Finden Sie Hersteller von Unterwasser-Inspektionsrobotern für die Inspektion von Pipelines, Unterwasseranlagen und Offshore-Anlagen, einschließlich unbemannter Unterwasser-Inspektionsfahrzeuge und Crawler für kommerzielle und umwelttechnische Anwendungen.
Innovative hochauflösende Unterwasserbildgebung und Energietechnologien für kommerzielle, wissenschaftliche und militärische Unterwasservermessungsmissionen
Wenn Sie entwerfen, bauen oder liefern Unterwasser-Inspektionsrobotik, Erstellen Sie ein Profil, um Ihre Kompetenzen zu präsentieren und mit Besuchern in Kontakt zu treten, die einen konkreten Bedarf an Ihren Lösungen haben.
Unbemannte Fahrzeuge und Robotik für Unterwasserinspektionen
Die Unterwasserinspektion von Strukturen, Schiffen und anderen Anlagen kann mit einer Vielzahl von unbemannten Systemplattformen durchgeführt werden. Diese ferngesteuerten oder autonomen Inspektionsarbeiten können schneller und effizienter sein als der Einsatz eines Teams von Tauchern oder Personal an Bord eines Schiffes oder können bemannten Teams Zeit sparen, indem sie wichtige Bereiche identifizieren, die genauer inspiziert werden müssen. Unbemannte Fahrzeuge wie USVs (unbemannte Oberflächenfahrzeuge) und UUVs (unbemannte Unterwasserfahrzeuge) können möglicherweise auch Bereiche erreichen, die für Taucher oder bemannte Schiffe zu abgelegen, zu schwierig oder zu gefährlich sind.
Apache4 ASV von CHC Navigation
Unterwasserinspektion mit USVs
USVs können zur Inspektion der Unterwasserbereiche kritischer Bauwerke wie Brücken, Dämme, Küstenschutzanlagen und Hochwasserschutzanlagen sowie Öl- und Gaspipelines eingesetzt werden. Diese Fahrzeuge können mit Unterwasservideokameras sowie Seitensicht- oder Multibeam-Sonaren für die akustische Bildgebung unter Wasser ausgestattet sein.
Einige USVs können auch Unterwasser-Inspektions-ROVs (ferngesteuerte Fahrzeuge) oder andere UUVs einsetzen, um detailliertere Inspektionen durchzuführen.
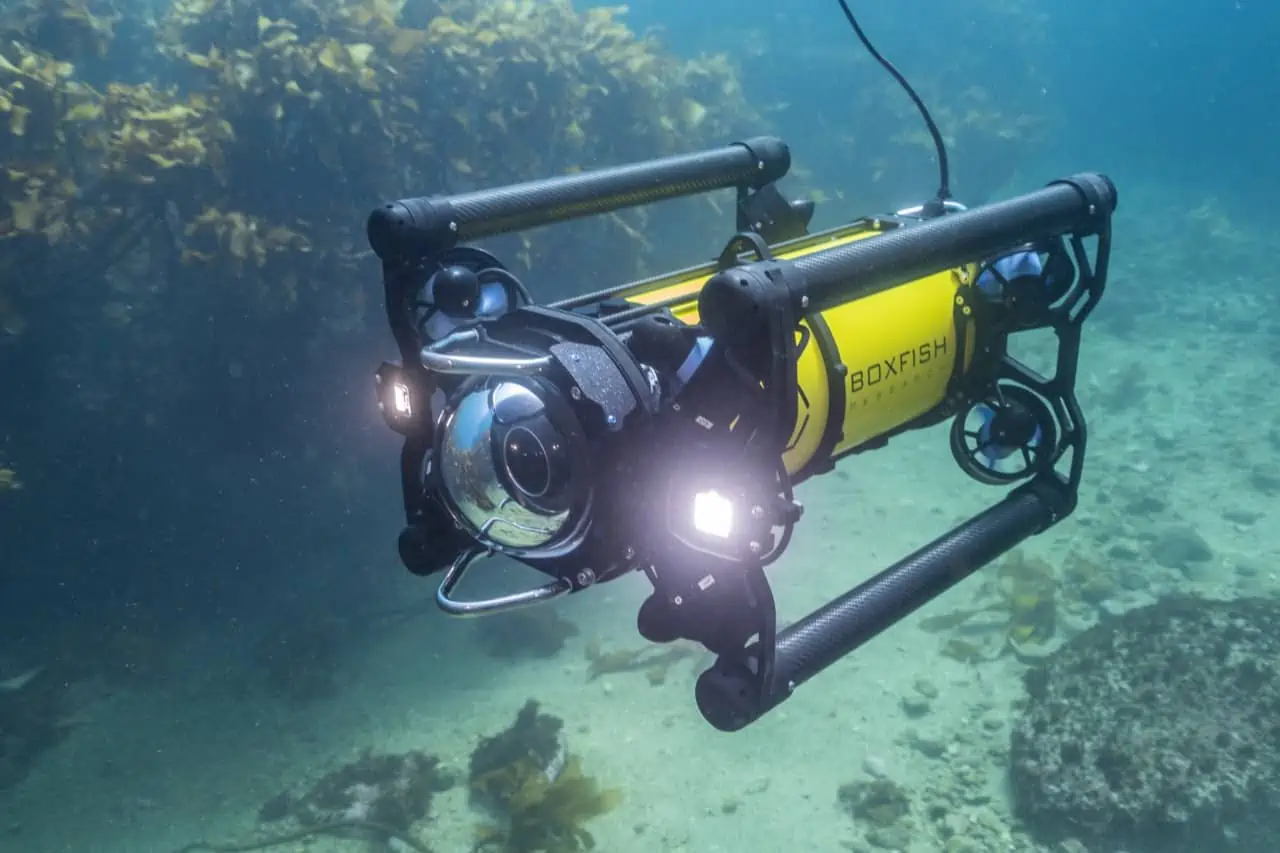
Unterwasser-Inspektionsfahrzeug von Boxfish
ROVs und UUVs für Unterwasserinspektionen
vLBC Hybrid ROV Tracked Crawler von Teledyne Marine
ROVs werden häufig für eine Vielzahl von Offshore- und Unterwasserinspektionsaufgaben eingesetzt, darunter Öl- und Gaspipelines und -plattformen, Kabel, Windparks und Schiffe. ROVs werden über ein Kabel gesteuert, in der Regel von einem Versorgungsschiff oder vom Ufer aus, und können mit einer Vielzahl von Werkzeugen und Nutzlasten ausgestattet werden, darunter hochauflösende Kameras, Scheinwerfer, Sonarbildgeber und Manipulatorarme. Sie können auch mit Raupenmechanismen ausgestattet werden, die es ihnen ermöglichen, sich über die Oberfläche eines Schiffsrumpfs zu bewegen.
Für weitere Ferninspektionsfunktionen können andere UUVs verwendet werden, die keine Verbindung benötigen. Da sich Funkwellen unter Wasser nicht gut ausbreiten, kann die direkte drahtlose Steuerung des Fahrzeugs über große Entfernungen hinweg eine Herausforderung darstellen, weshalb diese Fahrzeuge in der Regel autonom betrieben werden.
Autonome Unterwasserinspektion
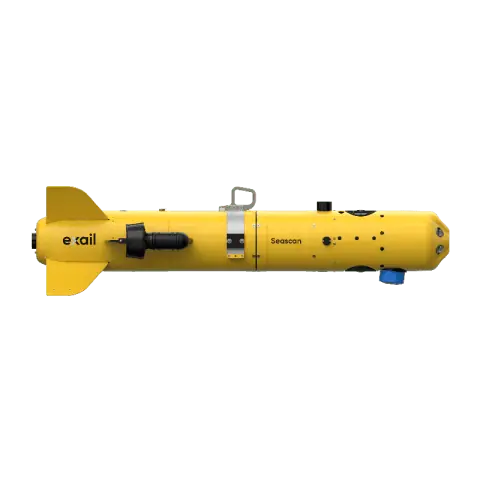
AUV Phantom von Dynautics
AUVs (autonome Unterwasserfahrzeuge) können Unterwasserinspektionen ohne Fernsteuerung durchführen und nutzen möglicherweise KI (künstliche Intelligenz) und Algorithmen wie SLAM (Simultaneous Localization and Mapping) zur Navigation in ihrer Umgebung. Sie können möglicherweise lange Zeit unter Wasser bleiben und große Datenmengen sammeln, die verarbeitet werden können, sobald das Fahrzeug an die Oberfläche zurückkehrt.
Unbemannte Autonome Schiffe, auch bekannt als ASVs (Autonome Überwasserschiffe), können ebenfalls für Inspektionsarbeiten eingesetzt werden, ohne dass eine direkte Eingabe durch einen Bediener erforderlich ist.