verifiedThis business has been claimed by Boxfish Robotics and verified by UST.Verified companies work with us to ensure we display the most up-to-date and comprehensive product information, articles and other material to help you choose the right solution for your requirements.
Underwater Robotic Vehicles (ROV & AUV) for Inspections, Observation and Videography New Zealand
Underwater Robotic Vehicles (ROV & AUV) for Inspections, Observation and Videography
Boxfish Robotics, a New Zealand-based underwater robotics manufacturer, is dedicated to leading the underwater robotics revolution by continuously innovating. Our solutions capture the secrets of the underwater world with unprecedented clarity.
We are experts in the design and manufacture of cutting-edge remotely operated vehicles (ROVs) and hovering autonomous underwater vehicles (HAUVs) that empower humans to explore, understand, and work within the underwater world. Our pioneering technology excels in challenging conditions, serving a wide range of industries, including submerged asset inspection, marine science, scientific expeditions, offshore energy, aquaculture, biosecurity, and cinematography.
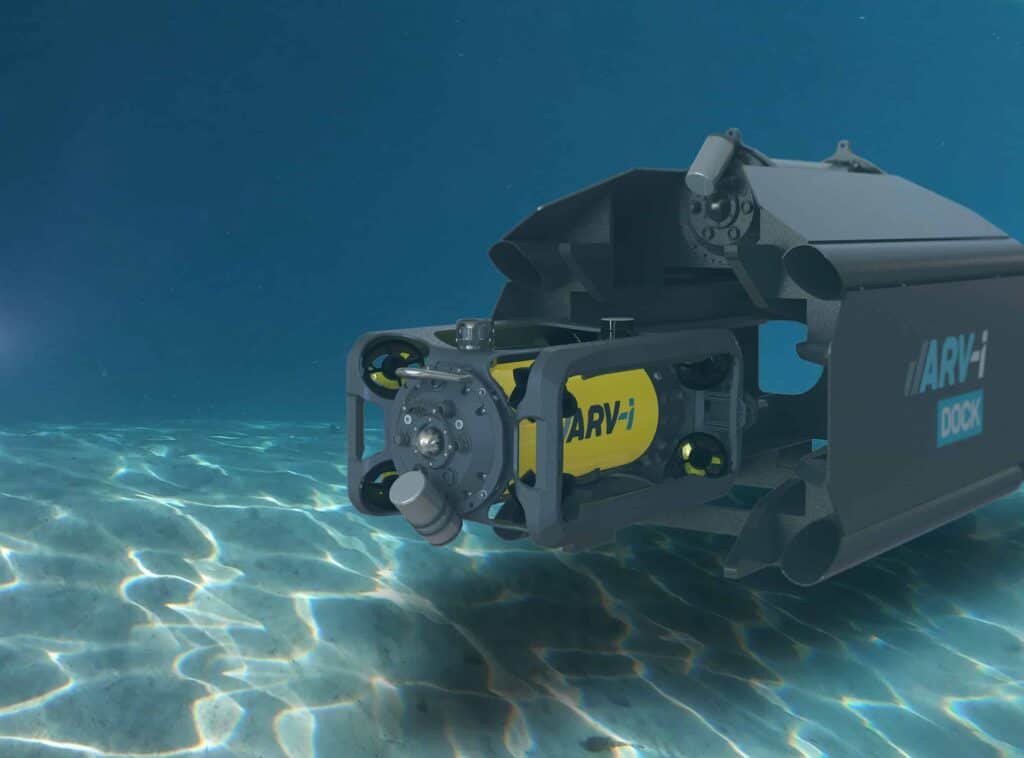
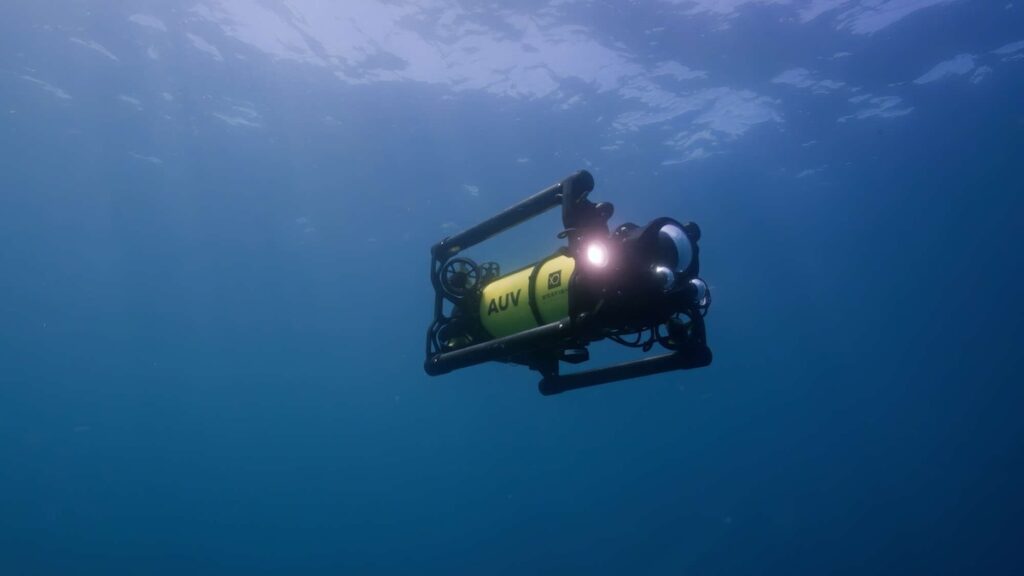
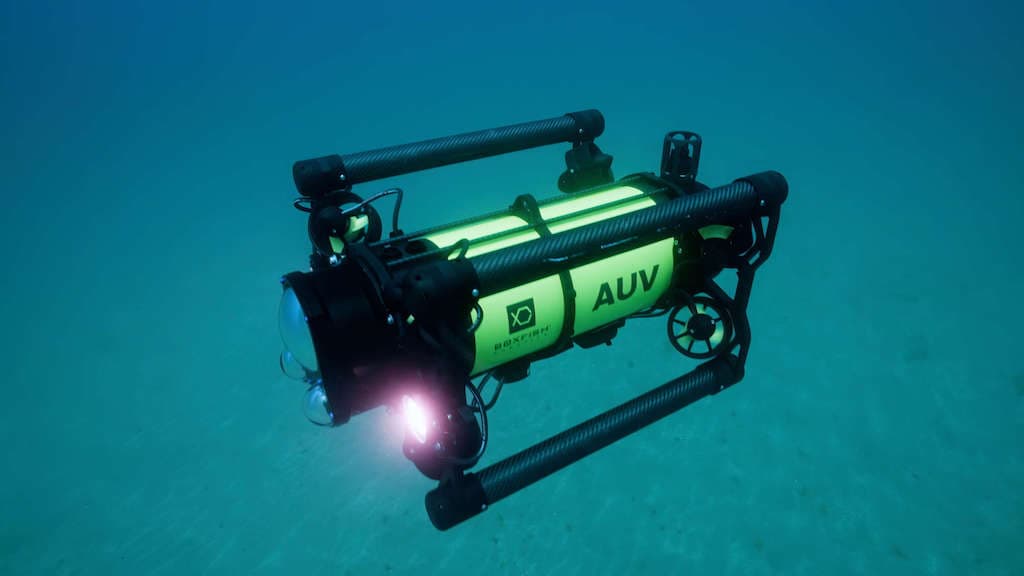
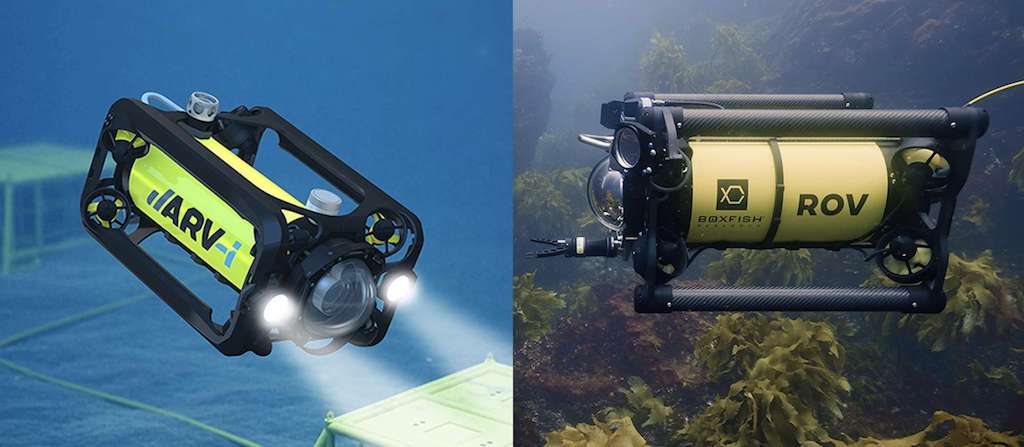
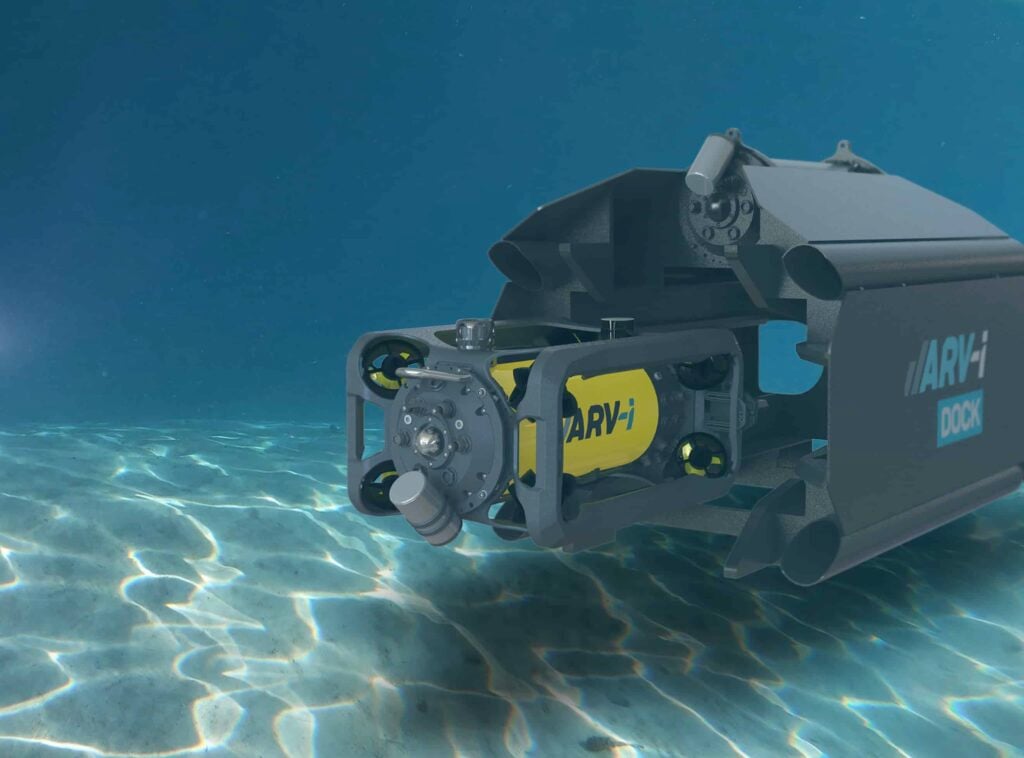
ARV-i – Autonomous Underwater Vehicle
Resident AUV for long-duration inspections & monitoring
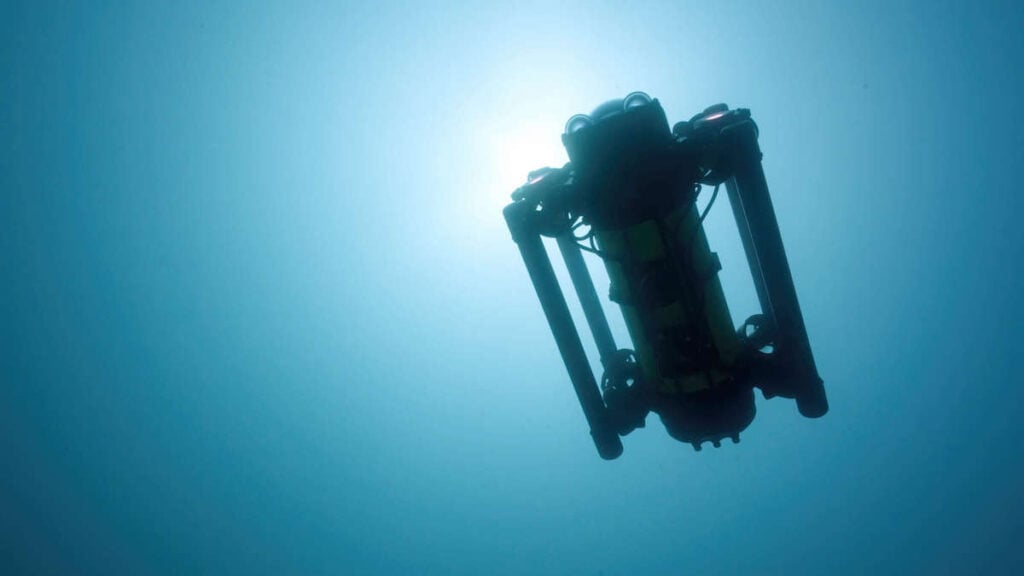
Designed in collaboration with Transmark Subsea, the ARV-i is a resident AUV developed specifically for the persistent monitoring of underwater assets. With the ability to stay underwater for up to 12 months at a time, it is ideal for offshore energy installations, oil and gas platforms, wind farms, aquaculture and fisheries.
Designed for fully autonomous operation, the vehicle uses a combination of pre-programmed information and AI capabilities to locate and observe underwater assets. It can automatically return to its docking station when required for wireless battery charging and transfer of collected data.
The vehicle can also be manually piloted from anywhere in the world using wireless or fixed IP connections through 4G/Internet tether extension adapters. Tethered options are available for applications requiring uncompressed 4K video stream or higher-rate data transmission.
Advanced submersible ROV for professional underwater cinematographers
The Boxfish Luna is an advanced video ROV for professional cinematographers, delivering 8K video and 50MP image capture at depths of up to 1000 metres.
With a choice of Sony A7SIII or Sony α1 cameras, and a new 200mm precision optical dome, the Boxfish Luna allows filmmakers to easily capture underwater environments with unparalleled detail and clarity.
Eight 3D-vectored thrusters and six degrees of freedom allow the ROV to orient itself in any direction. Fine control, active stabilisation and ultra-precise movements let the operator achieve steady shots with ease.
The 4K UHD 17-inch Boxfish Console provides convenient video monitoring and communications from the surface. Users have full control of vehicle positioning and camera parameters such as exposure, white balance, zoom and lighting.
The Boxfish Luna can be easily set up and deployed by a two-person crew in just minutes. The subsea ROV can hover 15 hours per battery charge, with actual run time dependent on operational conditions, and can be charged in the field with an optional power pack or via a boat power socket.
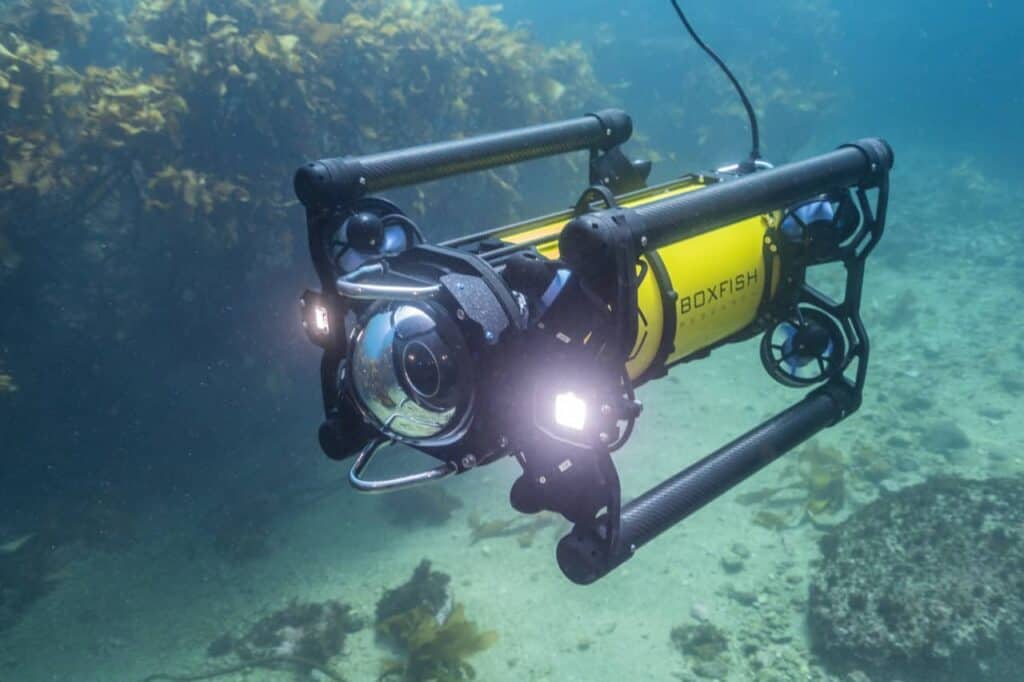
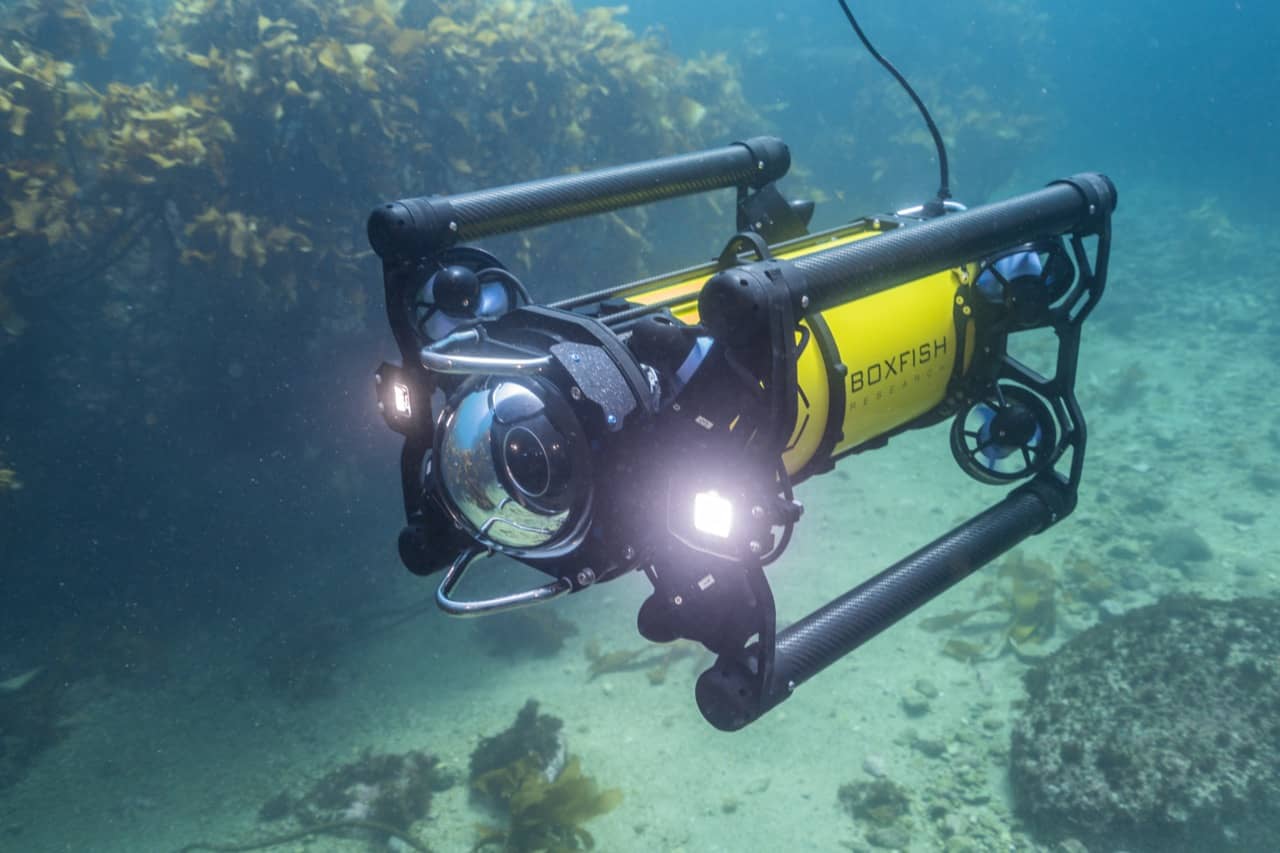
Professional ROV for underwater inspections, observation and remote expeditions
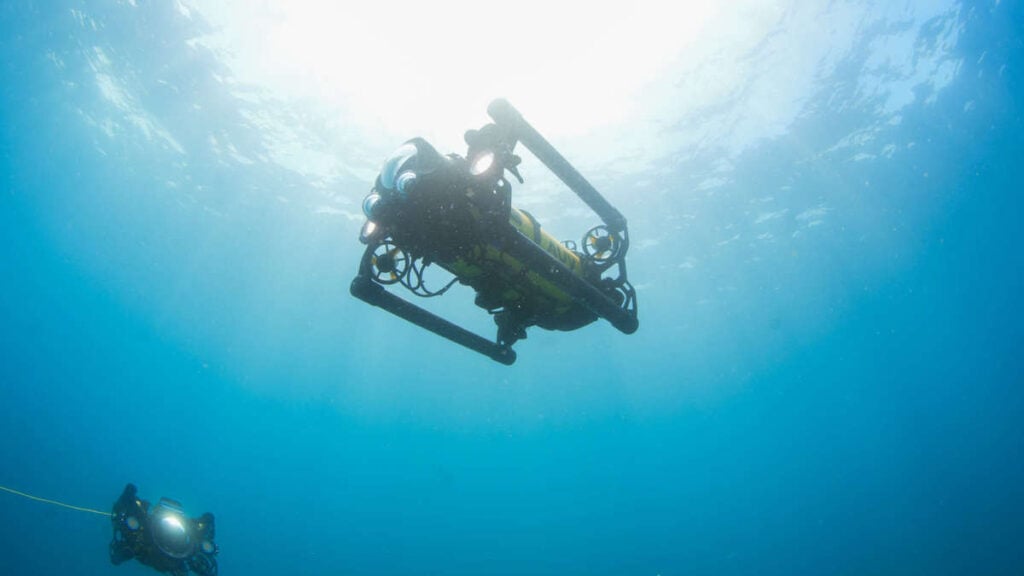
The Boxfish ROV is an advanced video ROV system that delivers sharp, uncompressed, near-zero latency 4K video. Weighing just 23 kg, it can be easily setup and launched within minutes by a crew of two, and is able to operate at depths of up to 500m as standard, with options for 1000m and beyond.
Eight 3D-vectored thrusters provide six degrees of freedom of movement, allowing the underwater robotic vehicle to travel and orientate itself in any direction and operate even in tight spaces and strong currents.
The submersible ROV’s uncompressed main 4K underwater video camera is complemented by two additional built-in ultra-wide-angle navigation cameras, offering unprecedented surround visibility and superior situational awareness. Two 8,500-lumen lights provide excellent illumination allowing image capture even in total darkness.
The control station includes a 17 inch 4K monitor for crisp image and video viewing, as well as a 10 inch screen that displays footage from the ultra-wide angle cameras.
The Boxfish ROV can operate for up to 14 hours on a single charge, and sealed quick-access ports allow it to be charged easily in the field. In case of unexpected difficulties, the subsea ROV’s fault-tolerant design allows it to continue to operate even with several fouled thrusters. If communication is lost, the underwater robotic system will automatically return to the surface under its own power.
High-Accuracy Underwater Photogrammetry
The Boxfish ROV has been engineered for high-resolution 3D underwater photogrammetry, with an uncompressed 4K video stream, six degrees of freedom movement and actively stabilised platform.
Underwater assets are quickly and easily captured from all angles with optimal lighting to ensure complete and accurate models. High resolution crisp and clear images result in the highest quality 3D photogrammetry products.
USBL Positioning
The Boxfish ROV can be enhanced with an optional navigation package that includes a USBL (ultrashort baseline) positioning system for position tracking and control. A USBL transponder is mounted or suspended from the mother vessel, wirelessly communicating via high-frequency sound waves with a beacon installed on the ROV.
For real-time position monitoring, an included GPS module can be attached to the USBL system on the vessel. Positioning software combines the data from the USBL transponder and the GPS module to calculate and display the absolute global position of the ROV on the Boxfish Control Station or on a separate laptop.
The Boxfish Alpha is a next-generation underwater ROV designed for inspection, observation and light intervention work. Based on the design of our proven 1000m Boxfish ROV, Alpha includes eight thrusters for six degrees of freedom of movement, allowing it to travel and orient itself in any direction and navigate under highly challenging conditions.
The versatile vehicle is easy to operate and can be deployed rapidly with minimal setup. The integrated 4K camera with 6x zoom allows users to live-stream or capture detailed footage, making it ideal for non-intrusive inspection and monitoring of underwater assets. Profiling sonars can also be used to create detailed 3D models.
With auto-stabilization and precision control, Alpha is also ideal for a range of maintenance tasks, and can be equipped with optional tools such as manipulators, line cutters, grabbers, and jaws. Additional accessories include USBL systems, Doppler velocity logs (DVL), and laser scalers.
We offer a wide range of ROV equipment and accessories that allow you to extend the functionality of your underwater drone even further. These include:
USBL systems –
for ROV tracking and backup wireless communications
Multibeam imaging sonars – for navigation and to locate stationary or moving objects
Altimeters –
maintain a consistent height over the bottom during operations
Doppler Velocity Log (DVL) – provides estimation of velocity relative to the sea bottom
Manipulator & grabbers – allow the operator to conduct a range of operations
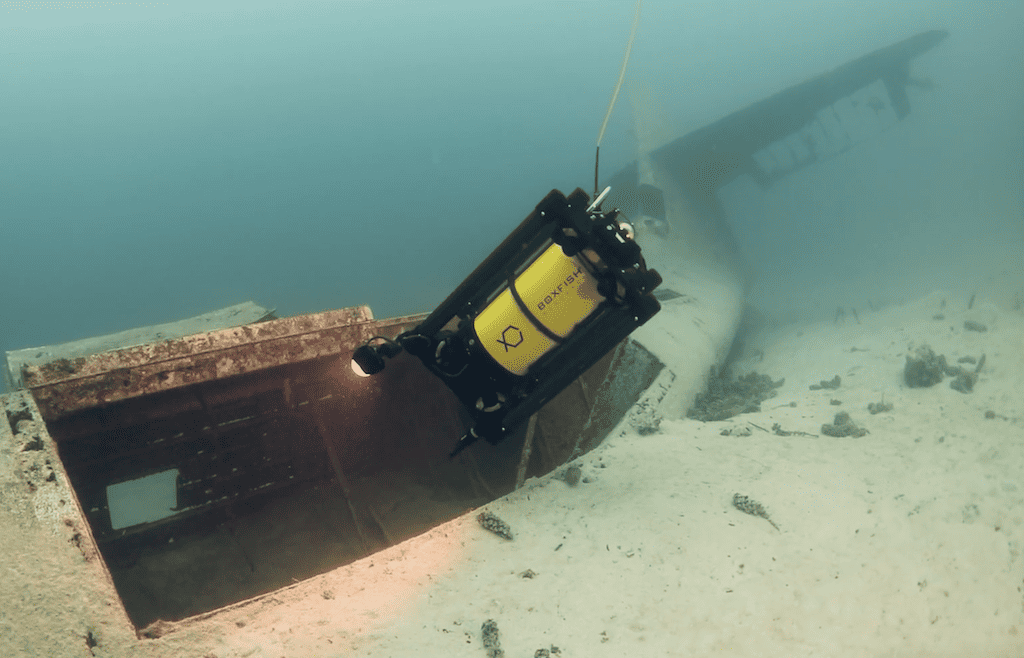
Boxfish is ideal for obtaining high quality imagery, video and underwater photogrammetry of submerged assets, providing users with the information required to make quick and accurate decisions and schedule future maintenance.
With the ability to undertake inspection missions quickly and safely under a wide range of water conditions, Boxfish is ideal for a range of military, law enforcement and first responder applications, such as contraband detection, unexploded ordnance (UXO) and search and rescue (SAR).
Easily launched from land or small vessels, the Boxfish ROV provides a cost-efficient option to research institutions and educators, and can be equipped with a wide range of sensors and sampling systems.
The Boxfish Luna provides underwater filmmakers with a stable filming platform and real-time streaming of production-quality video, eliminating many of the restrictions and pain points associated with the use of human divers.
Case Studies
Read our case studies to learn how our underwater vehicles are being used around the world
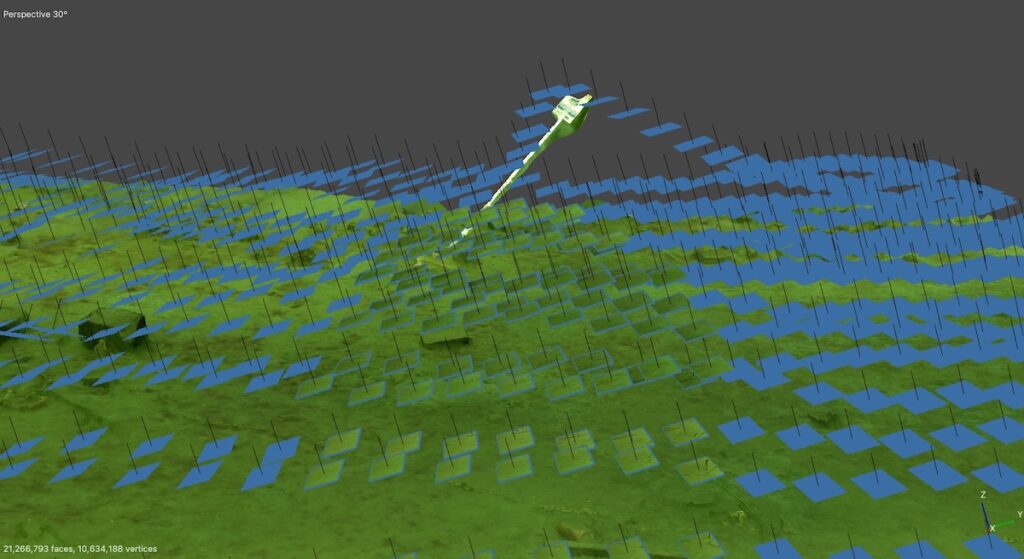
Boxfish Robotics will demonstrate hovering AUV capabilities for geo-referenced transects, high-resolution data capture and repeatable reef and benthic surveys
In this case study, Boxfish Robotics’ ROV helped Deep Dive Division inspect a 163-meter tunnel using imaging sonar, pipe profiling sonar, and 3D modeling
Boxfish Robotics is developing a dedicated underwater robotic platform for a Great Lakes documentary, supporting imaging operations in complex freshwater environments
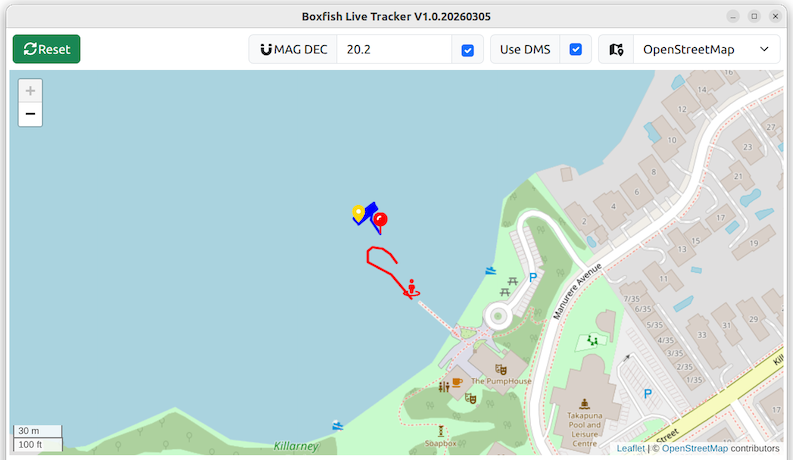
Boxfish Robotics details its AUV Software Suite, which combines the SafePath Mission Planner, Boxfish Commander, and Boxfish Live Tracker applications to support autonomous underwater survey planning, mission execution, and spatial visualization
Boxfish Robotics is advancing autonomous underwater vehicle operations by integrating DVL sensing and stereo camera perception to navigate complex environments while maintaining strict route consistency required for high-quality survey data
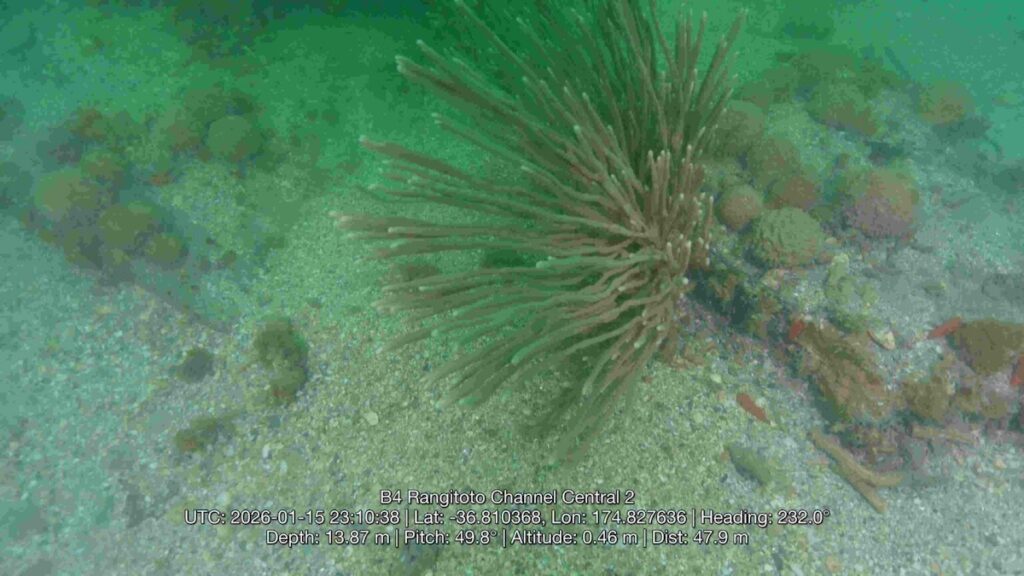
A Port of Auckland survey using a Boxfish Robotics hovering AUV demonstrates how autonomous seabed transects can improve data consistency and environmental monitoring workflows
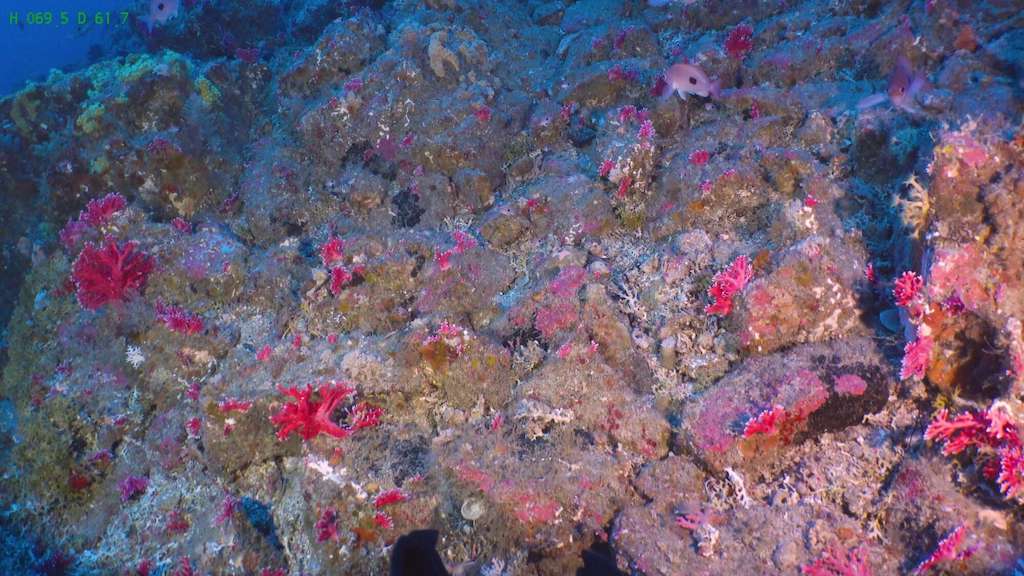
Boxfish Robotics' remotely operated vehicle technology enables non-invasive visual surveys in marine protected areas, supporting biodiversity research, rare species detection, and data-driven management of deep and mesophotic marine habitats
Deployed by University of Tasmania researchers, a custom Boxfish ROV completed a 50-transect Beagle Marine Park survey, with footage premiering on YouTube on Wednesday, 19 November at 7 pm AEDT
On September 14th, Boxfish Robotics’ advanced Remotely Operated Vehicles will be deployed in the first live-streamed survey of Superior Shoal, a 300-meter underwater mountain in Lake Superior, delivering real-time access to one of the least-studied freshwater regions
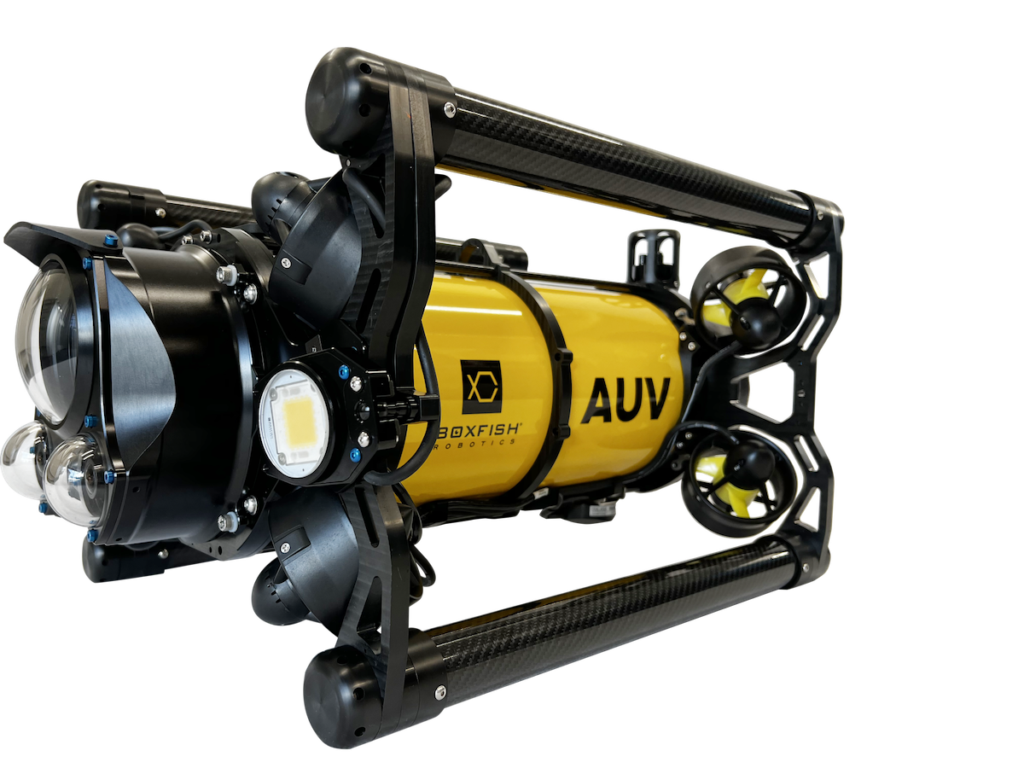
The Boxfish AUV Research Kit provides research institutions with a complete platform for underwater computer vision, combining proven hardware, advanced imaging, and industry-leading software
Boxfish Robotics combines advanced navigation technologies, including USBL, IMU, and DVL, with integrated sensor fusion to enable precise, reliable, and tetherless operation of hovering autonomous underwater vehicles (AUVs)
A research team looking into mesophotic ecosystems utilized the Boxfish Alpha to carry out high-resolution surveys and sampling across a range of mesophotic sites around New Zealand
Boxfish Robotics' first generation of fully autonomous tetherless hovering Boxfish AUV features advancements in autonomy that aim to set a new standard in underwater exploration
At Ocean Business 2025, stand V45, April 8-10, Boxfish Robotics are set to present their innovative underwater robotics equipment and their shift to tetherless autonomous vehicles
Boxfish details how the Luna™ ROV enabled the groundbreaking Great Lakes documentary "All Too Clear" by Inspired Planet Productions, which revealed the impact of invasive quagga mussels
Boxfish’s Luna ROV has been reviewed by a filmmaker from Black Whale Pictures, sharing insights into camera operation and safety features, delving into the ROV’s key components
Boxfish Robotics has upgraded its AUV's 4K camera head with separate domes for stereo and 4K cameras, enhancing image quality and 3D machine vision capabilities
Boxfish’s most recent case study discusses how cutting edge technology, like the highly customisable Boxfish Luna, can bring art to life in underwater cinematography
Boxfish Robotics aims to lead the underwater robotics revolution with unparalleled innovation, clarity in underwater imagery, and a commitment to sustainable ocean exploration
Boxfish believes S2 Services’ hands-on experience using the Boxfish ROV in the field will be invaluable in delivering exceptional customer service to its clients
The capability to upgrade the Boxfish ROV platform to perform autonomous and semi-autonomous tasks aims to deliver better data, enhanced survey repetition and increased efficiency in underwater operations
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.






")














")