ROV Technology for Inspection, Maintenance & Underwater Operations
Choose from a range of remotely operated vehicles (ROVs) designed for underwater operations across commercial, scientific, and defense environments. Find specialized suppliers and manufacturers supporting subsea inspection, intervention, monitoring, and research missions.
If you design, build or supply Remotely Operated Vehicles (ROV), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
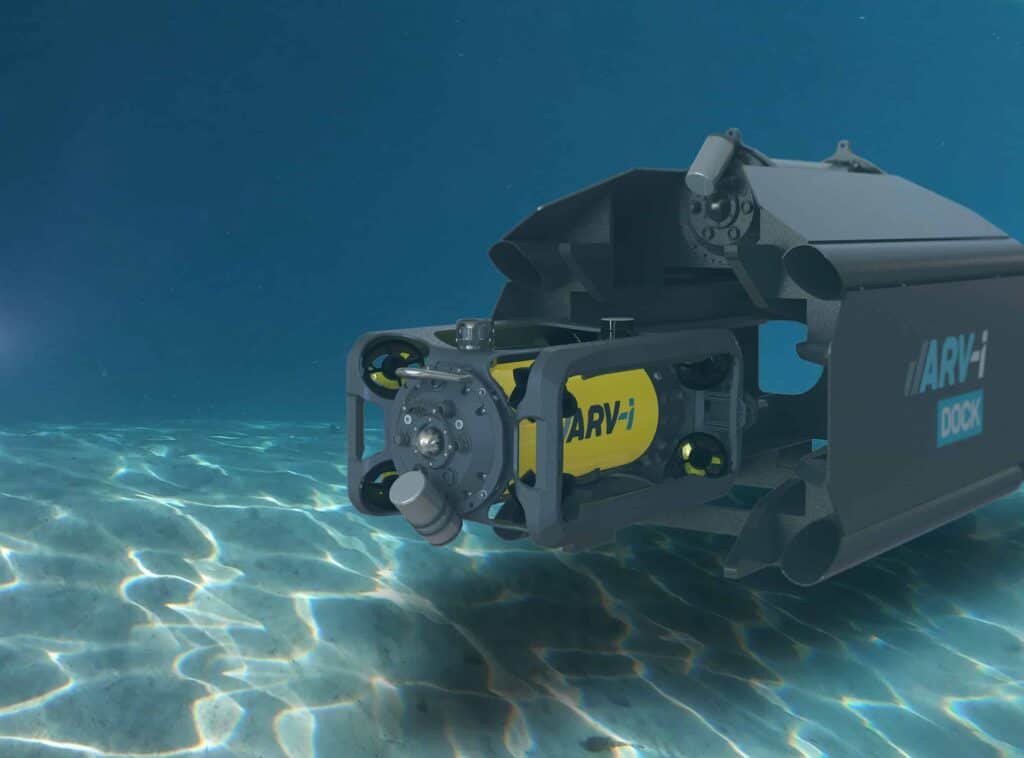
...the autonomous underwater drone revolutionising underwater data collection by eliminating the... ...L and INS, the underwater robotic vehicle is capable of carrying out missions in challenging subsea...
The ultimate portable and toughest micro ROV on the market.
The ultimate portable and toughest micro ROV on the market.
...oughest little ROV on the market. Powered by six thrusters, engineered with aluminium and carbon... ...ican case, the ROV is easily portable. The battery tube is certified for both passenger and cargo...
Intelligent and advanced capabilities for underwater surveys
Intelligent and advanced capabilities for underwater surveys
...ion-class mini ROV designed for quick deployment and low-maintenanceoperation. Fitting completely... ...ervation class ROV, designed for quick deployment and reliable underwater surveys....
Mission ready with advanced stabilization and payload capabilities.
Mission ready with advanced stabilization and payload capabilities.
...t and flexible underwater capabilities for complex deep ocean missions. It consists of six thrusters... The ROV is powered by lithium-ion batteries that are easily interchangeable with the spare batteries...
ROV Technology for Inspection, Maintenance & Underwater Operations
Overview by
Summer James
Updated:
Remotely Operated Vehicles (ROVs) are tethered underwater robots used across offshore energy, marine science, infrastructure inspection, and defense. Although many vehicles can be configured for multiple roles, the industry generally categorizes ROVs in two ways:
By class – based on size, capability, and power.
By application – based on the mission they’re equipped to perform.
Understanding both perspectives helps engineers, operators, and project teams choose the right vehicle for the task.
SRV-8 MDV by Oceanbotics
ROV Types by Class
Mini ROVs
Also known as: Micro ROVs, Small ROVs, Eyeball-class ROVs
Mini ROVs are compact, portable systems designed primarily for visual inspection in confined, shallow, or low-risk environments. They are often operated from small vessels, pontoons, or even shore-based locations and can be deployed quickly with minimal crew and infrastructure. Payload options are typically limited to cameras, lights, and basic sonar. Still, their low cost and ease of use make them popular for inland waterways, aquaculture, basic hull checks, and rapid assessments.
Observation-class ROVs
Also known as: Observation ROVs, Inspection ROVs, Inspection-class ROVs, Survey-class ROVs
Inspection ROVs occupy the middle tier of capability. They are larger and more potent than mini systems, offering better stability, higher-quality imaging, and the ability to integrate sensors such as multibeam sonar, laser scanners, and positioning aids.
They are widely used for structural inspections, environmental monitoring, and survey tasks that require detailed situational awareness but do not require heavy intervention tools. Survey-configured variants may support metrology, seabed mapping, or bathymetric work.
Work-class ROVs
Work-class vehicles are built for demanding offshore missions where payload capacity, stability, and power are critical. They operate at greater depths, support multiple manipulators, and integrate advanced control systems and heavy tooling. Advanced buoyancy modules, often based on depth-rated syntactic foam, are used to maintain neutral buoyancy and vehicle stability while accommodating heavy tooling and sensor payloads.
Light Work-class ROVs
Also known as: Utility ROVs, Medium-duty ROVs
Light work-class platforms bridge the gap between inspection and full intervention vehicles. They offer more thrust, improved payload options, and limited tooling capability, making them suitable for general utility work, light construction support, and more complex inspections.
Heavy Work-class ROVs
Also known as: Heavy-duty work ROVs, Construction-class ROVs
Heavy work-class systems are designed for intervention and construction in deep and harsh offshore environments. They routinely carry dual manipulators, hydraulic tools, cutting systems, torque tools, and specialist subsea interfaces. These vehicles are standard in oil and gas, offshore wind, and subsea construction programs.
ROV Types by Application
While class describes the platform, the application describes the mission configuration. A single vehicle can often serve multiple roles by swapping payloads and tools.
Deep Trekker’s REVOLUTION Remotely Operated Vehicle
Intervention ROVs
Configured to interact physically with subsea equipment — operating valves, inserting tools, connecting hoses, and supporting repairs. Commonly fitted with manipulators, torque tools, and hydraulic interfaces.
Construction ROVs
Support installation and commissioning of subsea structures, assisting crane operations, guiding placements, monitoring alignment, and performing final checks.
IRM ROVs (Inspection, Repair & Maintenance)
Optimize long-term asset integrity tasks. They combine high-quality inspection tools with manipulators and the capability for light intervention.
Trenching ROVs
Purpose-built for cutting or fluidizing seabed material to create trenches for cables and pipelines. Often equipped with jetting or mechanical cutting systems.
Cable / Pipeline Burial ROVs
Specialized vehicles that reposition or bury assets after installation. They may follow a laid route and ensure a compliant burial depth for protection.
Towed ROVs
Hydrodynamic vehicles are pulled behind a vessel. Ideal for wide-area sonar and imaging surveys where endurance and coverage take priority over maneuverability.
Deep-water / Ultra-deep ROVs
Engineered for extreme depth and pressure environments. These systems focus on reliability, redundancy, and specialized materials to enable scientific exploration and deep-ocean industrial work.
Science / Research ROVs
Configured for sampling, habitat observation, and oceanographic measurements. Typically include scientific sensors, sampling baskets, and precise station-keeping.
VideoRay’s compact Mission Specialist Ally ROV
Aquaculture ROVs
Aquaculture ROVs are used to monitor, inspect, and maintain fish-farming infrastructure, including nets, cages, moorings, and feeding systems. They help operators assess stock health, detect damage or biofouling, and verify mooring integrity without the cost and risk of diver intervention. Many aquaculture-focused ROVs prioritize maneuverability, portability, and camera quality, making them well-suited for daily farm operations and routine compliance inspections.
Salvage ROVs
Used for search, recovery, and forensic assessment of wrecks or lost equipment. Often integrate grab tools, lifting aids, and high-detail imaging.
Pipeline Inspection ROVs
Outfitted with sonar, cameras, lasers, and tracking tools to follow, document, and assess the condition of subsea pipelines.
Cable Inspection ROVs
Similar to pipeline inspection systems but optimized for fiber-optic and power cables, including fault localization and burial verification.
Nuclear Inspection ROVs
Designed for reactor pools and contaminated environments. Emphasize radiation-tolerant materials, compact size, and precise control.
Military / Mine Countermeasure (MCM) ROVs
Support naval missions, including mine detection, investigation, and neutralization, often in hazardous or shallow environments where divers cannot operate.
Port Security ROVs
Port Security ROVs support maritime law enforcement and harbor authorities by enabling rapid underwater investigation in busy, confined, and low-visibility environments. They are used to inspect vessel hulls, piers, and quay walls for hazards, contraband, and structural issues without disrupting port operations or putting divers at risk. These systems often integrate imaging sonar, high-definition cameras, and optional manipulator tools to document findings and support incident response.
EOD ROVs
Explosive Ordnance Disposal vehicles adapted for underwater tasks, enabling remote assessment and safe handling of unexploded ordnance.
Penstock / Intake / Tunnel Inspection ROVs
Operate inside intake tunnels, penstocks, and long conduits with limited visibility and constrained maneuvering space.
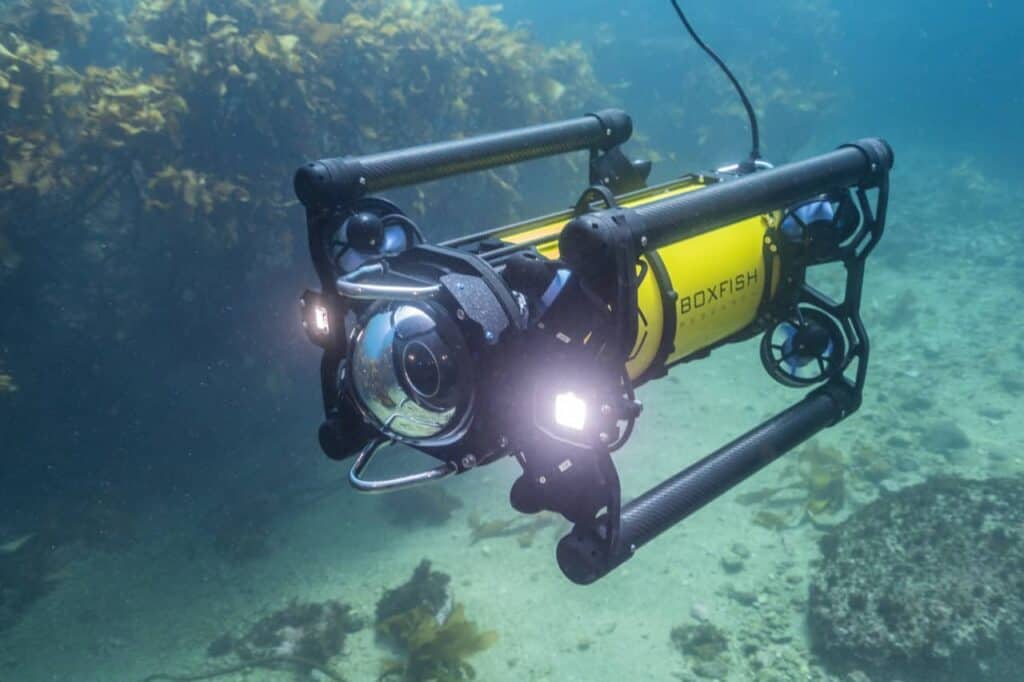
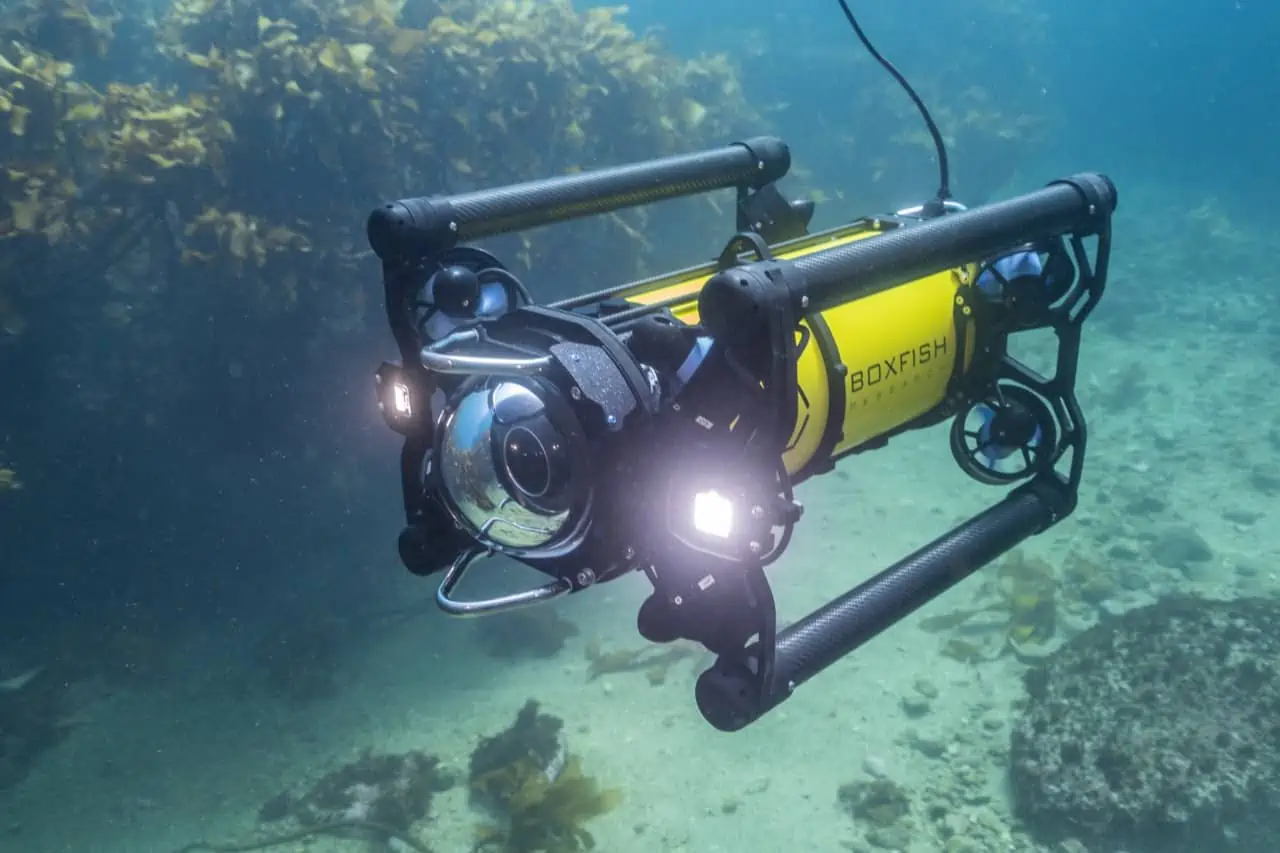
Boxfish ROV by Boxfish Robotics
Hybrid ROV/AUV Systems
Combine tethered operation with autonomous modes. They can perform extended surveys as AUVs, then reconnect or operate tethered for intervention.
Resident ROVs
Remain docked subsea for weeks or months, ready for on-demand deployment. Ideal for facilities requiring frequent inspections without repeated vessel mobilization.
Free-swimming ROVs (extended-excursion)
Operate with long tethers or TMS systems, allowing significant lateral range from the deployment point.
TMS-deployed ROVs (cage-launched)
Launched within a tether management system (TMS), improving handling in deep water and harsh currents while protecting the primary umbilical.
Launch and Recovery Systems (LARS) Deployment
Launch and Recovery Systems (LARS) are purpose-built handling systems that deploy and retrieve ROVs safely in varying sea states. Typical setups include A-frames, cranes, winches, and guided docking systems that stabilize the vehicle as it enters or leaves the water. LARS units are often integrated with tether management systems (TMS) to protect the umbilical and reduce loads on the vehicle, improving safety, repeatability, and operational uptime during offshore missions.
Standards And Integration Considerations
Underwater ROV deployment is influenced by industry standards and best practices related to electrical safety, pressure testing, electromagnetic compatibility, and environmental protection. In defense and government programs, alignment with relevant military and maritime specifications supports interoperability and operational assurance. For commercial and research users, adherence to recognized subsea standards supports safe operations, system longevity, and regulatory compliance across diverse operating environments.
As underwater operations continue to expand across energy, defense, infrastructure, and scientific domains, remotely operated vehicles remain a foundational capability within the broader unmanned underwater systems ecosystem.
In this case study, Boxfish Robotics’ ROV helped Deep Dive Division inspect a 163-meter tunnel using imaging sonar, pipe profiling sonar, and 3D modeling
Boxfish Robotics is developing a dedicated underwater robotic platform for a Great Lakes documentary, supporting imaging operations in complex freshwater environments
Project REPARE leverages advanced Deep Trekker ROV technology and aerial photogrammetry to restore native flat oyster populations in Southern Brittany through comprehensive underwater monitoring and assessment
A two-day Aquatic Incident Management Systems training program in South Lake Tahoe, supported by Deep Trekker, provides hands-on instruction in sonar, remotely operated vehicles, and coordinated aquatic search operations
Deep Trekker highlights how Franmarine deploys its ROVs alongside the MarineStream software platform to deliver standardized in-water hull inspections, biofouling management, and UWILD workflows
Apr 01, 2026
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.