Podwodne zdalnie sterowane pojazdy (ROV) do zastosowań bezzałogowych
Proszę wybierać spośród szerokiej gamy zdalnie sterowanych pojazdów (ROV) przeznaczonych do operacji podwodnych w środowiskach komercyjnych, naukowych i obronnych. Ta kategoria łączy specjalistów od systemów bezzałogowych z wyspecjalizowanymi dostawcami i producentami wspierającymi inspekcje podwodne, interwencje, monitorowanie i misje badawcze.
Jeśli projektujesz, budujesz lub dostarczasz Zdalnie sterowane pojazdy (ROV), Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Podwodne zdalnie sterowane pojazdy (ROV) do zastosowań bezzałogowych
Przegląd według
Summer James
Aktualizacja:
Zdalnie sterowane pojazdy (ROV) to podwodne roboty na uwięzi wykorzystywane w energetyce morskiej, naukach morskich, inspekcji infrastruktury i obronności. Chociaż wiele pojazdów można skonfigurować do wielu ról, branża generalnie kategoryzuje ROV na dwa sposoby:
Według klasy – w oparciu o rozmiar, możliwości i moc.
Według zastosowania – w oparciu o misję, do której są przystosowane.
Zrozumienie obu perspektyw pomaga inżynierom, operatorom i zespołom projektowym wybrać odpowiedni pojazd do danego zadania.
SRV-8 MDV firmy Oceanbotics
Typy ROV według klas
Mini ROV
Znane również jako: Micro ROVs, Small ROVs, Eyeball-class ROVs
Mini ROV to kompaktowe, przenośne systemy przeznaczone głównie do inspekcji wizualnej w środowiskach ograniczonych, płytkich lub o niskim ryzyku. Są one często obsługiwane z małych statków, pontonów, a nawet lokalizacji na lądzie i mogą być szybko rozmieszczane przy minimalnej liczbie załogi i infrastruktury. Opcje ładowności są zazwyczaj ograniczone do kamer, świateł i podstawowego sonaru. Mimo to ich niski koszt i łatwość użytkowania sprawiają, że są popularne na śródlądowych drogach wodnych, w akwakulturze, podstawowych kontrolach kadłuba i szybkich ocenach.
Roboty ROV klasy obserwacyjnej
Znane również jako: ROV obserwacyjne, ROV inspekcyjne, ROV klasy inspekcyjnej, ROV klasy badawczej
Nurkowie inspekcyjni zajmują środkowy poziom możliwości. Są większe i bardziej wydajne niż mini systemy, oferując lepszą stabilność, wyższą jakość obrazowania i możliwość integracji czujników, takich jak sonar wielowiązkowy, skanery laserowe i pomoce pozycjonujące.
Są one szeroko stosowane do inspekcji strukturalnych, monitorowania środowiska i zadań badawczych, które wymagają szczegółowej świadomości sytuacyjnej, ale nie wymagają ciężkich narzędzi interwencyjnych. Warianty skonfigurowane pod kątem pomiarów mogą wspierać metrologię, mapowanie dna morskiego lub prace batymetryczne.
Roboty ROV klasy roboczej
Pojazdy klasy roboczej są przeznaczone do wymagających misji morskich, w których ładowność, stabilność i moc mają kluczowe znaczenie. Działają na większych głębokościach, obsługują wiele manipulatorów i integrują zaawansowane systemy sterowania oraz ciężkie oprzyrządowanie.
Lekkie pojazdy ROV klasy roboczej
Znane również jako: ROV klasy użytkowej, ROV klasy średniej
Lekkie platformy klasy roboczej wypełniają lukę między pojazdami inspekcyjnymi i w pełni interwencyjnymi. Oferują większy ciąg, ulepszone opcje ładowności i ograniczone możliwości oprzyrządowania, dzięki czemu nadają się do ogólnych prac użytkowych, lekkiego wsparcia budowlanego i bardziej złożonych inspekcji.
Ciężkie pojazdy ROV klasy roboczej
Znane również jako: Ciężkie roboty ROV, Roboty ROV klasy budowlanej
Systemy klasy ciężkiej są przeznaczone do interwencji i budowy w głębokim i trudnym środowisku morskim. Są one wyposażone w podwójne manipulatory, narzędzia hydrauliczne, systemy tnące, narzędzia dynamometryczne i specjalistyczne interfejsy podmorskie. Pojazdy te są standardem w programach związanych z ropą i gazem, morską energią wiatrową i budownictwem podwodnym.
Rodzaje ROV według zastosowania
Podczas gdy klasa opisuje platformę, zastosowanie opisuje konfigurację misji. Pojedynczy pojazd może często pełnić wiele ról, zamieniając ładunki i narzędzia.
Zdalnie sterowany pojazd REVOLUTION firmy Deep Trekker
Interwencyjne pojazdy ROV
Skonfigurowane do fizycznej interakcji ze sprzętem podwodnym – obsługa zaworów, wkładanie narzędzi, podłączanie węży i wspomaganie napraw. Powszechnie wyposażone w manipulatory, narzędzia dynamometryczne i interfejsy hydrauliczne.
Konstrukcyjne pojazdy podwodne
Wspierają instalację i uruchomienie struktur podwodnych, wspomagając operacje dźwigowe, kierując rozmieszczeniem, monitorując wyrównanie i przeprowadzając kontrole końcowe.
IRM ROV (inspekcja, naprawa i konserwacja)
Optymalizują długoterminowe zadania związane z integralnością aktywów. Łączą w sobie wysokiej jakości narzędzia inspekcyjne z manipulatorami i możliwością lekkiej interwencji.
Roboty ROV do wykopów
Przeznaczone do cięcia lub fluidyzacji materiału dna morskiego w celu tworzenia wykopów pod kable i rurociągi. Często wyposażone w systemy cięcia strumieniowego lub mechanicznego.
ROV do zakopywania kabli / rurociągów
Specjalistyczne pojazdy, które zmieniają położenie lub zakopują zasoby po instalacji. Mogą podążać wyznaczoną trasą i zapewniać odpowiednią głębokość zakopania w celu ochrony.
Holowane pojazdy ROV
Pojazdy hydrodynamiczne są ciągnięte za statkiem. Idealne do badań sonarowych i obrazowania na dużym obszarze, gdzie wytrzymałość i zasięg mają pierwszeństwo przed zwrotnością.
Głębinowe / bardzo głębokie pojazdy ROV
Zaprojektowane z myślą o ekstremalnych głębokościach i środowiskach ciśnieniowych. Systemy te koncentrują się na niezawodności, redundancji i specjalistycznych materiałach, aby umożliwić eksplorację naukową i prace przemysłowe na głębokich oceanach.
Naukowe / badawcze pojazdy ROV
Skonfigurowane do pobierania próbek, obserwacji siedlisk i pomiarów oceanograficznych. Zazwyczaj zawierają czujniki naukowe, kosze do pobierania próbek i precyzyjne utrzymywanie stacji.
Kompaktowy pojazd Mission Specialist Ally ROV firmy VideoRay
Pojazdy ROV dla akwakultury
Drony ROV dla akwakultury są wykorzystywane do monitorowania, inspekcji i konserwacji infrastruktury hodowli ryb, w tym sieci, klatek, cum i systemów karmienia. Pomagają one operatorom ocenić stan zasobów, wykryć uszkodzenia lub biofouling oraz zweryfikować integralność cumowania bez kosztów i ryzyka interwencji nurka. Wiele pojazdów ROV skoncentrowanych na akwakulturze priorytetowo traktuje zwrotność, przenośność i jakość kamery, dzięki czemu dobrze nadają się do codziennych operacji hodowlanych i rutynowych kontroli zgodności.
Ratownicze pojazdy podwodne
Używane do wyszukiwania, odzyskiwania i oceny kryminalistycznej wraków lub utraconego sprzętu. Często integrują narzędzia chwytające, pomoce do podnoszenia i obrazowanie o wysokiej szczegółowości.
Roboty ROV do inspekcji rurociągów
Wyposażone w sonar, kamery, lasery i narzędzia śledzące do śledzenia, dokumentowania i oceny stanu podmorskich rurociągów.
Roboty podwodne do inspekcji kabli
Podobne do systemów inspekcji rurociągów, ale zoptymalizowane pod kątem kabli światłowodowych i energetycznych, w tym lokalizacji usterek i weryfikacji zakopania.
Drony do inspekcji obiektów jądrowych
Zaprojektowane dla basenów reaktorów i skażonych środowisk. Kładą nacisk na materiały odporne na promieniowanie, kompaktowe rozmiary i precyzyjną kontrolę.
Wojskowe / przeciwminowe (MCM) pojazdy ROV
Wspierają misje marynarki wojennej, w tym wykrywanie, badanie i neutralizację min, często w niebezpiecznych lub płytkich środowiskach, w których nurkowie nie mogą działać.
ROV do ochrony portów
Port Security ROV wspierają organy ścigania morskiego i władze portowe, umożliwiając szybkie badania podwodne w zatłoczonych, ograniczonych i słabo widocznych środowiskach. Są one wykorzystywane do inspekcji kadłubów statków, pomostów i ścian nabrzeży pod kątem zagrożeń, kontrabandy i problemów strukturalnych bez zakłócania operacji portowych lub narażania nurków na ryzyko. Systemy te często integrują sonar obrazujący, kamery o wysokiej rozdzielczości i opcjonalne narzędzia manipulacyjne w celu dokumentowania ustaleń i wspierania reagowania na incydenty.
EOD ROV
Pojazdy do usuwania niewybuchów i niewypałów przystosowane do zadań podwodnych, umożliwiające zdalną ocenę i bezpieczną obsługę niewybuchów i niewypałów.
Pojazdy ROV do inspekcji rurociągów / wlotów / tuneli
Mogą pracować wewnątrz tuneli wlotowych, zastawek i długich przewodów o ograniczonej widoczności i ograniczonej przestrzeni manewrowej.
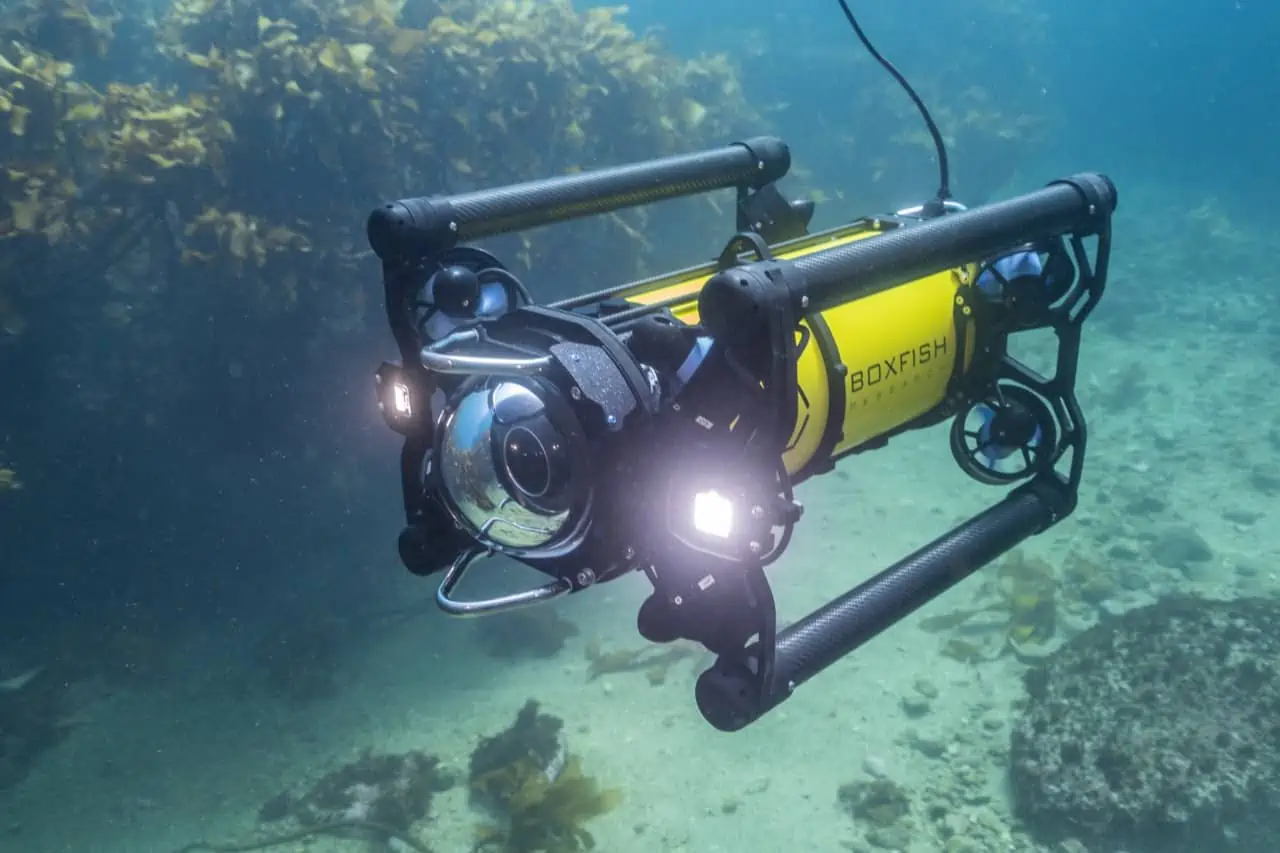
Boxfish ROV firmy Boxfish Robotics
Hybrydowe systemy ROV/AUV
Łączą pracę na uwięzi z trybami autonomicznymi. Mogą wykonywać rozszerzone badania jako pojazdy AUV, a następnie ponownie łączyć się lub działać na uwięzi w celu interwencji.
Rezydentne pojazdy ROV
Pozostają zadokowane pod wodą przez tygodnie lub miesiące, gotowe do wdrożenia na żądanie. Idealne rozwiązanie dla obiektów wymagających częstych inspekcji bez konieczności wielokrotnej mobilizacji statku.
Swobodnie pływające pojazdy ROV (o wydłużonym skoku)
Działają z długimi linami lub systemami TMS, umożliwiając znaczny zasięg boczny od punktu rozmieszczenia.
Pojazdy ROV z systemem TMS (wystrzeliwane z klatki)
Uruchamiane w ramach systemu zarządzania uwięzią (TMS), co poprawia obsługę w głębokich wodach i trudnych prądach, jednocześnie chroniąc główną pępowinę.
Wdrażanie systemów uruchamiania i odzyskiwania (LARS)
Systemy uruchamianiai odzyskiwania (LARS) to specjalnie skonstruowane systemy obsługi, które bezpiecznie rozmieszczają i odzyskują ROV w różnych stanach morza. Typowe konfiguracje obejmują ramy A, dźwigi, wciągarki i kierowane systemy dokowania, które stabilizują pojazd podczas wchodzenia lub wychodzenia z wody. Jednostki LARS są często zintegrowane z systemami zarządzania uwięzią (TMS) w celu ochrony pępowiny i zmniejszenia obciążeń pojazdu, poprawiając bezpieczeństwo, powtarzalność i czas pracy podczas misji morskich.
Normy i kwestie integracji
Wdrażanie podwodnych robotów ROV jest uzależnione od standardów branżowych i najlepszych praktyk związanych z bezpieczeństwem elektrycznym, testami ciśnieniowymi, kompatybilnością elektromagnetyczną i ochroną środowiska. W programach obronnych i rządowych zgodność z odpowiednimi specyfikacjami wojskowymi i morskimi wspiera interoperacyjność i pewność działania. W przypadku użytkowników komercyjnych i badawczych, przestrzeganie uznanych standardów podwodnych wspiera bezpieczne operacje, długowieczność systemu i zgodność z przepisami w różnych środowiskach operacyjnych.
Ponieważ operacje podwodne nadal rozwijają się w dziedzinie energii, obrony, infrastruktury i nauki, zdalnie sterowane pojazdy pozostają podstawową zdolnością w szerszym ekosystemie bezzałogowych systemów podwodnych.