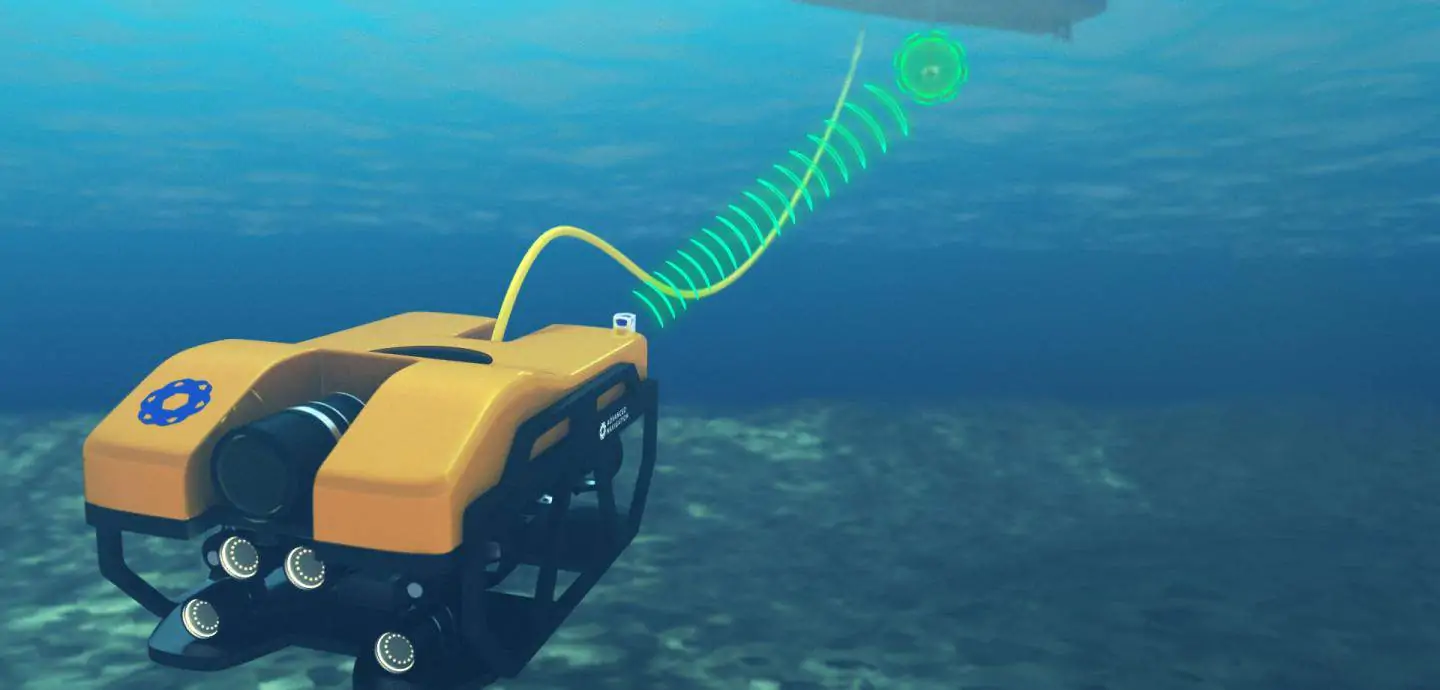
Advanced Navigation is a leading manufacturer of high-accuracy navigation solutions for unmanned and autonomous vehicles operating in GNSS-denied and disrupted environments. The company’s field-proven products are ITAR-free and can be seamlessly integrated into a wide variety of platforms, including UAVs (unmanned aerial vehicles), UGVs (unmanned ground vehicles) and AUVs (autonomous underwater vehicles).
Headquartered in Sydney, Australia, with research and production facilities nationwide and offices around the world, Advanced Navigation has delivered to over 70 countries and more than 2800 clients globally. The company’s vertically integrated manufacturing capabilities ensure fast lead times to market and highly scalable production capacities.