Underwater Communication Systems for UUVs and Subsea Operations
Category Presented by
Underwater communication systems enable effective data exchange between unmanned underwater vehicles (UUVs), remotely operated vehicles (ROVs), and other marine systems. These technologies support critical subsea operations including navigation, command and control, real-time data transmission, and collaboration among autonomous platforms. Given the challenges of signal propagation in aquatic environments, underwater communications have evolved into a complex field integrating multiple technologies such as acoustic, optical, and magnetic induction systems.
If you design, build or supply Underwater Communication Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
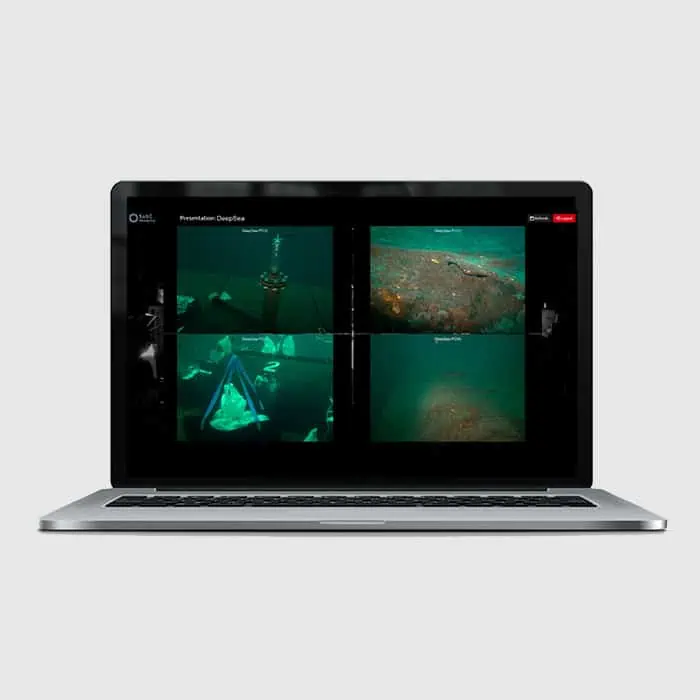
Live-streamed video & audio for subsea inspection & piloting
Live-streamed video & audio for subsea inspection & piloting
...ice for remote underwater and offshore inspections and monitoring allows you to easily broadcast... ... wide range of underwater cameras and DVRs, and allows real-time synchronization with other offshore...
Unlike terrestrial or aerial environments, water severely limits the propagation of electromagnetic waves. Traditional radio-frequency (RF) communications suffer extreme attenuation underwater, making them ineffective for most marine applications. As a result, underwater communication relies on alternative modalities that can transmit signals with minimal degradation, such as acoustic waves, light (optical signals), and magnetic induction.
Types of Underwater Communication Systems
Acoustic communication systems
Acoustic communication is the most prevalent method for long-range underwater wireless transmission. These systems operate using sound waves and are well-suited for environments where RF and optical signals are impractical. UUVs and AUVs typically integrate acoustic modems paired with electroacoustic transducers, which convert digital signals into sound waves and vice versa.
Underwater communication system by Exail
Key components of acoustic communication systems:
Acoustic modems – Digital interfaces that encode and decode signals for underwater transmission.
Acoustic transducers – Devices that emit and receive acoustic waves. These can include piezoelectric and electroacoustic types.
Directional arrays – Enable focused, long-range communication for greater clarity and reduced interference.
Advantages of acoustic communication systems:
Long-range communication capabilities (up to several kilometers).
Penetrates turbid and complex underwater environments.
Well-established with a wide range of commercial and military implementations.
Disadvantages of acoustic communication systems:
Low data rates compared to optical systems.
High latency due to the slow speed of sound in water.
Susceptible to environmental noise, multipath distortion, and signal fading.
While acoustic systems are effective over long distances (up to tens of kilometers), they are limited by low bandwidth, signal latency, and vulnerability to environmental noise. These drawbacks are critical considerations for real-time or data-heavy operations.
Optical communication systems
Underwater optical communication utilizes high-frequency light, typically through laser diodes or high-power LEDs. These systems offer high data rates and low latency, making them ideal for short-range applications such as transmitting data from subsea sensors to nearby UUVs.
Key components of optical communication systems:
Laser diodes or LEDs – Emit light signals for data transmission.
Photodetectors – Receive incoming optical signals and convert them back into electrical form.
Beam alignment and stabilization mechanisms – Ensure accurate line-of-sight (LOS) communication between moving platforms.
Advantages of optical communication systems:
Very high data rates, suitable for streaming video and bulk data transfer.
Immune to acoustic noise and waterborne vibrations.
Disadvantages of optical communication systems:
Limited range (typically tens of meters), highly dependent on water clarity.
Requires a clear LOS between transmitter and receiver.
Performance degrades rapidly in turbid or particulate-heavy water.
These systems are used in cooperative AUV missions, optical docking, and sensor data retrieval in clear water environments.
Magnetic Induction Systems
Magnetic induction communication operates by generating alternating magnetic fields between transmitting and receiving coils. These systems are resilient to turbidity and salinity changes and offer nearly instantaneous signal propagation.
Key components of magnetic induction systems:
Inductive coils – Create and receive magnetic fields to carry modulated signals.
Signal modulator/demodulator – Processes data for transmission and reception.
Power control unit – Manages energy usage and field strength for optimal communication.
Stable performance in murky water, high salinity, or enclosed environments.
Immune to multipath interference and acoustic background noise.
Disadvantages of magnetic induction systems:
Very short operational range (typically under 10 meters).
Lower data throughput compared to optical systems.
Less mature technology, with fewer commercial solutions available.
However, the extremely short operational range (a few meters) limits its use to specific scenarios such as underwater robotics collaboration and sensor-to-platform communication.
Tethered and Hybrid Communication for ROVs
ROVs often employ tethered communication links, allowing high-bandwidth, real-time data transmission and power delivery. These cables enable precise control and live video feedback during operations such as underwater construction, pipeline inspection, and scientific sampling.
Hybrid systems, which combine tethered links with wireless components, are being developed to improve flexibility and redundancy. Some next-generation ROVs are exploring semi-autonomous operation with occasional wireless communication handshakes to supplement tethered control.
Applications of Underwater Communication Systems
UUV and AUV coordination
UUVs utilize underwater communication to navigate autonomously, share mission data, and operate in collaborative swarms. Secure communication channels are essential for military missions, such as mine detection or anti-submarine warfare, where UUVs may operate in tandem with manned naval assets.
Submarine and naval communication
Advanced acoustic and magnetic systems support communications between submarines and surface vessels or deployed buoys. These systems are optimized for stealth and efficiency and often integrate with tactical networks to deliver encrypted status updates, mission data, or location signals.
Oceanographic data retrieval
Wireless underwater communication enables data collection from static sensors and seafloor nodes without requiring physical retrieval. AUVs can “handshake” with these devices to download recorded environmental data, enhancing long-term monitoring efforts.
Buoy and gateway systems
Floating buoys and gateway nodes act as intermediaries between underwater assets and surface control stations. These nodes translate acoustic or optical signals into RF for satellite or shore transmission, bridging the gap between submerged systems and external networks.
Underwater Communication System Architecture
The architecture of an underwater communication system is tailored to match the operational environment and mission objectives. At its core, each system comprises:
Transmitters and receivers – These may be acoustic transducers, optical emitters and detectors, or magnetic coils.
Signal processors – Responsible for modulation, demodulation, filtering, and error correction.
Power and control modules – Manage energy usage, timing synchronization, and adaptive channel management.
Networking protocols – Custom or standardized protocols (e.g., JANUS) to support multi-node communication in noisy or bandwidth-limited conditions.
Some systems are integrated with navigation and sensing units, forming part of a larger marine autonomy stack. For example, AUVs equipped with underwater communication capabilities often also feature sonar imaging, Doppler velocity logs (DVLs), and inertial navigation systems (INS) to maintain spatial awareness and situational responsiveness.
Environmental and Operational Challenges
Operating beneath the surface introduces a host of unique challenges for underwater communication systems:
Variable propagation conditions – Changes in temperature, salinity, and depth affect signal behavior unpredictably.
Multipath distortion – Reflections off the seafloor or water surface create echoes, requiring sophisticated signal processing to differentiate source data from noise.
Ambient acoustic noise – Natural sounds from marine life and anthropogenic interference from ships can mask weak signals.
Mobility of nodes – Moving platforms introduce Doppler shifts and require dynamic channel adaptation for stable communication.
Effective solutions must balance energy efficiency, link reliability, data throughput, and hardware footprint to meet mission needs. This is especially important for small UUVs operating in battery-constrained conditions or in deep-sea deployments where replacement or recovery is challenging.
Innovation and the Future of Underwater Communication
The field of underwater communication is evolving rapidly in response to growing interest in autonomous marine systems and persistent ocean monitoring. Emerging technologies and research areas include:
Hybrid communication models – Combining acoustic and optical systems to switch dynamically based on range and visibility.
Machine learning-based signal processing – Algorithms that adapt to changing underwater conditions for clearer, more resilient communications.
Miniaturized, low-power systems – Enabling extended missions with smaller UUVs, drones, and sensor buoys.
Underwater 5G* and mesh networks – Exploring concepts for subsea “Internet of Things” deployments, where multiple platforms continuously share data and coordinate activities in real time.
Multi-domain operations, where underwater, surface, and aerial systems interact seamlessly, will likely expand in the future. Underwater communication will play a vital role in enabling this interoperability, linking subsea assets to broader operational networks through satellite and RF gateways.
* extension of 5G and terrestrial mobile services
The Importance of Underwater Communication Systems
Underwater communication systems enable the expanding ecosystem of unmanned marine technologies. From tethered ROVs performing industrial inspection tasks to autonomous UUV fleets executing surveillance or scientific missions, effective subsea communication allows platforms to share data, collaborate intelligently, and respond dynamically to environmental changes.
Technologies ranging from long-range acoustic links to high-speed optical bursts and precise magnetic handshakes allow for flexible, context-specific communication strategies. The rise of intelligent, modular underwater systems demands communication infrastructure that is not only robust and secure but also scalable and interoperable.
As the capabilities and deployment scenarios of unmanned systems continue to grow, so too will the demand for advanced underwater communication systems capable of supporting the full spectrum of modern marine operations.
Teledyne Marine has introduced the BlueStreamX2, a new enhancement which doubles the data rate of Benthos Acoustic Modems without affecting their communication range
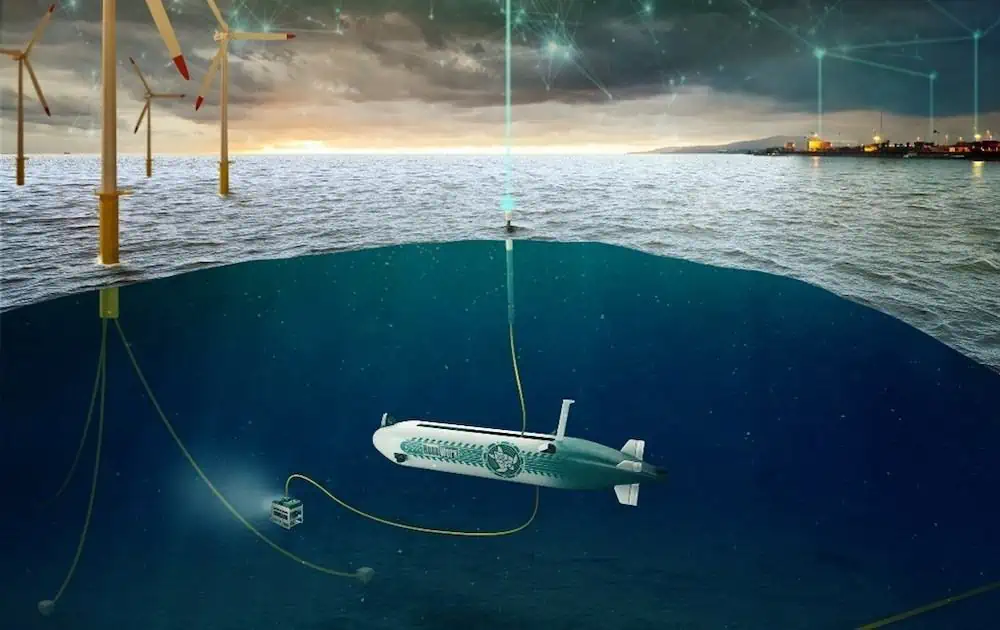
Cellula Robotics’ Solus-XR will play a vital role in showcasing HonuWorx’s Loggerhead concept, a pioneering approach that utilizes an XLUUV as a mobile power and communication hub for Light Work Class ROVs and AUVs
RS Aqua has been named as the UK reseller for the new Origin 600 ADCP - the first ADCP to include an integrated acoustic modem and advanced onboard Edge processing
CSignum’s RadiEM Modem is the first and only platform using electromagnetic fields to connect networks above the water with digital devices under water, without cables
Available for RTS customers globally, Exail's Gaps M5 addresses accuracy and performance needs, and requirements for vertical and horizontal tracking applications
Greensea Systems’ collaboration with SeeByte is continuing to push the future of ocean robotics forward towards tetherless ROVs with seafloor to operations center communication and control
Jan 19, 2023
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.