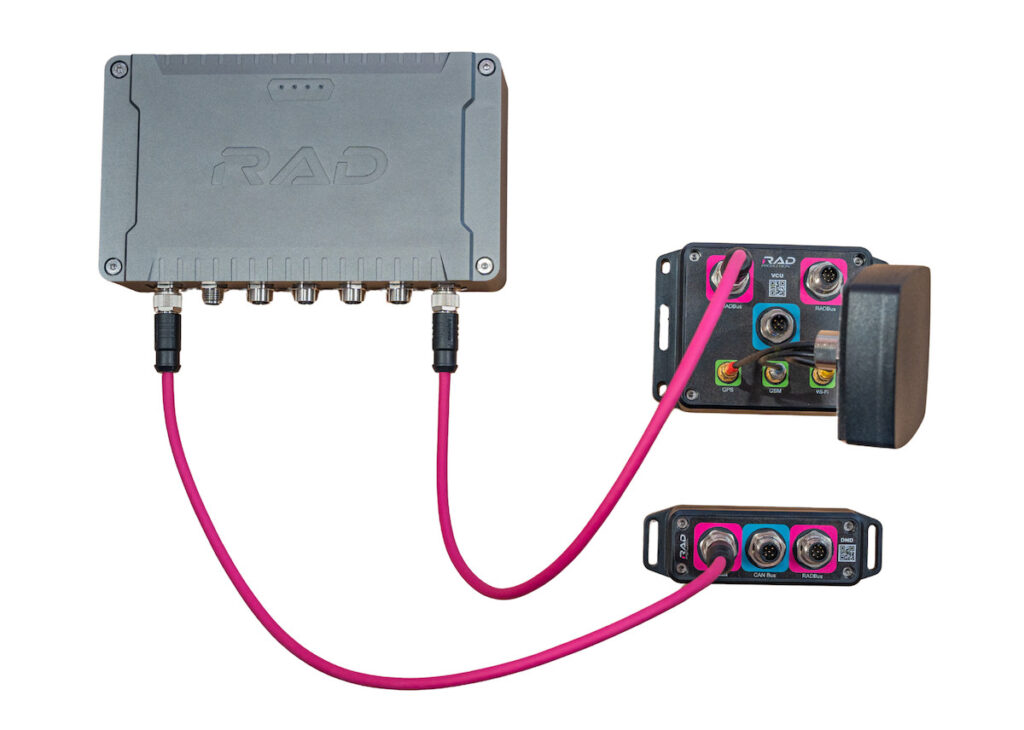
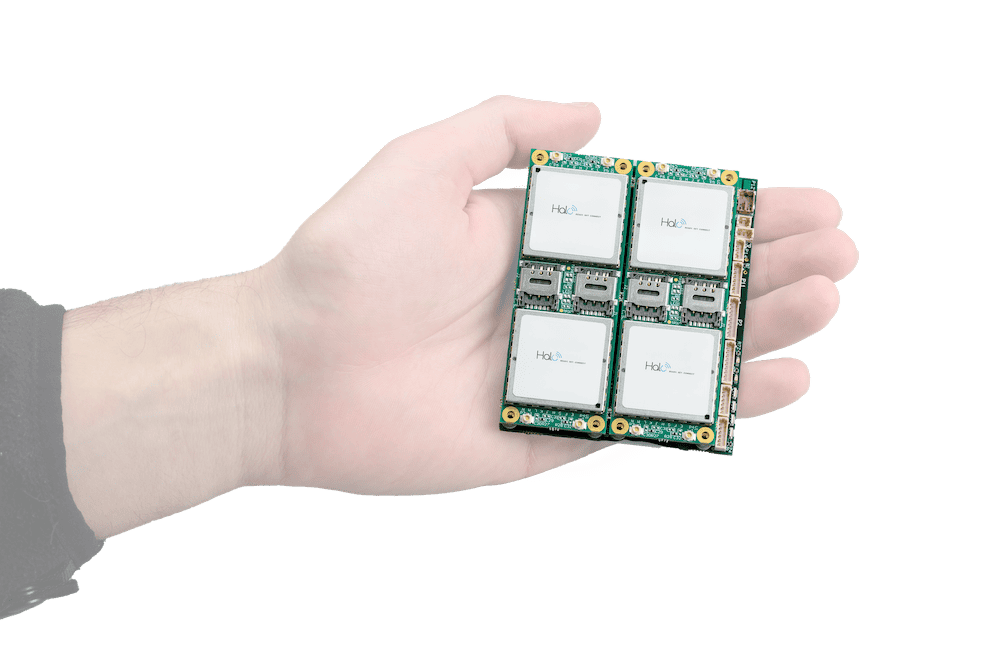
GPS-independent real-time drone positioning system with 200 x 200 x 100 m operational volume
GPS-independent real-time drone positioning system with 200 x 200 x 100 m operational volume
...me positioning system for drones and robotics that utilizes ultra-wideband (UWB) radio technology to... ... and resilient navigation even in urban canyons, indoor locations, and maritime environments. The...
GPS-independent real-time positioning for drones & robotics
GPS-independent real-time positioning for drones & robotics
...me positioning system for drones and robotics that utilizes ultra-wideband (UWB) radio technology to... ... and resilient navigation even in urban canyons, indoor locations, and maritime environments. The...
Ultra-compact Ethernet I/O module with Linux operating system
Ultra-compact Ethernet I/O module with Linux operating system
...a acquisition, control, and SCADA systems. Built on the proven PowerDNA Cube architecture, the... ...an be used for control and diagnostics or teamed for redundancy. It also houses the PowerPC 8347...
Ground control software suite for the C100 multi-mission quadcopter
Ground control software suite for the C100 multi-mission quadcopter
...for the ground control station (GCS), supporting fluid operation on Android tablets, mobile devices,... ...;s streamlined navigation and responsive UI empower operators to rapidly adapt to dynamic mission...
Communications systems & protocols to meet the requirements of vehicle control & telemetry
Communications systems & protocols to meet the requirements of vehicle control & telemetry
...communications systems and protocols to meet the various requirements of vehicle control and... ...e craft remote control applications. These systems are less expensive and more reliable than the...
Control and Navigation Systems in Unmanned Vehicle Applications
Inertial Sense Rugged Miniature INS for control and navigation in UAVs
Control and navigation systems for unmanned vehicles such as UAVs (unmanned aerial vehicles), USVs (unmanned surface vehicles) and UGVs (unmanned ground vehicles) allow the vehicle to be operated autonomously or semi-autonomously, often with the option to switch to full manual control with access to the payloads and sensors of the vehicle. These control and navigation systems may include UAV autopilots, or kits that transform a manned vehicle into an autonomously operating system, for example turning small seagoing vessels into autonomous USVs.
Systron Donner Inertial Tactical Grade IMU for UAV control and navigation
A navigation system for an unmanned or autonomous vehicle will often incorporate a GPS or other GNSS satellite-based navigation aid. GNSS provides a high degree of positioning accuracy in high-signal environments, but requires line of sight of at least four satellites. In order to increase reliability in areas of poor GNSS coverage, the system can be coupled with an Inertial Navigation System (INS), which uses data from MEMS (Micro-Electro-Mechanical) sensors such as gyroscopes, accelerometers and magnetometers to calculate a relative position. Together, the GNSS and INS provide a reliable source of navigation information that can be used by a UAV autopilot or other control system. This data provides inputs to the control loop of the unmanned vehicle, allowing for accurate autonomous operation.Drone Control Systems
The control system of a drone or other autonomous vehicle, including advanced marine control systems, may be programmed to allow it to maintain position, return to a designated location, or follow a planned mission with a series of preset waypoints. It may correct for environmental factors that affect vehicle position, such as tidal activity for USVs and underwater robots, or wind for UAVs.
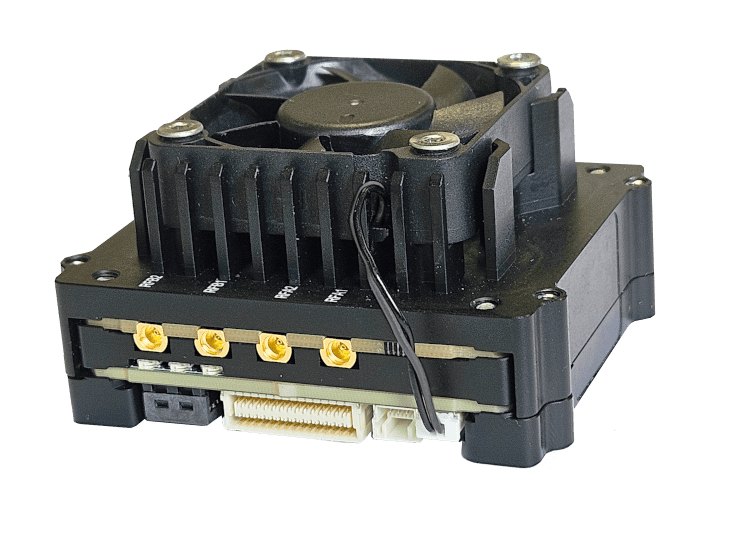
Botlink XRD2 4G LTE drone control for BVLOS operations
Unmanned Navigation Systems – Avoidance and Detection
Navigation systems may also incorporate collision avoidance and detection using LiDAR, ultrasound or machine vision. Automatic Dependent Surveillance-Broadcast (ADS-B), a GPS-reliant system that allows unmanned aircraft to broadcast their position, velocity, and identification information, may also be used to enhance situational awareness and avoid collisions in crowded airspace.
Acecore Technologies has expanded its UAV control solutions with the Signav Pro, offering improved usability, customizable workflows, and variants for commercial, government, and defense users
In this Q&A, Sunhillo explains how ADS-B receiver technology can help UAS operators improve situational awareness during BVLOS missions, supporting UTM, detect-and-avoid, and controlled airspace integration
The Tactien Group considers how utilities and operators can assess current FAA options, identify readiness gaps and prepare for scalable UAS BVLOS operations under a future Part 108 framework
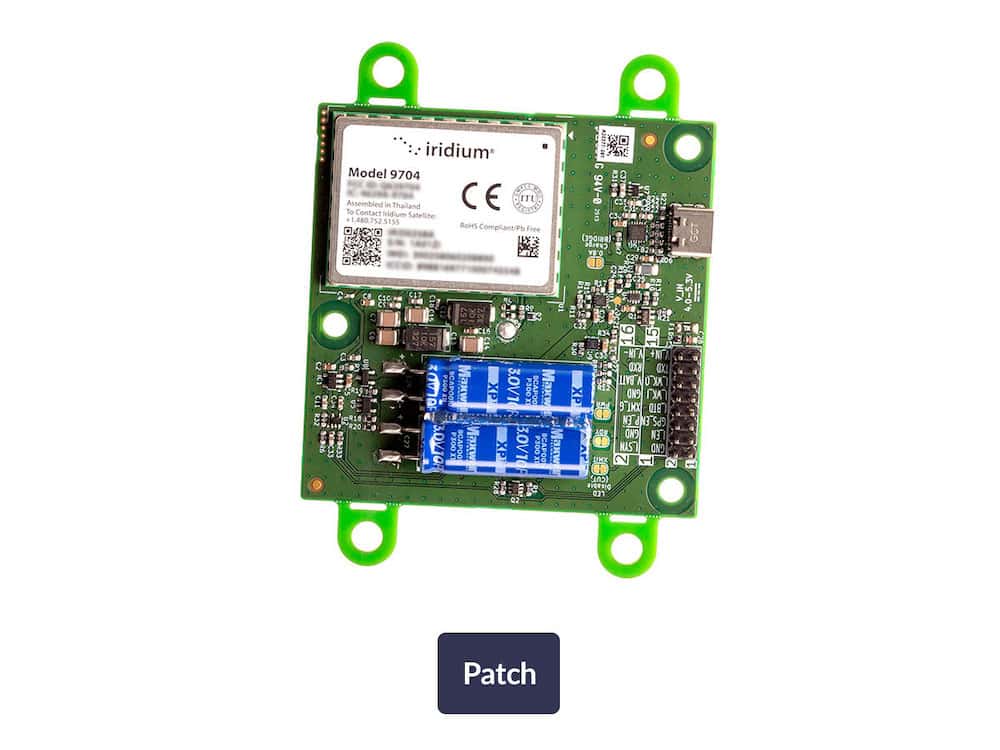
Gotonomi UAV satellite terminal technology supported an ESA Iris RPAS flight trial examining resilient connectivity, UTM integration and safe beyond visual line of sight operations in managed airspace
The US Navy has secured an $18.1 million agreement with Greensea IQ to deliver advanced hardware, software, and engineering services for underwater controllers operating autonomous subsea defense systems
The Northern Plains UAS Test Site in the USA is providing free access to its Vantis infrastructure, enabling operators to launch beyond visual line of sight flights and accelerate advanced unmanned aviation solutions
UXV Technologies’ new SRoC SingleGrip provides compact, one-handed control for unmanned and robotic systems, with modular integration, radio ecosystem support, and Picatinny rail mounting
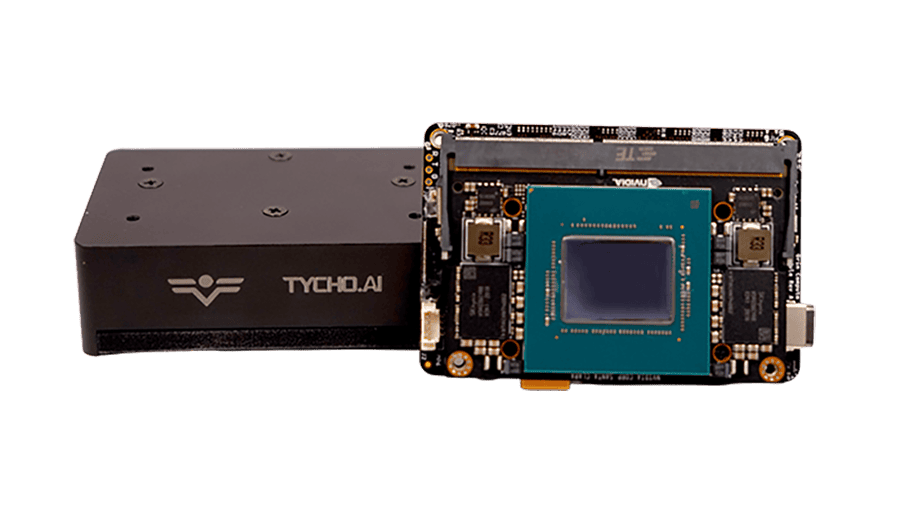
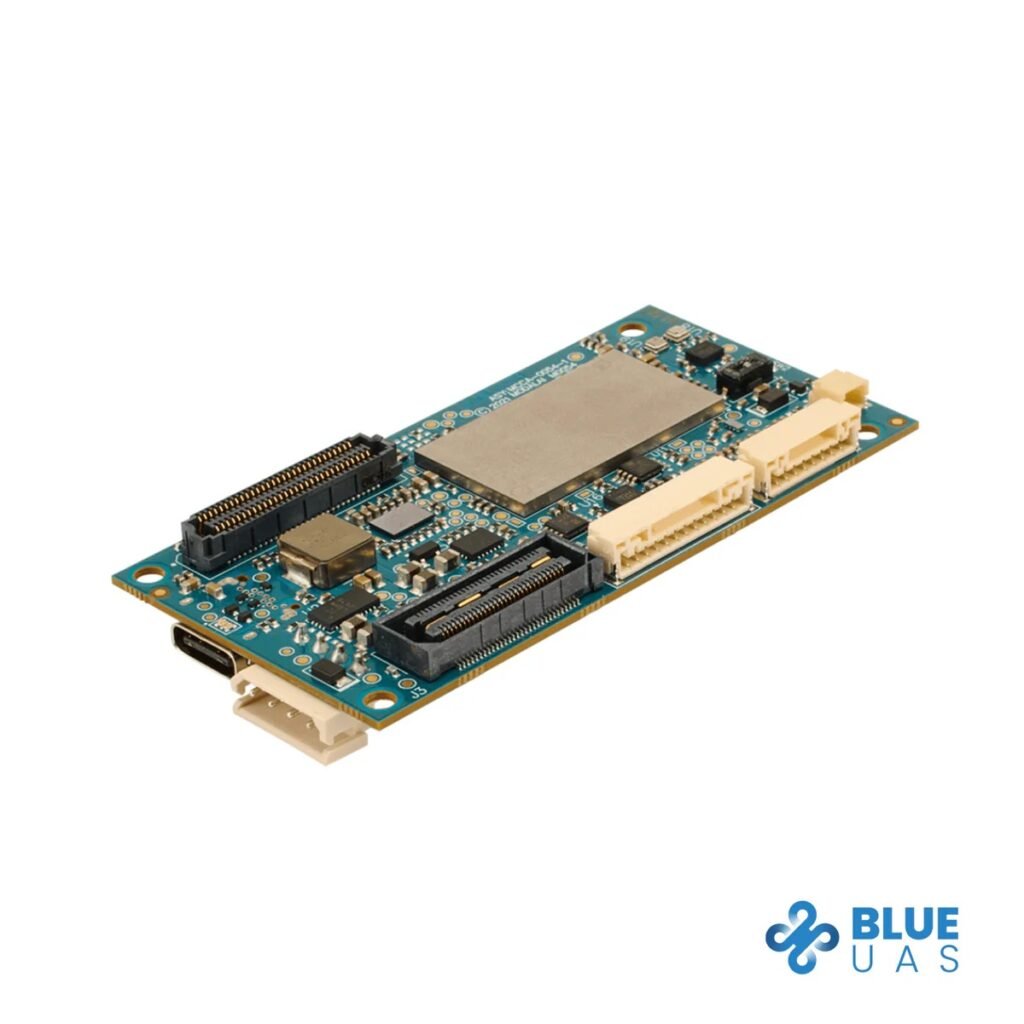
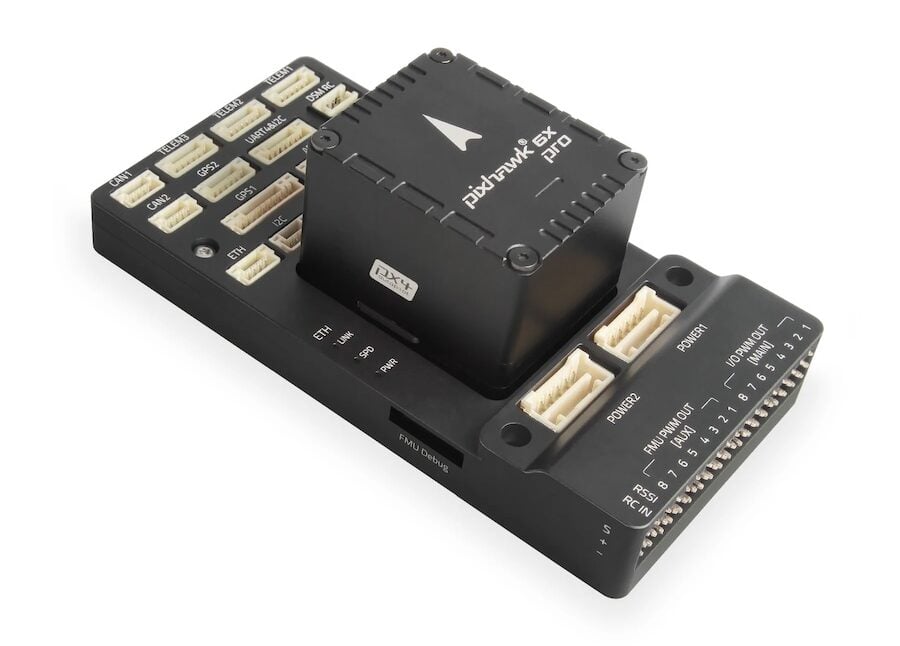
New ARK Jetson PAB V3 Pixhawk Autopilot Bus (PAB) carrier board combines NVIDIA Jetson Orin computing, integrated Ethernet connectivity, and modular flight control integration for AI-enabled autonomous systems
ARK Electronics has unveiled the ARKV6S Flight Controller, a USA-built, NDAA-compliant autopilot solution based on FMUV6X and Pixhawk Autopilot Bus standards
Jun 15, 2026
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.