Encontre fabricantes de robótica de inspeção subaquática para inspeção de tubagens, submarina e offshore, incluindo veículos de inspeção submarina não tripulados e rastreadores para aplicações comerciais e ambientais.
Se você projeta, constrói ou fornece Robótica de inspeção subaquática, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Embarcações não tripuladas e robótica para inspeção submarina
A inspeção robótica subaquática de estruturas, embarcações e outros ativos pode ser realizada por uma variedade de plataformas de sistemas não tripulados. Esse trabalho de inspeção controlado remotamente ou autônomo pode ser mais rápido e eficiente do que enviar uma equipa de mergulhadores humanos ou pessoal a bordo de uma embarcação, ou pode economizar tempo para as equipas tripuladas, identificando áreas-chave que devem ser inspecionadas mais de perto. Veículos não tripulados, como USVs (embarcações de superfície não tripuladas) e UUVs (embarcações subaquáticas não tripuladas) também podem ser capazes de aceder a áreas que são demasiado remotas, difíceis ou perigosas para mergulhadores ou embarcações tripuladas.
Apache4 ASV da CHC Navigation
Inspeção subaquática com USVs
Os USVs podem ser usados para inspecionar as secções abaixo da linha de água de estruturas críticas, como pontes, barragens, quebra-mares e defesas contra inundações, e oleodutos e gasodutos. Estas embarcações podem ser equipadas com câmaras de vídeo subaquáticas, bem como sonares de varredura lateral ou multifeixe para imagens acústicas subaquáticas.
Alguns USVs também podem utilizar ROVs de inspeção subaquática (veículos operados remotamente) ou outros UUVs para realizar inspeções mais detalhadas.
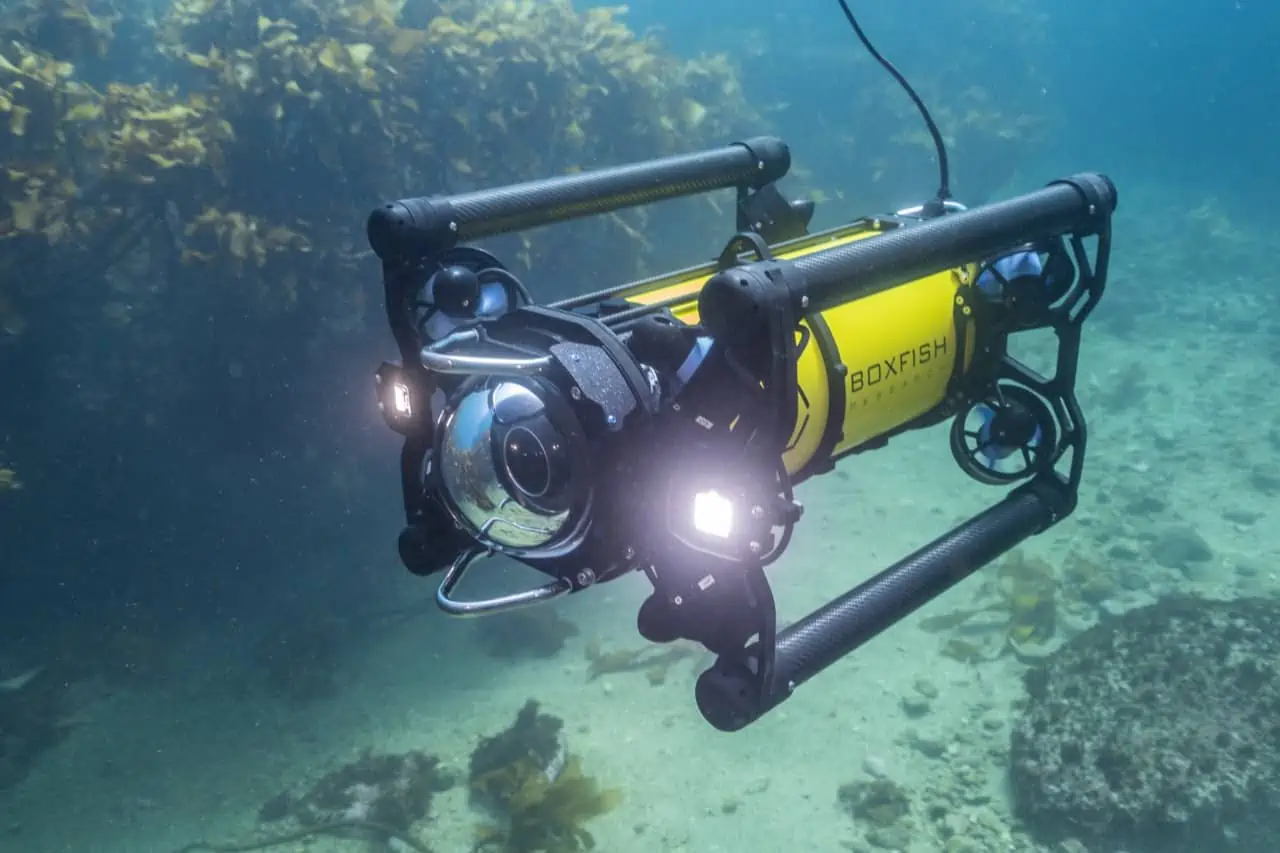
Veículo de inspeção subaquática da Boxfish
ROVs e UUVs para inspeção submarina
vLBC Hybrid ROV Tracked Crawler da Teledyne Marine
Os ROVs são comumente usados para uma variedade de tarefas de inspeção offshore e submarina, incluindo oleodutos e plataformas de petróleo e gás, cabos, parques eólicos e embarcações. Os ROVs são operados por meio de um cabo, normalmente a partir de uma embarcação de apoio ou da costa, e podem ser equipados com uma variedade de ferramentas e cargas úteis, incluindo câmaras de alta definição, holofotes, sonares e braços manipuladores. Também podem ser equipados com mecanismos de esteiras que lhes permitem mover-se sobre a superfície do casco de um navio.
Para capacidades de inspeção mais remotas, podem ser utilizados outros UUVs que não requerem um cabo. Devido ao facto de as ondas de rádio não se propagarem bem debaixo de água, controlar diretamente o veículo sem fios a grandes distâncias pode ser um desafio, pelo que estes veículos tendem a operar de forma autónoma.
Inspeção subaquática autónoma
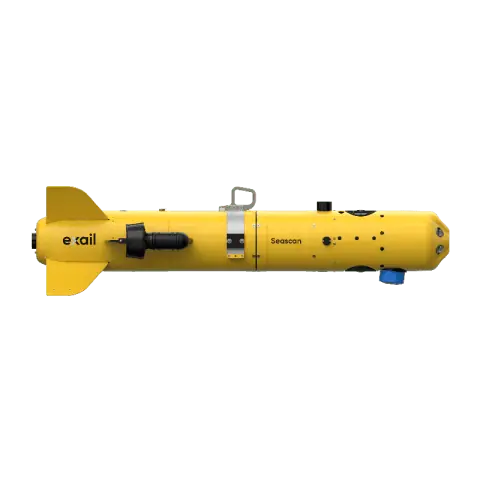
AUV Phantom da Dynautics
Os AUVs (veículos subaquáticos autónomos) podem realizar tarefas de inspeção submarina sem controlo remoto e podem usar IA (inteligência artificial) e algoritmos como SLAM (localização e mapeamento simultâneos) para navegar nos seus ambientes. Podem ser capazes de permanecer debaixo de água durante longos períodos de tempo e recolher grandes quantidades de dados que podem ser processados assim que o veículo regressa à superfície.
Os navios autónomos não tripulados, conhecidos como ASVs (embarcações de superfície autónomas) também podem ser utilizadas para realizar trabalhos de inspeção sem a necessidade de intervenção direta de um operador.
A tecnologia do veículo operado remotamente da Boxfish Robotics permite efetuar levantamentos visuais não invasivos em áreas marinhas protegidas, apoiando a investigação da biodiversidade, a deteção de espécies raras e a gestão baseada em dados de habitats marinhos profundos e mesofóticos