Find manufacturers of Underwater Inspection Robotics for pipeline, subsea, and offshore inspection, including uncrewed subsea inspection vehicles and crawlers for commercial and environmental applications.
If you design, build or supply Underwater Inspection Robotics, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
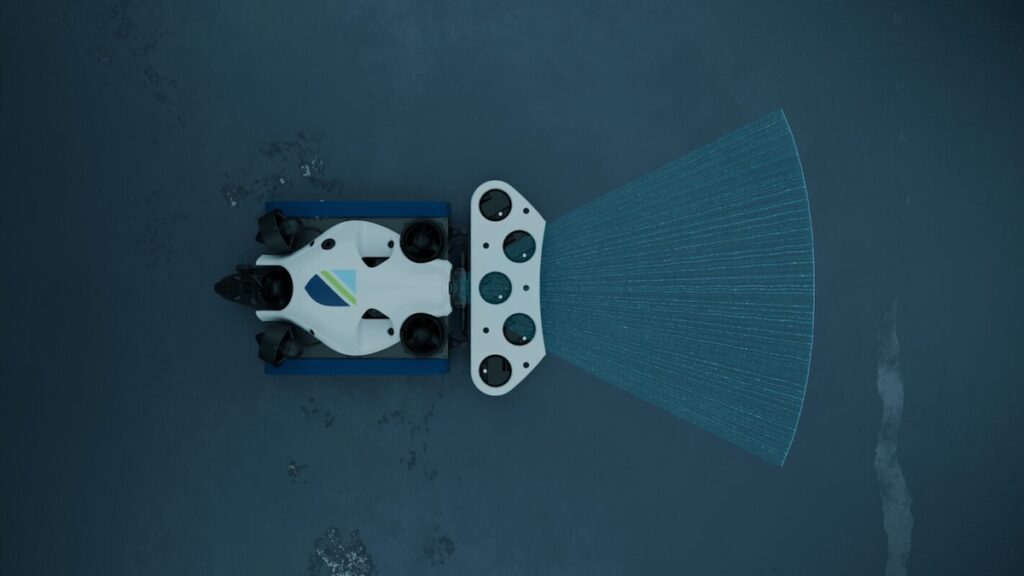
...the autonomous underwater drone revolutionising underwater data collection by eliminating the... ...ty of mapping, inspection and monitoring applications. Incorporating a 4K 60 FPS camera with...
Mission ready with advanced stabilization and payload capabilities.
Mission ready with advanced stabilization and payload capabilities.
...t and flexible underwater capabilities for complex deep ocean missions. It consists of six thrusters... ......anced stabilization allows users to pilot the vehicle precisely underwater, even in high current....
Underwater robotic inspection of structures, vessels and other assets may be carried out by a variety of unmanned systems platforms. This remote controlled or autonomous inspection work may be faster and more efficient than deploying a team of human divers or personnel on board a vessel, or may save manned teams some time by identifying key areas to be inspected more closely. Unmanned vehicles such as USVs (uncrewed surface vessels) and UUVs (unmanned underwater vessels) may also be able to access areas that are too remote, difficult or hazardous for divers or manned vessels.
Apache4 ASV by CHC Navigation
Underwater Inspection with USVs
USVs may be used to inspect the below-waterline sections of critical structures such as bridges, dams, sea walls and flood defenses, and oil and gas pipelines. These vessels may be equipped with underwater video cameras as well as side-scan or multibeam sonars for underwater acoustic imaging.
Some USVs can also deploy underwater inspection ROVs (remotely operated vehicles) or other UUVs to perform more detailed inspection.
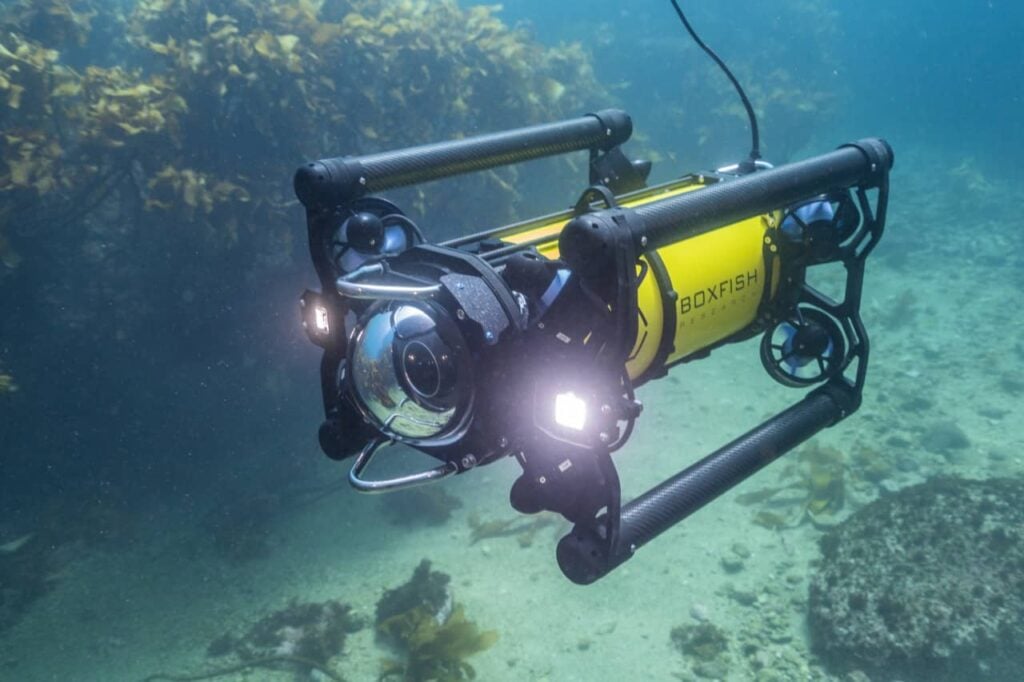
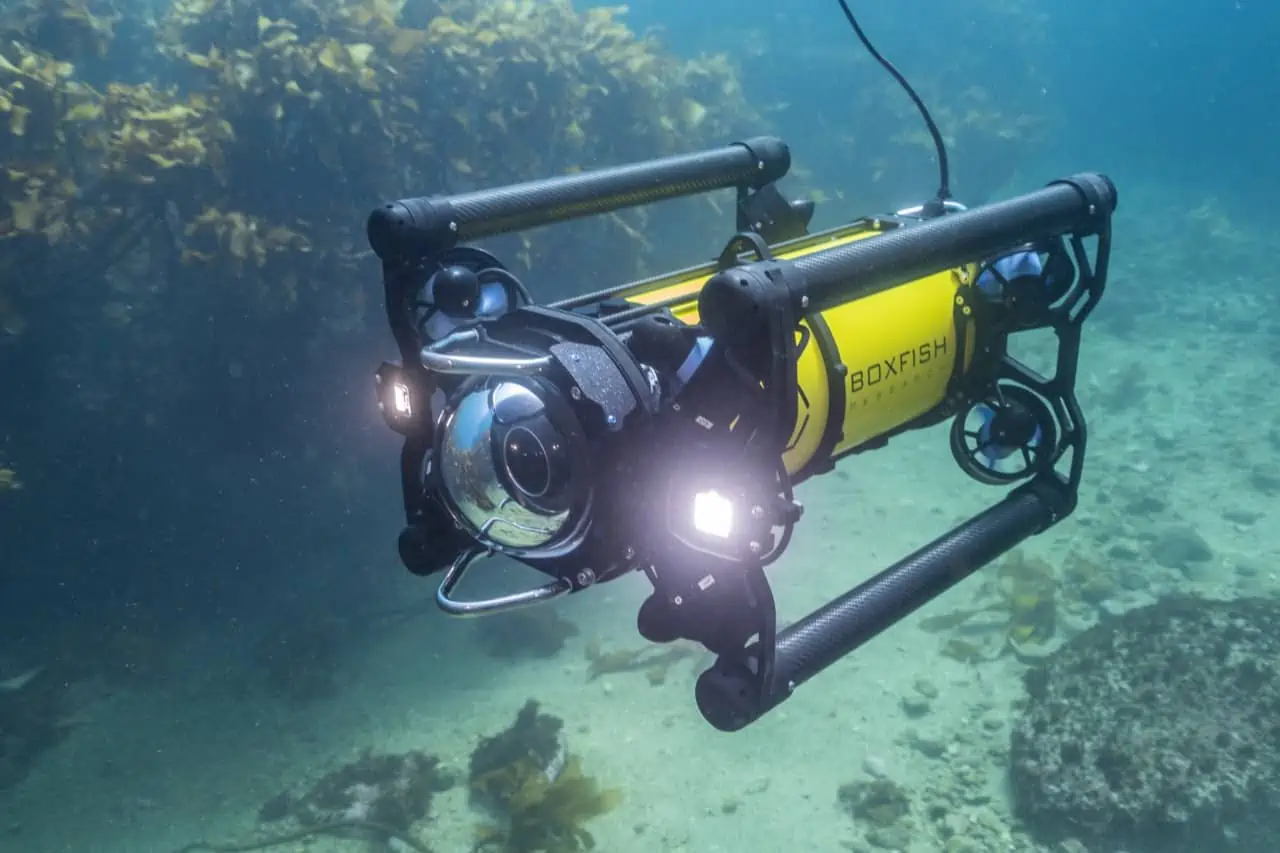
Underwater Inspection Vehicle by Boxfish
ROVs & UUVs for Subsea Inspection
vLBC Hybrid ROV Tracked Crawler by Teledyne Marine
ROVs are commonly used for a variety of offshore and subsea inspection tasks, including oil and gas pipelines and platforms, cables, wind farms, and vessels. ROVs are operated via a tether, typically from a support vessel or the shore, and can be equipped with a variety of tools and payloads including high-definition cameras, floodlights, sonar imagers, and manipulator arms. They can also be fitted with crawler mechanisms that allow them to move over the surface of a ship’s hull.
For more remote inspection capabilities, other UUVs may be used that do not require a tether. Due to the fact that radio waves do not propagate well underwater, directly controlling the vehicle wirelessly over large distances can be challenging, and so these vehicles tend to operate autonomously.
Autonomous Underwater Inspection
AUV Phantom by Dynautics
AUVs (autonomous underwater vehicles) can undertake subsea inspection tasks without remote control, and may use AI (artificial intelligence) and algorithms such as SLAM (simultaneous localization and mapping) to navigate within their environments. They may be capable of staying underwater for long periods of time and gathering large amounts of data that can be processed once the vehicle returns to the surface.
Uncrewed autonomous vessels known as ASVs (autonomous surface vessels) may also be used to carry out inspection work without the need for direct input from an operator.
Project REPARE leverages advanced Deep Trekker ROV technology and aerial photogrammetry to restore native flat oyster populations in Southern Brittany through comprehensive underwater monitoring and assessment
A two-day Aquatic Incident Management Systems training program in South Lake Tahoe, supported by Deep Trekker, provides hands-on instruction in sonar, remotely operated vehicles, and coordinated aquatic search operations
Deep Trekker highlights how Franmarine deploys its ROVs alongside the MarineStream software platform to deliver standardized in-water hull inspections, biofouling management, and UWILD workflows
Greensea IQ has demonstrated autonomous UXO detection using the Bayonet 350 AUGV, towing a sensor sled and collecting high-resolution geophysical data in complex nearshore environments
Oceanbotics introduces a highly portable inspection-class remotely operated vehicle with compact design, single-case deployment, and up to four hours of battery life, expanding access to professional underwater operations
Kraken Robotics’ acquisition of Covelya Group expands its subsea technology portfolio, adding navigation, positioning, and communications capabilities for autonomous underwater and maritime platforms worldwide
Boxfish Robotics' remotely operated vehicle technology enables non-invasive visual surveys in marine protected areas, supporting biodiversity research, rare species detection, and data-driven management of deep and mesophotic marine habitats
Deep Trekker and UNDP equip and train Ukrainian agencies with REVOLUTION ROVs, enabling safe, efficient underwater demining nationwide
Dec 22, 2025
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.