If you design, build or supply Unmanned Underwater Vehicles UUV, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
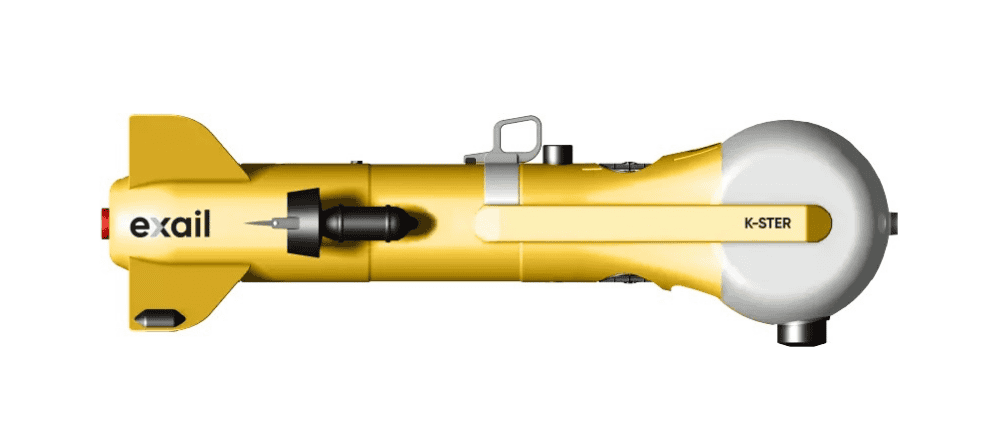
Mine disposal system for underwater threat neutralization
Mine disposal system for underwater threat neutralization
...ht, expandable underwater mine disposal vehicle designed for mine countermeasure and explosive... ...ls, RHIBs, and unmanned surface vessels. Its compact form factor, intuitive control interface, and...
...L and INS, the underwater robotic vehicle is capable of carrying out missions in challenging subsea... ...the autonomous underwater drone revolutionising underwater data collection by eliminating the...
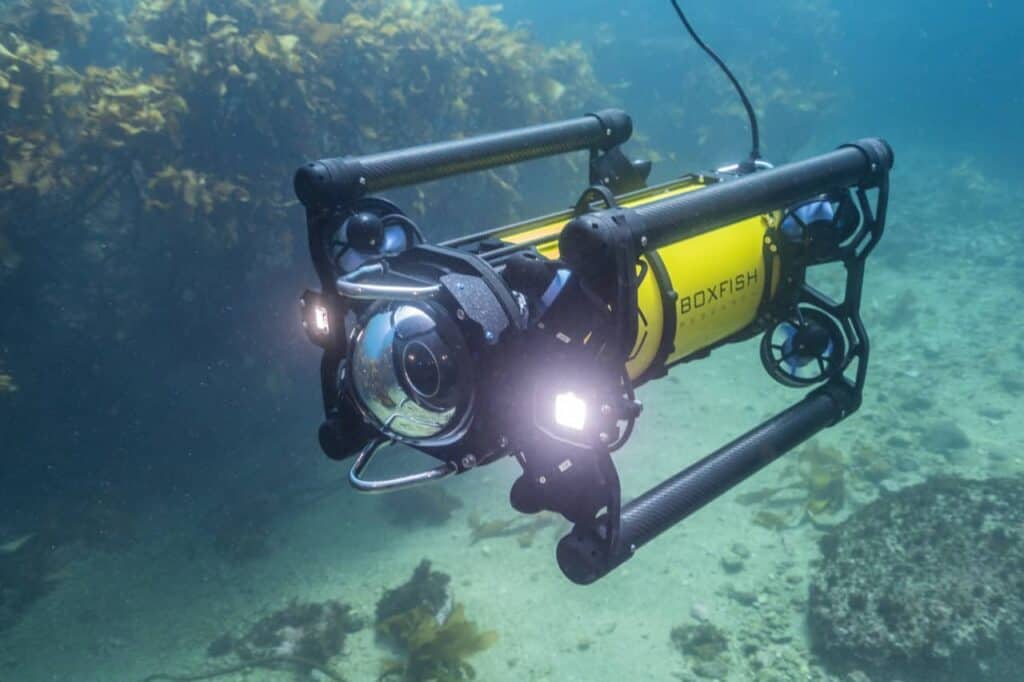
The ultimate portable and toughest micro ROV on the market.
The ultimate portable and toughest micro ROV on the market.
...oughest little ROV on the market. Powered by six thrusters, engineered with aluminium and carbon... ...ican case, the ROV is easily portable. The battery tube is certified for both passenger and cargo...
Intelligent and advanced capabilities for underwater surveys
Intelligent and advanced capabilities for underwater surveys
...ervation class ROV, designed for quick deployment and reliable underwater surveys.... ...ion-class mini ROV designed for quick deployment and low-maintenance operation. Fitting completely...
Mission ready with advanced stabilization and payload capabilities.
Mission ready with advanced stabilization and payload capabilities.
......anced stabilization allows users to pilot the vehicle precisely underwater, even in high current.... ...t and flexible underwater capabilities for complex deep ocean missions. It consists of six thrusters...
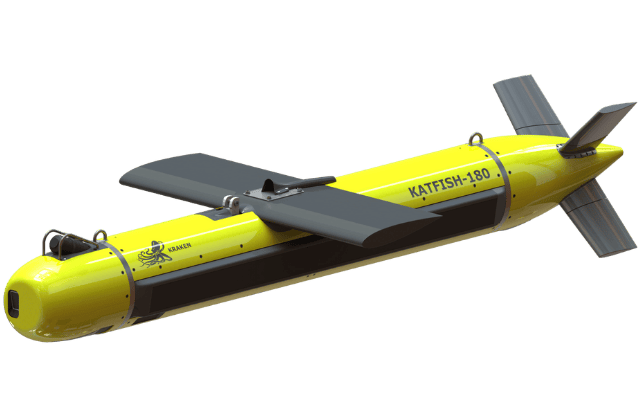
Modular autonomous underwater vehicle for advanced subsea operations
Modular autonomous underwater vehicle for advanced subsea operations
...ration modular underwater platform engineered to accommodate a wide range of payloads and mission... ......, cost-efficient subsea operations, offering a versatile platform for a range of underwater...
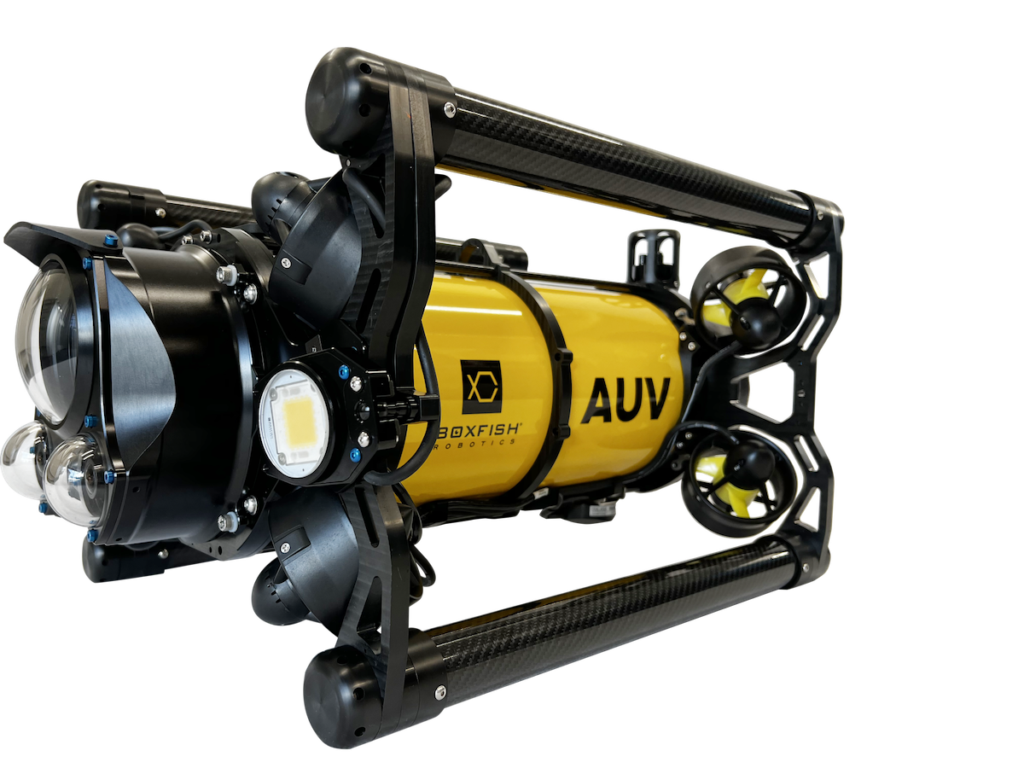
Tetherless hovering autonomous underwater vehicle for scientific & inspection missions
Tetherless hovering autonomous underwater vehicle for scientific & inspection missions
...ing autonomous underwatervehicle engineered for precise subsea operations and data collection in... ...ilization, the vehicle delivers enhanced maneuverability in constrained underwater environments....
Unmanned underwater vehicles, or UUVs, also known as Unmanned Undersea Vehicles, are vehicles that are capable of operating while submerged underwater without the need for a human to be physically occupying the vehicle. They can be divided into two main categories – Remotely Operated Vehicles (ROVs) and Autonomous Underwater Vehicles (AUVs).
Autonomous Underwater Vehicles AUVs
Autonomous Underwater Vehicles are capable of functioning without real-time control from a human operator. They can be programmed to collect data along a predetermined route, and some are able to make decisions and potentially change their mission parameters according to the received data.
Due to the attenuation of radio waves in water, AUVs cannot rely on direct GPS navigation once submerged. Dead reckoning can be used to establish an estimate of position, although errors compound quickly. This positional estimate can be further improved by additional data from underwater acoustic transponders, GPS positions of nearby surface references, or temporary surfacing to establish a GPS fix. Acceleration and velocity estimates can be calculated using an Inertial Measurement Unit, and improved with a Doppler Velocity Log, a device similar to sonar which measures the rate of travel over the sea floor.
Phantom 2 UUV/AUV by Dynautics
Propulsion methods for AUVs
The most common propulsion methods for AUVs are propeller-based thrusters and Kort nozzles, usually powered by electric motors. AUVs may also “glide” through the water – by changing buoyancy, underwater gliders are able to alter their depth, and use airfoil wings to convert this movement into forward motion.
ecoSUBm-Power+ v2 AUV by ecoSUB Robotics
AUVs are used extensively for surveying by the oil and gas industry and in scientific research. They are also used for naval defense applications such as mine detection, payload delivery and surveillance. Military AUVs have been networked with UAVs (unmanned aerial vehicles) to provide a cross-domain ISR (Intelligence, Surveillance and Reconnaissance) solution for the battlefield.
Unlike AUVs, ROVs are not capable of functioning without real-time control from a human operator. ROVs were developed to overcome the limitations of human divers and human-occupied diving vehicles. They are operated remotely by a crew on board a nearby vessel, and connected to their base of operations via an umbilical link that provides both a tether and a power, communications and data link. ROVs that operate in deeper or rougher water will also be fitted with a Tether Management System (TMS), which regulates the length of the tether to minimize the effects of underwater drag on the cable.
ROVs can be divided into different classes according to their size, weight or function. There are several different classification schemes.
Observation or inspection-class vehicles
The smallest ROVs are often known as observation or inspection-class vehicles, the simplest of which may carry only a single camera. More sophisticated vehicles of this class may also be equipped with sonar and other sensors. Typical operational depths may range from several hundred to several thousand feet depending on vehicle size.
Work-class ROVs
At the other end of the spectrum are the work-class ROVs. These are fitted with a hydraulic pump to provide the extra power needed for additional equipment and for propulsion at greater depth.
Work-class ROVs are able to operate more powerful equipment such as manipulators and cable-layers. Vehicles of this class have been designed to operate at depths of up to and even exceeding 30,000 feet.
BeeX’s new 100-meter depth-rated BETTA combines a 12 kWh battery, seven-sensor configuration, IHO-rated positioning accuracy, and support for 24-hour autonomous inspection, survey, and light intervention operations
Built for coastal and shallow-water environments, ALSEAMAR’s SEAEXPLORER 200 provides long-duration autonomous data collection with configurable battery options, adaptable payload integration and compact deployment logistics
The US Navy has secured an $18.1 million agreement with Greensea IQ to deliver advanced hardware, software, and engineering services for underwater controllers operating autonomous subsea defense systems
Boxfish Robotics will demonstrate hovering AUV capabilities for geo-referenced transects, high-resolution data capture and repeatable reef and benthic surveys
Forcys outlines the maritime security challenges posed by increasingly accessible AUVs and UUVs, and the underwater acoustic monitoring capabilities required to detect potential threats to critical underwater infrastructure
CNRS and ALSEAMAR have deployed ten SEAEXPLORER autonomous underwater gliders in the Ligurian Sea to collect data on underwater noise, currents, eddies, and marine ecosystem dynamics for a future environmental atlas
Phantom 2 AUV's unique free-flooding payload architecture and advanced mission control algorithms propel Dynautics to top honors at the Seawork Innovations Showcase
Jul 01, 2026
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.