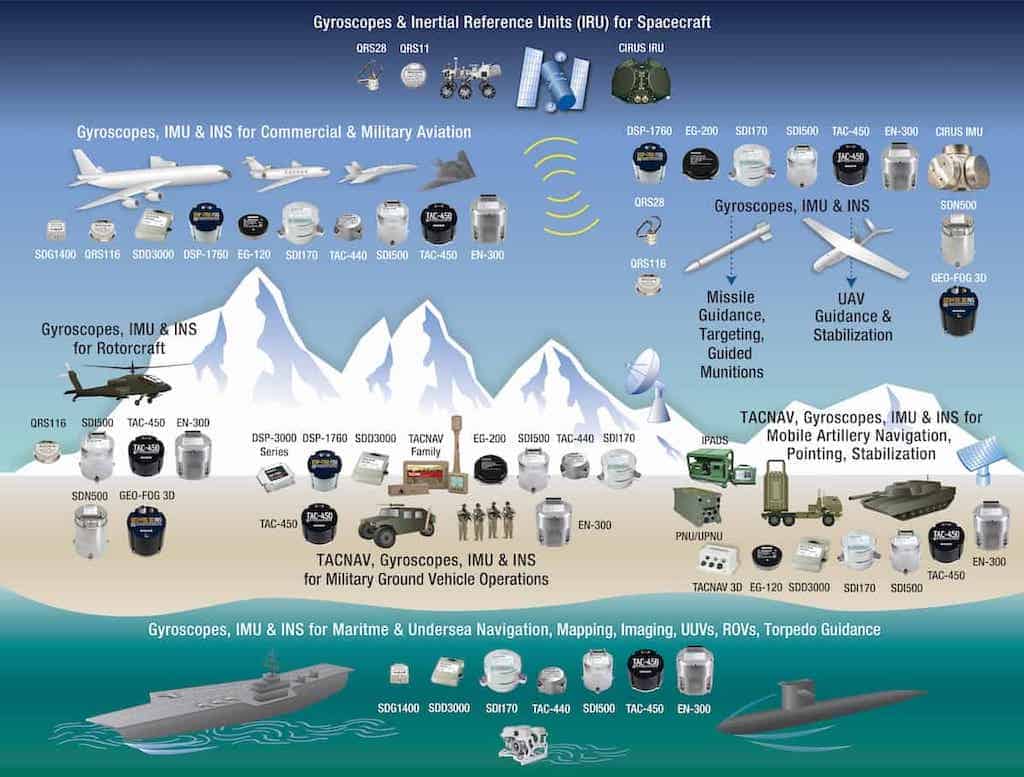
EMCORE Corporation is a leading designer and manufacturer of the world’s highest-performance Fiber Optic Gyro (FOG) and MEMS-based inertial sensors and systems for the Aerospace, Defense and Commercial markets.
As one of the largest independent inertial navigation providers in the industry, we offer a full product suite serving a broad range of requirements across the tactical, navigational, and strategic-grade segments of the unmanned market. Our gyroscopes, IMUs, and Inertial Navigation Systems (INS) provide precise, reliable stabilization, geolocation, guidance, navigation, and control in critical SWaP-conscious applications.