Znajdź dostawców i producentów bezzałogowych pojazdów podwodnych; UUV, AUV, ROV i podwodnych szybowców do zastosowań badawczych, naukowych i wojskowych
Innowacyjne technologie obrazowania podwodnego w wysokiej rozdzielczości oraz technologie zasilania do komercyjnych, naukowych i wojskowych misji badawczych pod wodą
Jeśli projektujesz, budujesz lub dostarczasz Bezzałogowe pojazdy podwodne UUV, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Bezzałogowe pojazdy podwodne, znane również jako bezzałogowe pojazdy podmorskie, to pojazdy zdolne do działania pod wodą bez konieczności fizycznej obecności człowieka w pojeździe. Można je podzielić na dwie główne kategorie – pojazdy zdalnie sterowane (ROV) i autonomiczne pojazdy podwodne (AUV).
Autonomiczne pojazdy podwodne AUV
Autonomiczne pojazdy podwodne są w stanie funkcjonować bez sterowania w czasie rzeczywistym przez operatora. Można je zaprogramować do zbierania danych wzdłuż z góry ustalonej trasy, a niektóre z nich są w stanie podejmować decyzje i potencjalnie zmieniać parametry misji w zależności od otrzymanych danych.
Ze względu na tłumienie fal radiowych w wodzie, pojazdy AUV nie mogą polegać na bezpośredniej nawigacji GPS po zanurzeniu. Do oszacowania pozycji można wykorzystać nawigację zliczeniową, chociaż błędy szybko się kumulują. To oszacowanie pozycji można dodatkowo poprawić dzięki dodatkowym danym z podwodnych transponderów akustycznych, pozycjom GPS pobliskich punktów odniesienia na powierzchni lub tymczasowemu wynurzeniu w celu ustalenia pozycji GPS. Szacunkowe wartości przyspieszenia i prędkości można obliczyć za pomocą inercyjnego systemu pomiarowego (IMU) i poprawić za pomocą dopplerowskiego logu prędkości, urządzenia podobnego do sonaru, które mierzy prędkość przemieszczania się po dnie morskim.
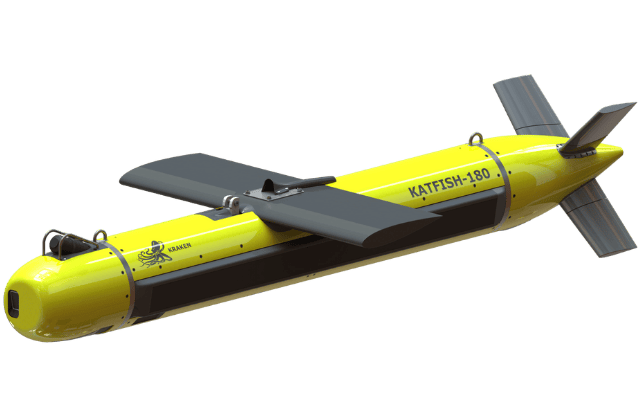
Phantom 2 UUV/AUV firmy Dynautics
Metody napędu dla pojazdów AUV
Najpopularniejszymi metodami napędu dla pojazdów AUV są silniki śrubowe i dysze Korta, zazwyczaj napędzane silnikami elektrycznymi. Pojazdy AUV mogą również „ślizgać się” po wodzie – zmieniając wyporność, podwodne szybowce są w stanie zmieniać swoją głębokość i wykorzystują skrzydła aerodynamiczne do przekształcania tego ruchu w ruch do przodu.
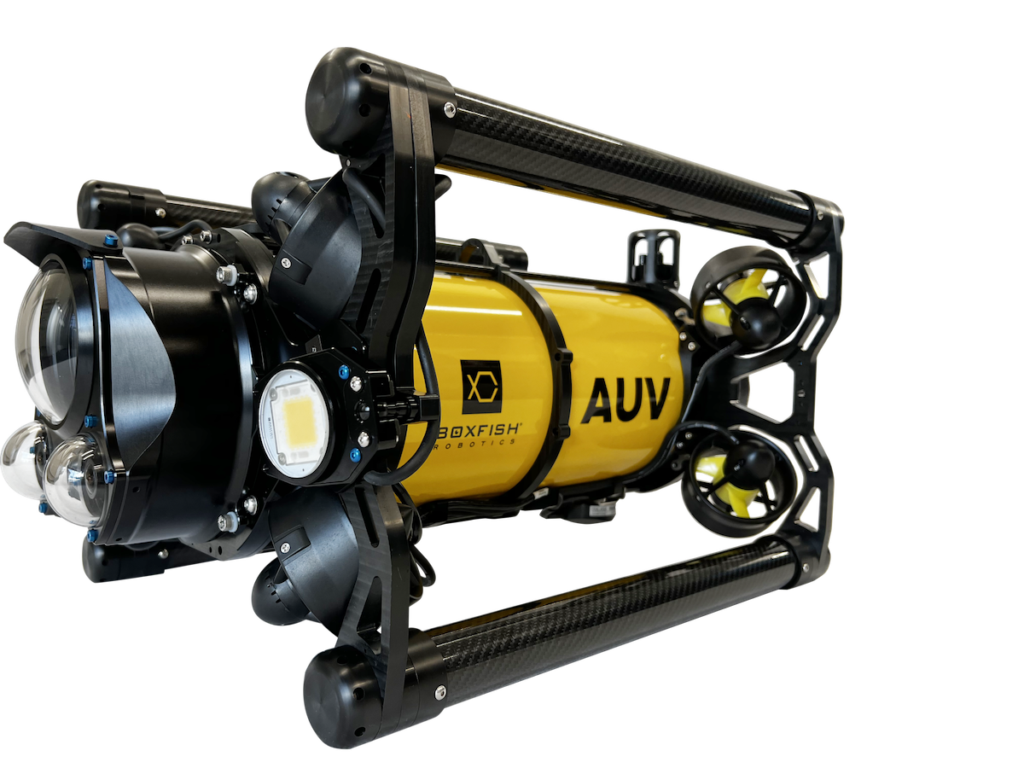
ecoSUBm-Power+ v2 AUV firmy ecoSUB Robotics
Pojazdy podwodne AUV są szeroko stosowane w przemyśle naftowym i gazowym oraz w badaniach naukowych. Wykorzystuje się je również w zastosowaniach związanych z obroną morską, takich jak wykrywanie min, dostarczanie ładunków i nadzór. Wojskowe pojazdy podwodne AUV zostały połączone w sieć z bezzałogowymi statkami powietrznymi (UAV) w celu zapewnienia międzydomenowego rozwiązania ISR (wywiad, nadzór i rozpoznanie) na polu walki.
W przeciwieństwie do AUV, ROV nie są w stanie funkcjonować bez sterowania w czasie rzeczywistym przez operatora. ROV zostały opracowane w celu pokonania ograniczeń nurków i pojazdów nurkowych obsługiwanych przez ludzi. Są one zdalnie sterowane przez załogę znajdującą się na pokładzie pobliskiego statku i połączone z bazą operacyjną za pomocą przewodu, który zapewnia zarówno połączenie, jak i zasilanie, komunikację i przesyłanie danych. ROV działające w głębszych lub bardziej wzburzonych wodach są również wyposażone w system zarządzania linką (TMS), który reguluje długość linki, aby zminimalizować wpływ oporu podwodnego na kabel.
ROV można podzielić na różne klasy w zależności od ich wielkości, masy lub funkcji. Istnieje kilka różnych systemów klasyfikacji.
Pojazdy klasy obserwacyjnej lub inspekcyjnej
Najmniejsze pojazdy ROV są często nazywane pojazdami klasy obserwacyjnej lub inspekcyjnej, z których najprostsze mogą być wyposażone tylko w jedną kamerę. Bardziej zaawansowane pojazdy tej klasy mogą być również wyposażone w sonar i inne czujniki. Typowa głębokość operacyjna może wynosić od kilkuset do kilku tysięcy stóp, w zależności od wielkości pojazdu.
Pojazdy ROV klasy roboczej
Na drugim końcu spektrum znajdują się pojazdy klasy roboczej. Są one wyposażone w pompę hydrauliczną, która zapewnia dodatkową moc potrzebną do zasilania dodatkowego sprzętu i napędu na większych głębokościach.
Pojazdy klasy roboczej mogą obsługiwać bardziej wydajny sprzęt, taki jak manipulatory i kładki kablowe. Pojazdy tej klasy zostały zaprojektowane do pracy na głębokościach do 30 000 stóp, a nawet większych.