Véhicules sous-marins télécommandés (ROV) pour les applications sans pilote
Choisissez parmi une gamme de véhicules télécommandés (ROV) conçus pour des opérations sous-marines dans des environnements commerciaux, scientifiques et de défense. Cette catégorie met en relation les professionnels des systèmes sans pilote avec les fournisseurs et fabricants spécialisés dans les missions d'inspection, d'intervention, de surveillance et de recherche sous-marines.
Si vous concevez, construisez ou fournissez Véhicules télécommandés (ROV), Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Véhicules sous-marins télécommandés (ROV) pour les applications sans pilote
Vue d'ensemble par
Summer James
Mise à jour:
Les véhicules télécommandés (ROV) sont des robots sous-marins captifs utilisés dans les secteurs de l’énergie offshore, des sciences marines, de l’inspection des infrastructures et de la défense. Bien que de nombreux véhicules puissent être configurés pour des rôles multiples, l’industrie classe généralement les ROV en deux catégories :
Par classe – en fonction de la taille, de la capacité et de la puissance.
Par application – en fonction de la mission pour laquelle ils sont équipés.
Comprendre ces deux perspectives aide les ingénieurs, les opérateurs et les équipes de projet à choisir le bon véhicule pour la tâche à accomplir.
SRV-8 MDV par Oceanbotics
Types de ROV par classe
Mini ROV
Également connus sous le nom de : Micro ROVs, Petits ROVs, ROVs de type Eyeball
Les mini ROV sont des systèmes compacts et portables conçus principalement pour l’inspection visuelle dans des environnements confinés, peu profonds ou à faible risque. Ils sont souvent utilisés à partir de petits navires, de pontons ou même de sites à terre et peuvent être déployés rapidement avec un minimum d’équipage et d’infrastructure. Les options de charge utile se limitent généralement à des caméras, des lumières et un sonar de base. Néanmoins, leur faible coût et leur facilité d’utilisation les rendent populaires pour les voies navigables intérieures, l’aquaculture, les contrôles de base de la coque et les évaluations rapides.
ROV d’observation
Également connus sous le nom de : ROV d’observation, ROV d’inspection, ROV de classe inspection, ROV de classe enquête
Les ROV d’inspection occupent le niveau intermédiaire des capacités. Ils sont plus grands et plus puissants que les systèmes miniatures, offrant une meilleure stabilité, une imagerie de meilleure qualité et la possibilité d’intégrer des capteurs tels que des sonars multifaisceaux, des scanners laser et des aides au positionnement.
Ils sont largement utilisés pour les inspections structurelles, la surveillance de l’environnement et les tâches d’arpentage qui nécessitent une connaissance détaillée de la situation, mais ne requièrent pas d’outils d’intervention lourds. Les variantes configurées pour les levés peuvent prendre en charge la métrologie, la cartographie des fonds marins ou les travaux bathymétriques.
ROV de classe professionnelle
Les véhicules de classe professionnelle sont conçus pour des missions offshore exigeantes où la capacité de charge, la stabilité et la puissance sont essentielles. Ils opèrent à des profondeurs plus importantes, prennent en charge plusieurs manipulateurs et intègrent des systèmes de contrôle avancés et un outillage lourd.
ROV légers de classe professionnelle
Également connus sous le nom de : ROV utilitaires, ROV de service moyen
Les plates-formes de travail légères comblent le fossé entre les véhicules d’inspection et les véhicules d’intervention complète. Elles offrent une plus grande poussée, de meilleures options de charge utile et une capacité d’outillage limitée, ce qui les rend adaptées aux travaux d’utilité générale, à l’aide à la construction légère et aux inspections plus complexes.
ROV lourds
Également connus sous le nom de : ROV de travail lourd, ROV de construction
Les systèmes de travail lourds sont conçus pour l’intervention et la construction dans des environnements offshore profonds et difficiles. Ils transportent généralement des manipulateurs doubles, des outils hydrauliques, des systèmes de coupe, des outils dynamométriques et des interfaces sous-marines spécialisées. Ces véhicules sont standard dans les programmes pétroliers et gaziers, éoliens offshore et de construction sous-marine.
Types de ROV par application
Alors que la classe décrit la plateforme, l’application décrit la configuration de la mission. Un seul véhicule peut souvent remplir plusieurs rôles en échangeant les charges utiles et les outils.
Véhicule télécommandé REVOLUTION de Deep Trekker
ROV d’intervention
Configurés pour interagir physiquement avec l’équipement sous-marin – actionner des vannes, insérer des outils, connecter des tuyaux et effectuer des réparations. Ils sont généralement équipés de manipulateurs, d’outils dynamométriques et d’interfaces hydrauliques.
ROV de construction
Ils participent à l’installation et à la mise en service des structures sous-marines, en assistant les opérations de grutage, en guidant les placements, en contrôlant l’alignement et en effectuant les vérifications finales.
ROV d’inspection, de réparation et de maintenance (IRM)
Optimisent les tâches liées à l’intégrité des actifs à long terme. Ils combinent des outils d’inspection de haute qualité avec des manipulateurs et une capacité d’intervention légère.
ROV de creusement de tranchées
Conçus pour couper ou fluidifier les matériaux du fond marin afin de créer des tranchées pour les câbles et les pipelines. Ils sont souvent équipés de systèmes de découpe mécanique ou par jet.
ROV d’enfouissement de câbles et de pipelines
Véhicules spécialisés qui repositionnent ou enfouissent les actifs après leur installation. Ils peuvent suivre un itinéraire établi et assurer une profondeur d’enfouissement conforme pour la protection.
ROV remorqués
Les véhicules hydrodynamiques sont tirés derrière un navire. Ils sont idéaux pour les études sonar et d’imagerie sur de vastes zones, où l’endurance et la couverture sont plus importantes que la maniabilité.
ROV en eaux profondes / ultra-profondes
Conçus pour des profondeurs et des pressions extrêmes. Ces systèmes mettent l’accent sur la fiabilité, la redondance et les matériaux spécialisés pour permettre l’exploration scientifique et le travail industriel en eaux profondes.
ROV scientifiques / de recherche
Configurés pour l’échantillonnage, l’observation de l’habitat et les mesures océanographiques. Ils sont généralement équipés de capteurs scientifiques, de paniers d’échantillonnage et d’un système de maintien à poste précis.
Le ROV compact Mission Specialist Ally de VideoRay
ROV pour l’aquaculture
Les ROV aquacoles sont utilisés pour surveiller, inspecter et entretenir les infrastructures piscicoles, notamment les filets, les cages, les amarres et les systèmes d’alimentation. Ils aident les exploitants à évaluer la santé des stocks, à détecter les dommages ou les salissures biologiques et à vérifier l’intégrité des amarres sans le coût et le risque de l’intervention d’un plongeur. De nombreux ROV destinés à l’aquaculture privilégient la maniabilité, la portabilité et la qualité des caméras, ce qui les rend bien adaptés aux opérations quotidiennes des fermes et aux inspections de conformité de routine.
ROV de sauvetage
Utilisés pour la recherche, la récupération et l’évaluation médico-légale d’épaves ou d’équipements perdus. Ils intègrent souvent des outils de préhension, des aides au levage et des images très détaillées.
ROV d’inspection des pipelines
Équipés de sonars, de caméras, de lasers et d’outils de suivi pour suivre, documenter et évaluer l’état des pipelines sous-marins.
ROV d’inspection de câbles
Similaires aux systèmes d’inspection des pipelines, mais optimisés pour les câbles à fibres optiques et les câbles d’alimentation, y compris la localisation des défauts et la vérification de l’enfouissement.
ROV d’inspection nucléaire
Conçus pour les piscines de réacteurs et les environnements contaminés. L’accent est mis sur les matériaux tolérants aux radiations, la taille compacte et le contrôle précis.
ROV militaires / de lutte contre les mines (MCM)
Soutiennent les missions navales, y compris la détection, l’investigation et la neutralisation des mines, souvent dans des environnements dangereux ou peu profonds où les plongeurs ne peuvent pas opérer.
ROV de sécurité portuaire
Les ROV de sécurité portuaire soutiennent l’application du droit maritime et les autorités portuaires en permettant une investigation sous-marine rapide dans des environnements très fréquentés, confinés et à faible visibilité. Ils sont utilisés pour inspecter les coques des navires, les jetées et les murs de quai à la recherche de dangers, de contrebande et de problèmes structurels, sans perturber les opérations portuaires ni mettre les plongeurs en danger. Ces systèmes intègrent souvent un sonar imageur, des caméras haute définition et des outils de manipulation optionnels pour documenter les résultats et soutenir les interventions en cas d’incident.
ROV EOD
Véhicules de neutralisation des explosifs et munitions adaptés aux tâches sous-marines, permettant l’évaluation à distance et la manipulation en toute sécurité des munitions non explosées.
ROV d’inspection des conduites forcées, des prises d’eau et des tunnels
Opérer à l’intérieur des tunnels de prise d’eau, des conduites forcées et des longs conduits avec une visibilité limitée et un espace de manœuvre restreint.
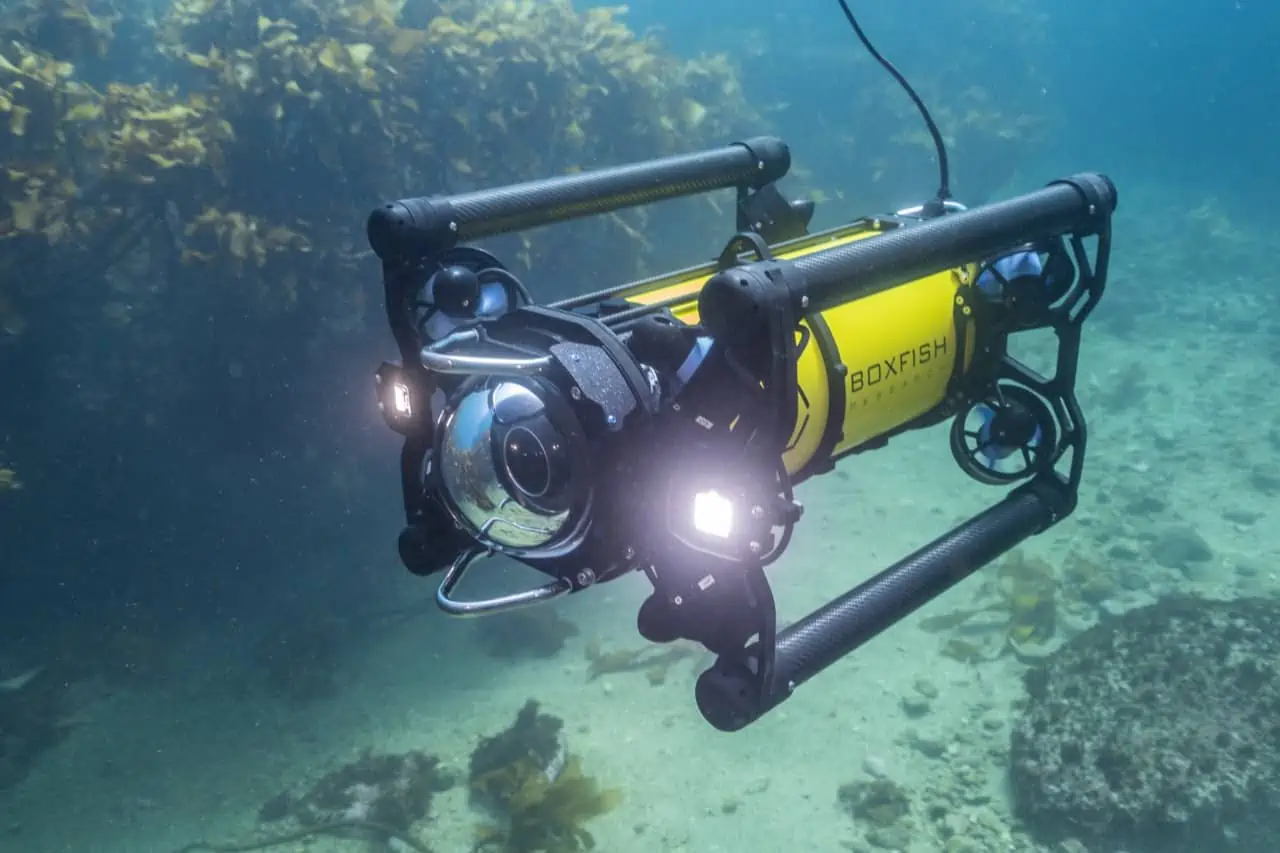
ROV Boxfish de Boxfish Robotics
Systèmes hybrides ROV/AUV
Ils combinent des opérations captives avec des modes autonomes. Ils peuvent effectuer des études approfondies en tant qu’AUV, puis se reconnecter ou fonctionner en mode captif pour les interventions.
ROV résidents
Restent amarrés en mer pendant des semaines ou des mois, prêts à être déployés à la demande. Ils sont idéaux pour les installations nécessitant des inspections fréquentes sans mobilisation répétée des navires.
ROV à nage libre (excursion prolongée)
Fonctionnent avec de longues attaches ou des systèmes TMS, ce qui leur permet de s’éloigner considérablement du point de déploiement.
ROV déployés à l’aide d’un système TMS (lancés dans une cage)
Lancés à l’intérieur d’un système de gestion des câbles (TMS), ils améliorent la maniabilité en eaux profondes et dans les courants forts, tout en protégeant l’ombilical principal.
Déploiement des systèmes de lancement et de récupération (LARS)
Les systèmes de lancement et de récupération (LARS) sont des systèmes de manutention spécialement conçus pour déployer et récupérer les ROV en toute sécurité dans différents états de la mer. Les installations typiques comprennent des cadres en A, des grues, des treuils et des systèmes d’amarrage guidés qui stabilisent le véhicule lorsqu’il entre ou sort de l’eau. Les unités LARS sont souvent intégrées à des systèmes de gestion des câbles (TMS) pour protéger l’ombilical et réduire les charges sur le véhicule, améliorant ainsi la sécurité, la répétabilité et le temps de fonctionnement pendant les missions en mer.
Normes et considérations relatives à l’intégration
Le déploiement des ROV sous-marins est influencé par les normes industrielles et les meilleures pratiques en matière de sécurité électrique, de tests de pression, de compatibilité électromagnétique et de protection de l’environnement. Dans les programmes de défense et gouvernementaux, l’alignement sur les spécifications militaires et maritimes pertinentes favorise l’interopérabilité et l’assurance opérationnelle. Pour les utilisateurs commerciaux et les chercheurs, le respect des normes sous-marines reconnues favorise la sécurité des opérations, la longévité des systèmes et la conformité aux réglementations dans divers environnements d’exploitation.
Alors que les opérations sous-marines continuent de se développer dans les domaines de l’énergie, de la défense, des infrastructures et de la science, les véhicules télécommandés restent une capacité fondamentale dans l’écosystème plus large des systèmes sous-marins sans pilote.