Blue Robotics is a leading developer of marine robotics systems, parts and components. With a prime focus on cost and accessibility, our ocean ROV (remotely operated vehicles) and USVs (uncrewed surface vessels) enable a wide range of missions for commercial, research and exploration applications.
Both our hardware and software are based around open-source designs, making them highly accessible to hobbyists and professionals alike and allowing vast scope for customization, modification, and reconfiguration. Our online forums provide our thriving community of ocean ROV users with support, resources, and much more.
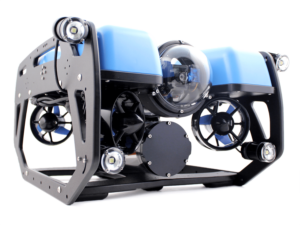
BlueROV2 Remotely Operated Vehicle
Versatile tethered ROV for underwater inspections
The BlueROV2 is a high-performance, highly configurable ROV designed for underwater inspections, research and ocean exploration.
Featuring open-source hardware and software, the platform features an unprecedented level of flexibility and expandability, allowing users to easily make improvements and upgrade ROV parts to take on a huge variety of missions down to depths of 100m (330 feet).
The tethered ROV incorporates six of our T200 thrusters in a vectored configuration, delivering excellent thrust-to-weight ratio and providing the ability to move precisely in any direction. The system can be expanded to eight thrusters via our Heavy Configuration Retrofit Kit, and features adjustable gain levels for precision control at extremely low speeds as well as high power to overcome currents and carry heavy loads.
The BlueROV2 is provided with our Fathom ROV tether, with available length options from 25m (82 ft) up to 300 m (984 ft).
Live HD video and modular design for flexible payload configuration
The underwater ROV features a front-mounted high definition (1080p, 30fps) wide-angle low-light camera that has been specially optimized for the platform. The camera’s tilt mechanism allows the pilot to look up or down even when the vehicle is level. A choice of two or four dimmable lights provides illumination of up to 6000 lumens.
The BlueROV2’s open frame has been designed like a research- or work-class ROV, allowing easy attachment of a wide variety of accessories, including custom and third-party.
We also provide a versatile payload skid that further extends the frame and facilitates the attachment of much larger payloads.
We provide a range of parts and accessories that allow you to expand the capabilities of your BlueROV2, including:
Newton Gripper – manipulate and retrieve objects underwater
Fathom Spool – for easier transportation and deployment of the tether cable
Ping360 Scanning Sonar – provides enhanced navigation and object location in low visibility
BlueROV2 with integrated Ping360
Open-source user interface & control software
Based around the widely-utilized ArduSub subsea vehicle control firmware, the BlueROV2 provides a vast suite of features and capabilities, as well as scope for extensive expansion.
The tethered ROV can be controlled via a Windows, Mac or Linux laptop and a gamepad controller. An intuitive and user-friendly user interface is provided by the open-source QGroundControl application, which provides live video streaming, sensor feedback and information, as well as the ability to change settings and configuration.
Uncrewed vessel for hydrographic survey and system development
The BlueBoat is a versatile and highly cost-effective USV platform designed for hydrographic survey as well as development of marine robotics systems. Designed to be user-friendly and easy to get started with, the system is highly expandable and incorporates the open-source BlueOS software.
Featuring an innovative hull design with a low-wake sensor area for survey sonars and other equipment, the BlueBoat can be equipped with a wide range of payloads to suit any marine robotics application. The unique hull shape also ensures that the vessel is not obstructed by weeds and other debris.
The BlueBoat provides over 60 hours of continuous operating time with maximum battery capacity and up to 9 hours on a single battery, making it ideal for long-endurance missions. It includes a long-range wifi radio that can connect to the BaseStation box from up to 1 km away, and 4G LTE and Iridium SATCOM capabilities will be added in the future.
The T200 is a powerful and compact underwater thruster for AUVs and ROVs and can also be used to convert a wide variety of floating platforms into USVs (unmanned surface vessels).
It features a patented fully-flooded brushless motor design that provides cooling and lubrication for enhanced efficiency and longer life.
The thruster’s body and propeller are constructed from durable polycarbonate plastic, and the only exposed metal components are made from marine-grade 316 stainless steel.
The compact design features a minimal number of parts, simplifying operation and maintenance.
The T200 marine thruster is ideal for powering a wide range of autonomous and unmanned underwater and surface platforms in commercial and research applications such as inspection, environmental monitoring, aquaculture, shipwreck exploring and more. It has also been used as the thruster of choice in many underwater robotics competitions such as MATE ROV and RoboSub AUV.
T200 Thruster on QUT's RangerBot
T200s on FeelHippo AUV of the University of Florence
The T200 thruster is provided ready to use out of the box, and includes both clockwise and counterclockwise propellers.
We can also provide all the other components you need to get up and running, including an electronic speed controller (ESC), power source and signal source.
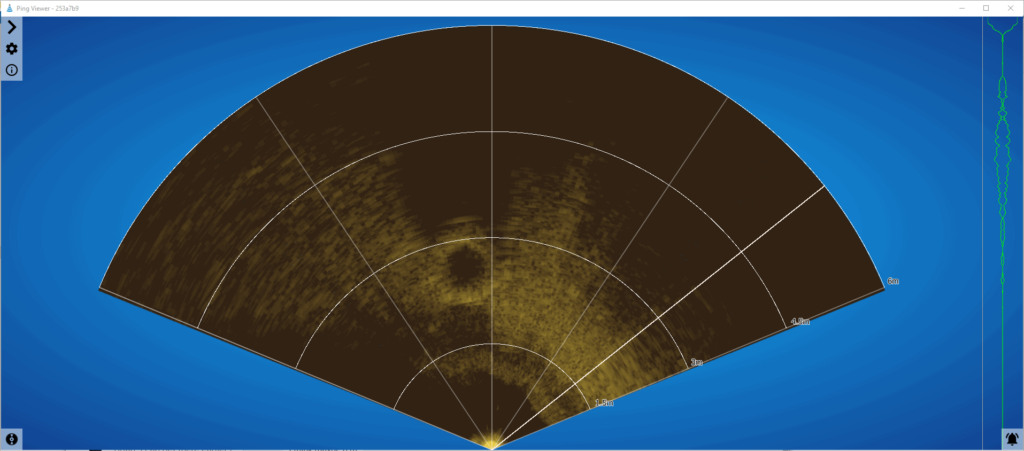
The Ping360 is a mechanical scanning sonar for ROV navigation and underwater acoustic imaging that features a range of to 50 metres (165 feet) and a depth rating of 300 metres (984 feet). Providing excellent performance in low-visibility conditions, it is ideal for inspection, obstacle avoidance, target location and tracking, and more.
Ping360 scanning sonar delivers a top-down view
Dock Pilings in front of the BlueROV2
Measuring acoustic echoes in one-degree increments through a full 360 degrees, the scanning ROV sonar delivers a top-down view of the ROV’s surroundings, providing visibility of objects and structures such as ropes, walls, dock pilings, rocks, shipwrecks, boats and marine life.
The Ping360‘s design features a rugged anodized aluminium housing with an oil-filled section at the top for the acoustic transducer. The unit is easily mounted to ROVs with four M3 mounting holes and an included bracket, and the 1-metre (3.3 foot) cable comes with a pre-installed cable penetrator.
The Ping360 connects to our intuitive open-source Ping-Viewer application for easy system control and data display. Ping-Viewer runs on Windows, Mac, and Linux and can connect to the Ping360 through a direct connection to the computer or through the Companion web interface on the BlueROV2.
Updated Ping-Viewer Interface showing a tire found with Ping360
The Ping360’s Ping-Protocol binary message format allows easy integration into a wide range of systems, and we can provide Arduino and Python libraries to get developers up and running as quickly as possible.
To enable the future of marine robotics and increase transparency in the industry, we recently released A Sea of Small ROVs, a resource that compares the specs and pricing in different product classes.
Click the image to download the full ROV comparison
Resources
Discover our technical guides, tutorials, documentation and support in our resource library. Discover more >
Community Forums
Check out our community forums for discussions builds, dive logs, product support and much more… Join the discussion >
Buyer’s Guide
We have created a reference for new users who are working in specific industries, but don’t really know what they need… Buyer’s Guide >
Service Providers
We’ve created a Service Provider map for our entire community of users – for those looking to utilize ROVs & AUVs in their projects and the organizations providing the tools and technology to perform such services. Find Service Providers >
When you submit this form, your personal data will be transferred to the company who will respond to you directly. See our Privacy Policy for details on how we process your data and your rights.