Showcase your capabilities
If you design, build or supply Marine Control Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Source specialist marine control systems for uncrewed marine and maritime platforms from verified suppliers and manufacturers. Marine control systems form the core of command, maneuvering, and automation for unmanned surface vessels and autonomous marine platforms, enabling precise vessel control, safe operations, and integration with higher-level autonomy and mission systems.
Read the Technology Overview
Integrated Electric Propulsion & Vessel Autonomy Solutions for Enabling Autonomous Maritime Operations

Marine Autopilots, Unmanned Surface Vehicle Communications, Power Management Modules & Marine Simulators & Software

If you design, build or supply Marine Control Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Marine control systems manage propulsion, steering, power distribution, and vessel response in unmanned and optionally crewed maritime platforms. These systems are designed to support remote operation, supervisory control, and autonomous behaviors while maintaining reliability in harsh marine environments.
Marine control systems for unmanned platforms emphasize modularity, digital interfaces, and compatibility with autonomy software, navigation sensors, and communications links. They are deployed across defense, commercial, scientific, and industrial missions where endurance, precision, and safety are critical.

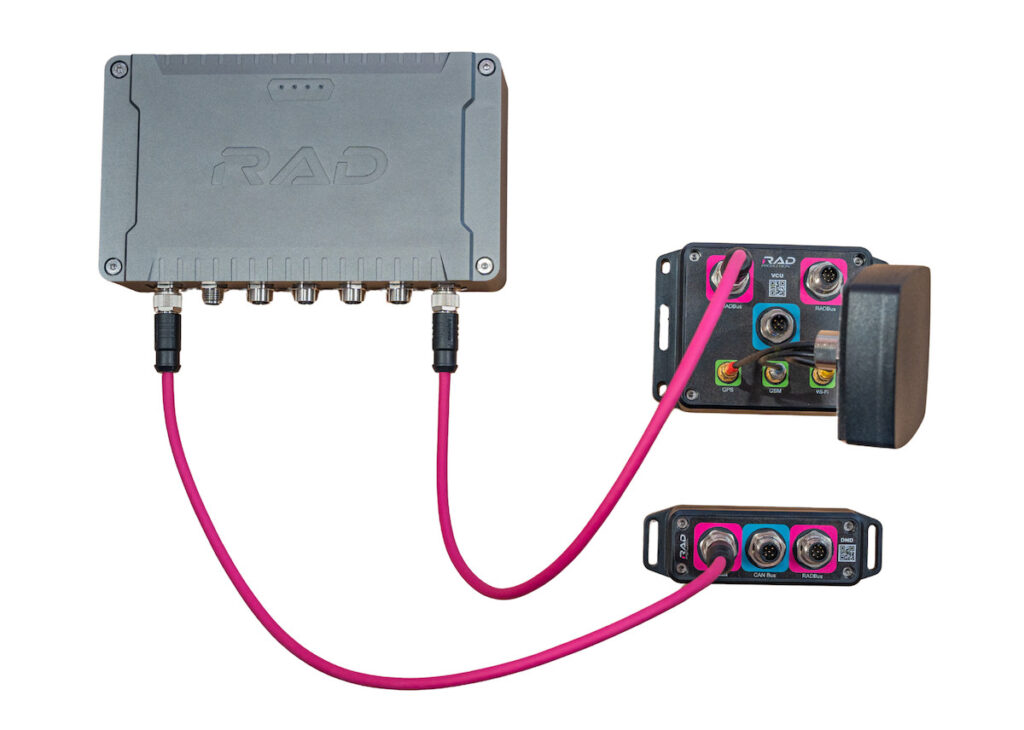
HERMES C3 marine command, control and communications system by ecoSUB Robotics.
Propulsion control systems manage engines, motors, waterjets, or thrusters, converting operator or autonomy commands into controlled thrust. For unmanned platforms, these systems often support electric and hybrid propulsion architectures and provide fine speed resolution at low velocities.
Steering control systems manage rudders, azimuth thrusters, and differential thrust configurations. Advanced systems enable precise low-speed maneuvering and dynamic positioning, supporting complex mission profiles in confined or offshore environments.
Integrated vessel control systems combine propulsion, steering, and auxiliary control into a unified architecture. These systems reduce system complexity and support centralized monitoring, fault management, and interface consistency across multiple vessel subsystems.
ROV control systems integrate vehicle motion control, manipulator operation, camera management, and telemetry handling within a single control framework. These systems link subsea vehicles with surface control stations, enabling real-time operator control and feedback during inspection, intervention, and survey missions.
AUV control systems manage autonomous underwater vehicle behavior without continuous operator input. Functions include depth and speed regulation, trajectory control, mission execution, and energy optimization to support long-endurance subsea operations.
Human-machine interfaces and operator control units provide intuitive command and monitoring tools for unmanned marine platforms. These systems typically incorporate touchscreen displays, joystick controllers, and configurable user interfaces designed to enhance situational awareness and reduce operator workload.
Ground control stations centralize command, monitoring, and data management for unmanned surface and underwater platforms. They support single or multi-vehicle operations and provide a scalable environment for mission supervision, control handover, and system diagnostics.
Mission planning and control software enables operators to define routes, behaviors, and task sequences before deployment. During operations, the software executes mission logic, manages vehicle states, and supports dynamic mission updates.
Sensor and payload control systems manage cameras, sonar, environmental sensors, and specialized mission payloads. These systems coordinate data acquisition with vehicle motion and mission objectives, ensuring synchronized and reliable sensor operation.
Communication and telemetry control systems manage command, control, and data exchange between unmanned platforms and operators. These systems support radio, satellite, and acoustic links, maintaining reliable control and feedback across surface and subsea environments.

Marine Autopilots by Dynautics.
Marine control systems enable propulsion and steering management for unmanned surface vessels operating under remote or autonomous control. These systems translate high-level commands into precise thrust and directional control actions, ensuring stable maneuvering across a wide range of sea states and mission profiles.
In ROV applications, marine control systems manage thrusters, manipulators, cameras, and sensor payloads, allowing operators to conduct precise subsea maneuvering and tool-based tasks during inspection and intervention missions.
Marine control systems support closed-loop control for AUVs, including speed, depth, and trajectory regulation. These capabilities enable autonomous survey, mapping, and data collection missions without continuous operator oversight.
Control systems enable stable platform positioning and vehicle control during offshore inspection, maintenance, and repair operations. Accurate maneuvering and coordinated payload control are essential for subsea infrastructure assessment and intervention tasks.
Marine control systems support hydrographic survey, oceanographic research, and environmental monitoring by maintaining consistent vessel motion and positioning. These capabilities are critical for ensuring data accuracy and repeatability during scientific missions.
In defense environments, marine control systems support unmanned platforms used for patrol, mine countermeasures, surveillance, and force protection. Systems are designed to deliver predictable vehicle behavior and robust control in demanding operational conditions.
Control systems enable persistent unmanned maritime surveillance by integrating propulsion control with navigation, communications, and sensor tasking. These capabilities support extended operations in coastal, port, and border security missions.
Marine control systems enable responsive maneuvering and reliable control of unmanned platforms, supporting maritime search and rescue. Precise low-speed handling and sensor-directed navigation are critical in time-sensitive rescue scenarios.
Marine control systems for unmanned platforms must integrate seamlessly with navigation, communications, payload, and autonomy subsystems. Open architectures and standardized interfaces are increasingly important to enable system upgrades and multi-vendor integration across platform lifecycles.
Environmental robustness is another key consideration. Control systems are engineered to withstand vibration, humidity, salt exposure, and temperature extremes encountered during extended maritime operations. Reliability and maintainability are critical for platforms deployed in environments with no direct human intervention.
Cybersecurity and functional safety are also growing priorities. Control architectures are designed to protect against unauthorized access while ensuring predictable vessel behavior in the event of component faults or communication loss.
Marine control systems for unmanned platforms are often developed in alignment with maritime, defense, and industrial standards. Depending on the application, systems may support compliance with relevant IEC marine electrical standards, classification society guidelines, and defense interoperability frameworks. Adherence to recognized standards supports system safety, certification, and acceptance across international operations.
By enabling precise control, autonomy integration, and reliable vessel behavior, marine control systems remain a foundational technology within Unmanned Systems Technology, supporting the expanding role of unmanned and autonomous maritime platforms across defense, research, and commercial domains.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.