Exail explains the use of its DriX USV in the OECI technology challenge, which is designed to test collaborative capabilities of multiple uncrewed vessels for ocean exploration expeditions, with the aim of increasing the pace and finding ways of improving exploration efficiency.
OECI is a partnership between The University of Rhode Island, The Ocean Exploration Trust (OET), The University of Southern Mississippi, the University of New Hampshire (UNH), Woods Hole Oceanographic Institution (WHOI) and primary funding partner National Oceanic and Atmospheric Administration (NOAA) Ocean Exploration.
The OECI Technology Challenge took place on 6-22 May 2022 in the Pacific Ocean. The aim of the Challenge was to develop approaches to having multiple uncrewed vehicles communicate and collaborate with each other, improving the efficiency of operations and expanding the exploration footprint. The challenge was also to find out if it was possible to adjust the mission of a robotic vehicle well away from the mothership.
Until now, an expedition would typically conduct only one science operation at a time. Even when it was possible to embark several vehicles on the mother ship, only one vehicle could be operated at a time, and the mothership had to suspend mapping operations in order to deploy a vehicle. The expedition set out to send robots on simultaneous, independent missions while the mothership carries on performing its own mapping operations.
Four vehicles were showcased in the Challenge:
- UNH’s Uncrewed Surface Vessel, DriX
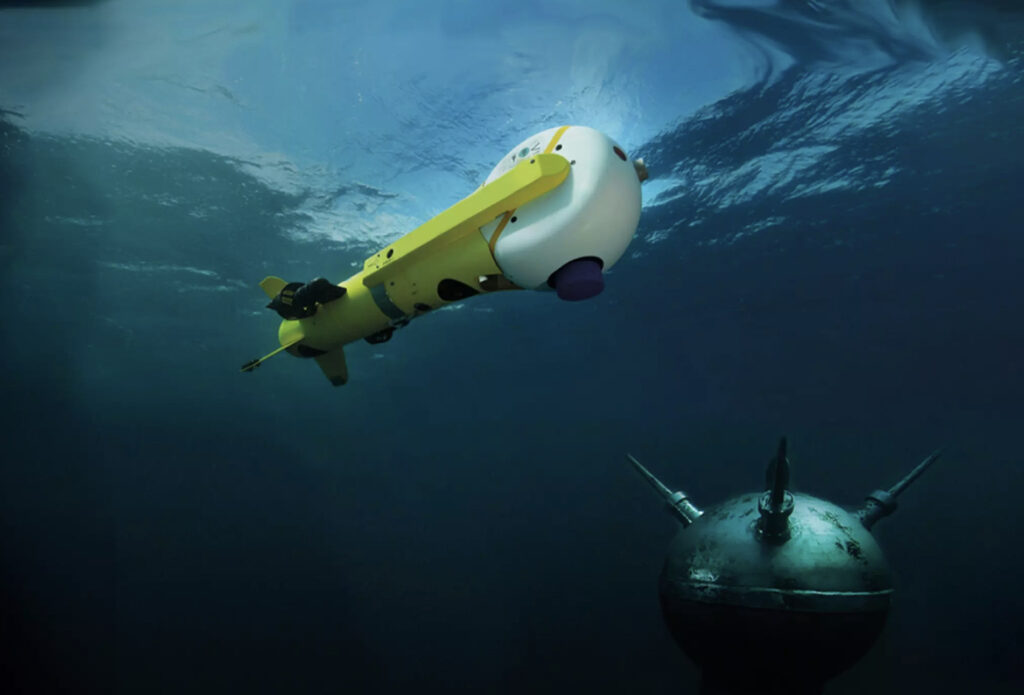
- WHOI’s mid-water slow-moving remotely operated underwater vehicle, Mesobot designed to explore the mesopshere,
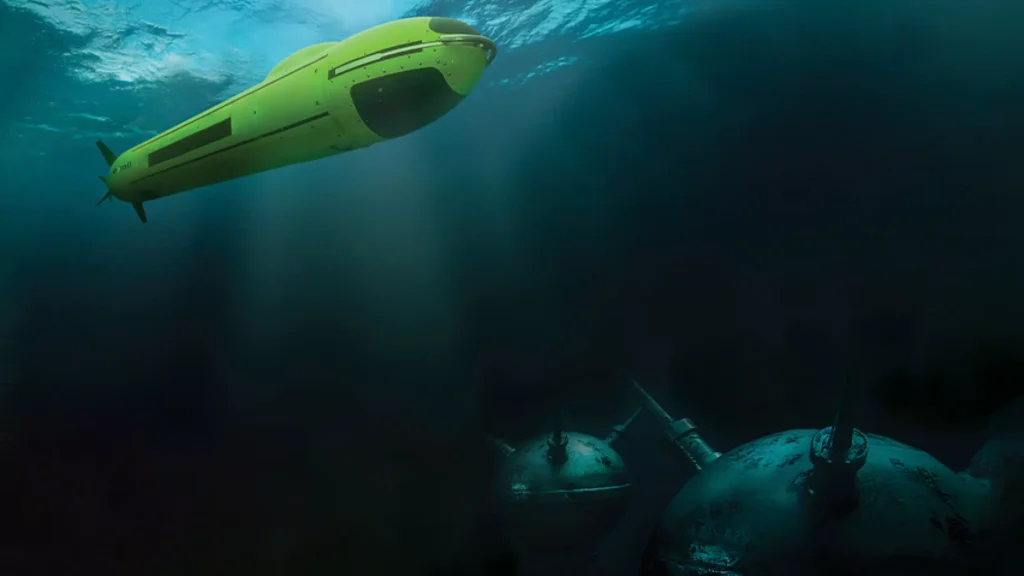
- WHOI’s remotely operated hybrid vehicle Nereid Under-Ice, NUI, which has a fiber optic cable allowing it to act as a standard ROV as well as an AUV if the fiber optic cable breaks
- OET E/V Nautilus, the main research platform
With all these robots embarking on the E/V Nautilus, the real challenge was to have these vehicles in the water at the same time and have them communicate with each other, when they didn’t all have the same protocols. Teams wanted to check these communications means, opening up the possibility of multi vehicle tracking and positioning.
Exploring vast areas in a single mission becomes reality
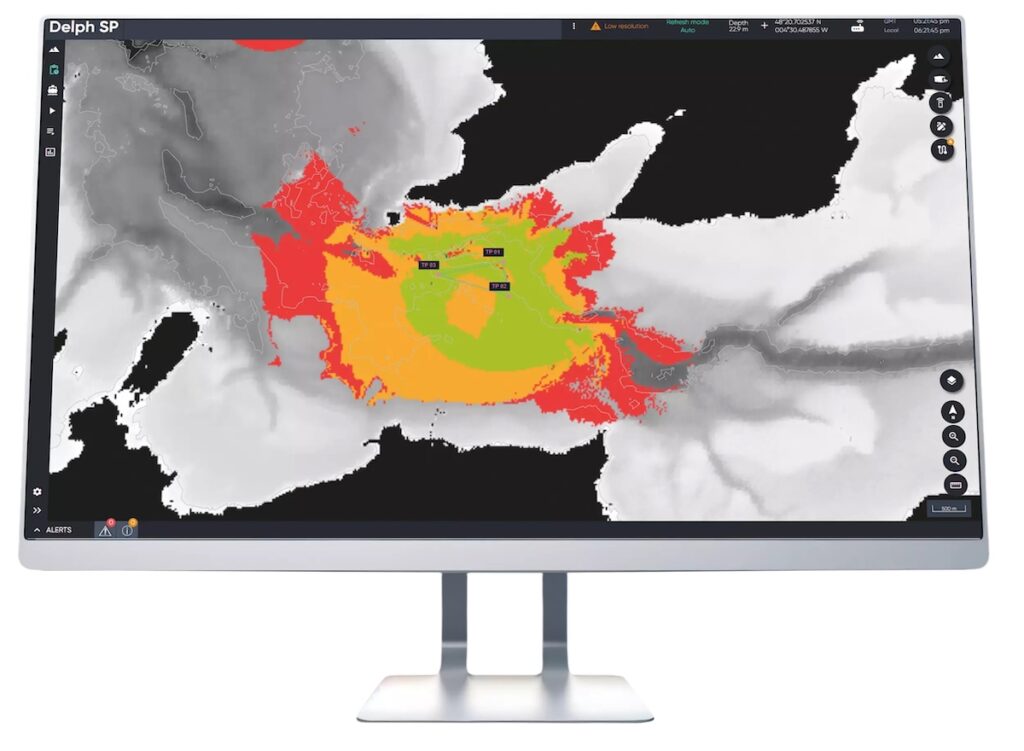
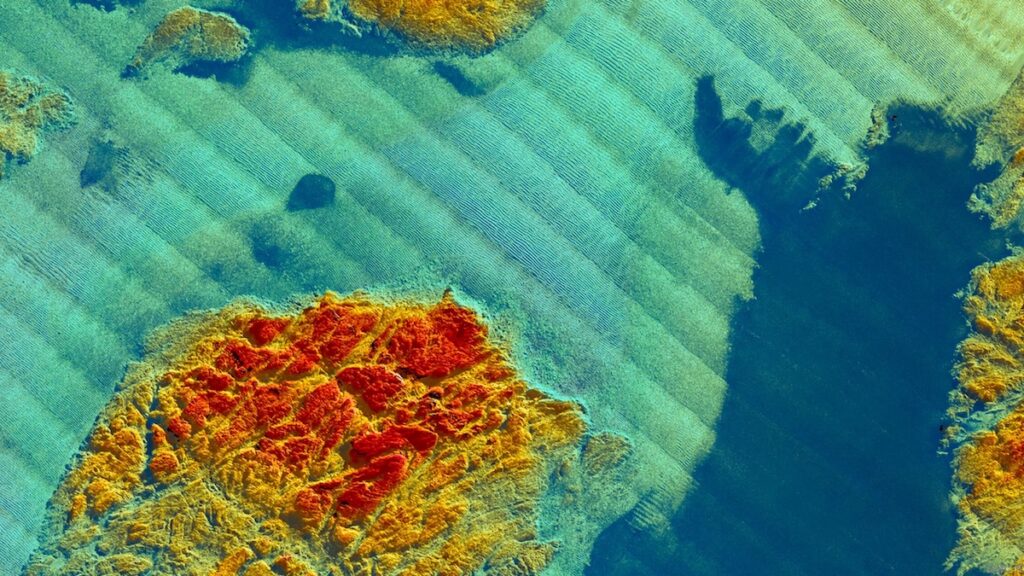
The DriX USV was launched on its own to map the water column to track diurnal migration of the deep scattering layer. To do this DriX used its Kongsberg EK80 multibeam echosounder within its gondola, 2 m below the hull and thus clear of wave activity and bubbles, the necessary conditions for optimum data acquisition. DriX’s Marine Broadband Radio enables it to send data in real time to E/V Nautilus up to 20 km away. The MBR allows the ship and DriX to sail far from each other and carry out mapping in different areas simultaneously, multiplying the size of the area they can cover in a given timeframe. Once DriX identifies a target during its mapping operations, Mesobot AUV is sent to the target to sample the migration. DriX is able to track, monitor and even re-task Mesobot by circling above it, maintaining its acoustic communication with real-time data links established between them. DriX acts as an ‘aircraft control center’ to maintain acoustic communication with Mesobot.
Exail DriX USV mapping the seafloor during the OECI technology challenge
Thanks to this acoustic communication link via a USBL system installed within DriX’s gondola, teams were able to monitor Mesobot’s position in real time and send the information to the display systems onboard Nautilus, giving full situational awareness of both vehicles and the mother ship. DriX can then redirect Mesobot in real-time, from miles away, to new features revealed by DriX and obtain real-time information on water column properties and areas of interest. Thanks to this acoustic communication capability, DriX can also retrieve the data collected by the AUV without having to wait for it to resurface, enabling fast data transmission to the operations center through high-bandwidth communication.
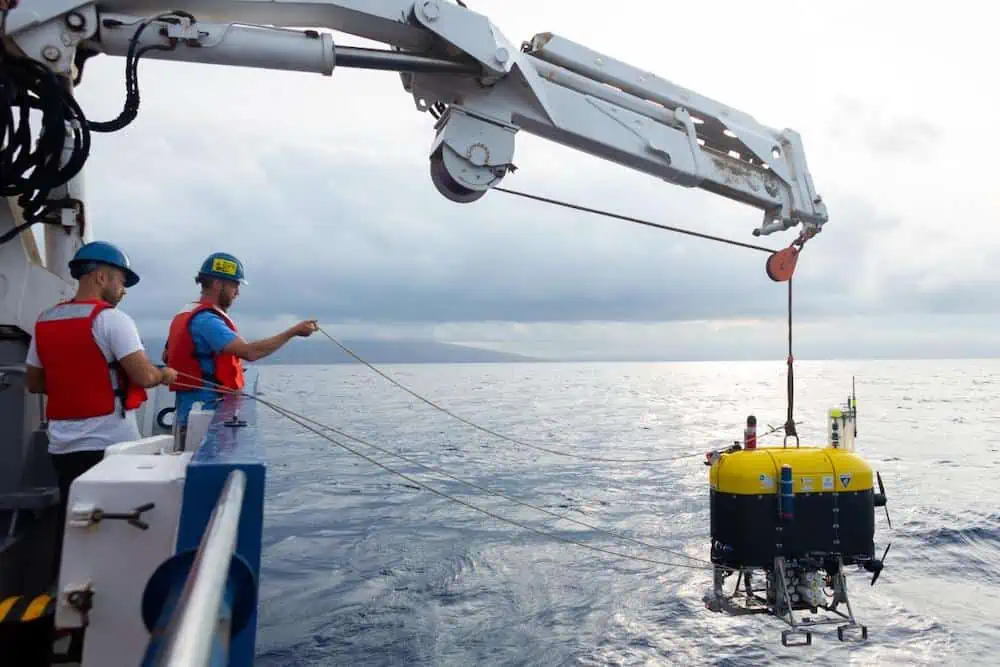
Mesobot team members deploy the vehicle over the edge of the E/V Nautilus
Intelligent collaboration between DriX, Mesobot and NUI
NUI dives down below Mesobot to explore the seabed. When NUI uses its fiber optic tether linking it to Nautilus, DriX acoustically tracks NUI and reports its positions to display systems onboard Nautilus, again offering complete situational awareness to Nautilus crews. As with Mesobot, DriX relays acoustic commands to NUI, and receives acoustic data from it, which it then forwards to the mother ship. When NUI is in full AUV mode and is no longer attached to E/V Nautilus via the tether, freeing it for other missions, DriX provides long-range tracking for NUI, and long-range relay between NUI and Nautilus. So Nautilus can receive real-time data mapping from NUI via DriX without NUI needing to resurface, greatly improving efficiency.

Launch of the NUI vehicle
Expanding mission capabilities
The mission was a great success, exceeding expectations. It illustrates how it is possible to explore seafloor, mid-water and surface simultaneously, leaving the mothership free to perform other mapping tasks and other operations, drastically reducing downtime.
Research teams and oceanographers can use autonomous systems such as the DriX USV in conjunction with manned vessels, multiplying the surface that can be mapped and improving mission efficiency and the amount of data that can be gathered in a minimum of time.
“These technologies are already great on their own but so much more powerful when working together,” said Jason Fahy Expedition Lead, NA1389 Technology Challenge, OECI.
Researchers and engineers alike are eagerly anticipating the endless possibilities that multi-vehicle collaboration offers, taking ocean exploration to a whole new level.