Veuillez trouver des fabricants de robots d'inspection sous-marine pour l'inspection des pipelines, des installations sous-marines et offshore, y compris des véhicules d'inspection sous-marine sans équipage et des robots rampants pour des applications commerciales et environnementales.
Technologies innovantes d'imagerie sous-marine haute résolution et d'alimentation électrique pour les missions d'exploration sous-marine commerciales, scientifiques et militaires
Si vous concevez, construisez ou fournissez Robotique d’inspection sous-marine, Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Navires sans équipage et robotique pour l’inspection sous-marine
L’inspection robotique sous-marine des structures, des navires et d’autres actifs peut être effectuée à l’aide de diverses plateformes de systèmes sans pilote. Ce travail d’inspection télécommandé ou autonome peut être plus rapide et plus efficace que le déploiement d’une équipe de plongeurs ou de personnel à bord d’un navire, ou peut faire gagner du temps aux équipes humaines en identifiant les zones clés à inspecter de plus près. Les véhicules sans équipage tels que les USV (navires de surface sans équipage) et les UUV (véhicules sous-marins sans équipage) peuvent également accéder à des zones trop éloignées, difficiles ou dangereuses pour les plongeurs ou les navires avec équipage.
Apache4 ASV par CHC Navigation
Inspection sous-marine à l’aide de navires sans équipage
Les USV peuvent être utilisés pour inspecter les sections sous-marines de structures critiques telles que les ponts, les barrages, les digues et les défenses contre les inondations, ainsi que les oléoducs et les gazoducs. Ces navires peuvent être équipés de caméras vidéo sous-marines ainsi que de sonars à balayage latéral ou multifaisceaux pour l’imagerie acoustique sous-marine.
Certains USV peuvent également déployer des ROV d’inspection sous-marine (véhicules télécommandés) ou d’autres UUV pour effectuer des inspections plus détaillées.
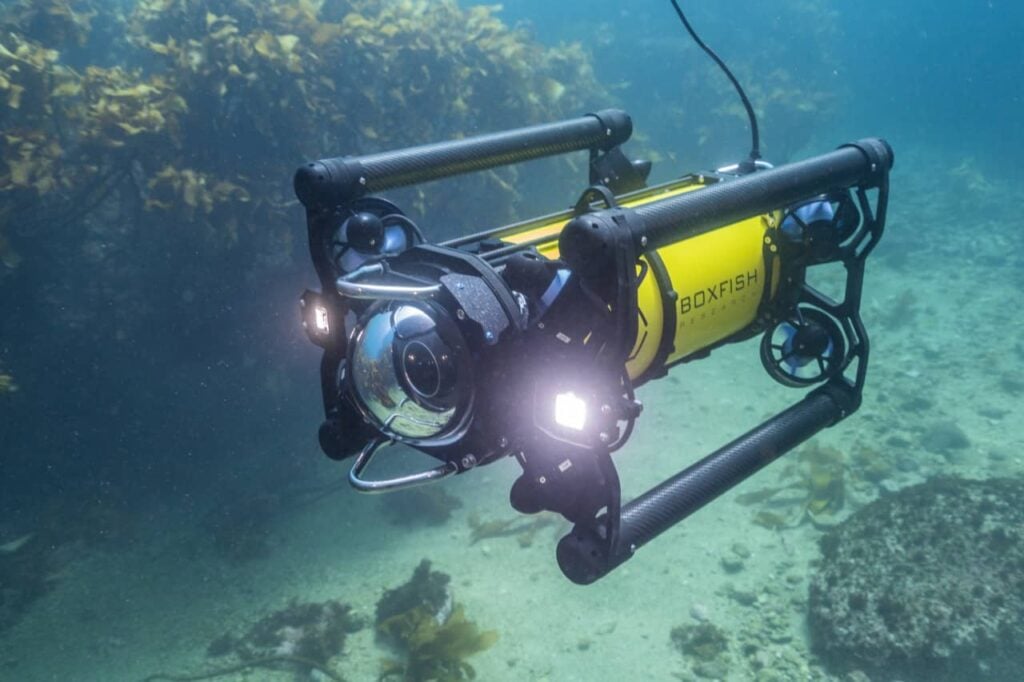
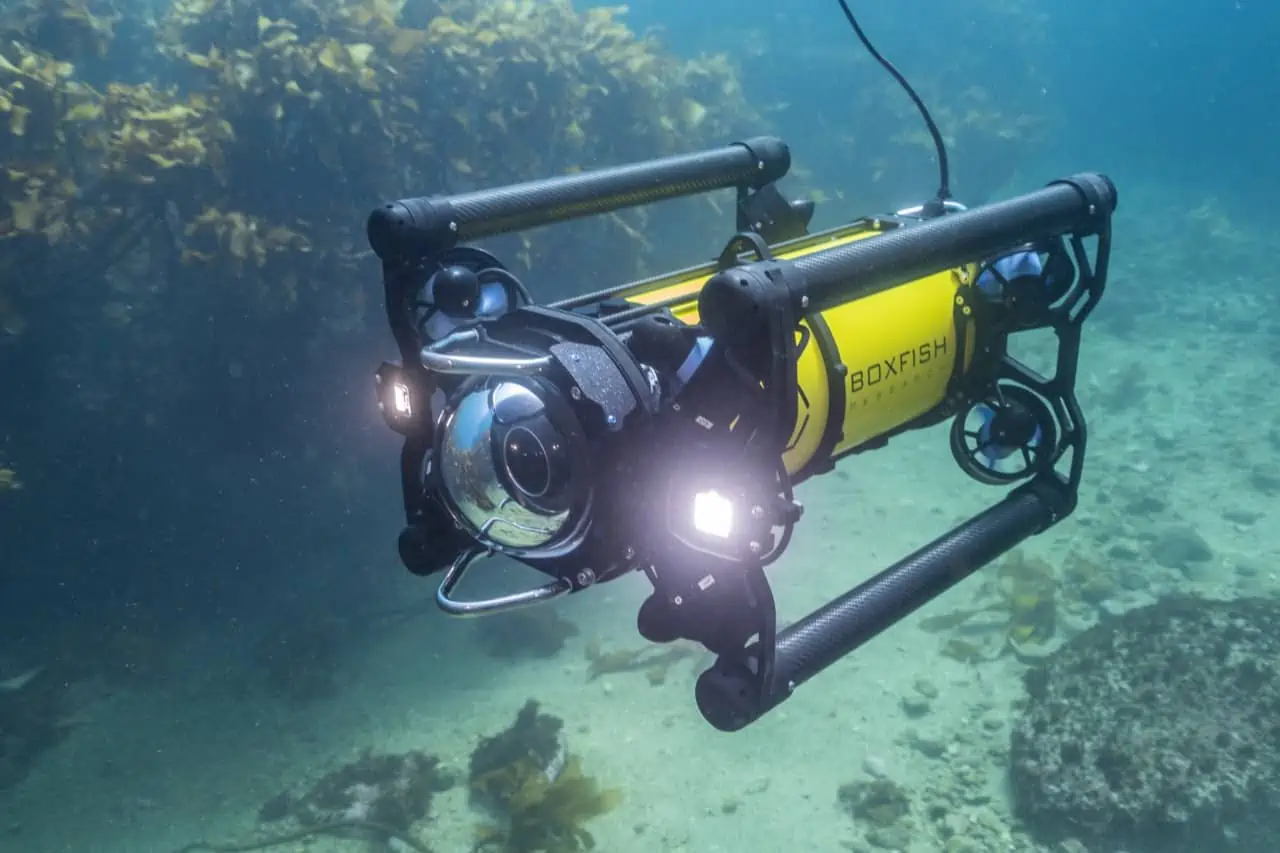
Véhicule d’inspection sous-marine par Boxfish
ROV et UUV pour l’inspection sous-marine
ROV hybride vLBC à chenilles de Teledyne Marine
Les ROV sont couramment utilisés pour diverses tâches d’inspection offshore et sous-marine, notamment les pipelines et les plateformes pétrolières et gazières, les câbles, les parcs éoliens et les navires. Les ROV sont commandés à l’aide d’un câble, généralement depuis un navire de soutien ou depuis le rivage, et peuvent être équipés de divers outils et charges utiles, notamment des caméras haute définition, des projecteurs, des imageurs sonars et des bras manipulateurs. Ils peuvent également être équipés de mécanismes à chenilles qui leur permettent de se déplacer sur la surface de la coque d’un navire.
Pour des capacités d’inspection à distance plus poussées, d’autres UUV ne nécessitant pas de câble peuvent être utilisés. Étant donné que les ondes radio ne se propagent pas bien sous l’eau, il peut être difficile de contrôler directement le véhicule à distance sans fil sur de longues distances. Ces véhicules ont donc tendance à fonctionner de manière autonome.
Inspection sous-marine autonome
AUV Phantom de Dynautics
Les AUV (véhicules sous-marins autonomes) peuvent effectuer des tâches d’inspection sous-marine sans télécommande et peuvent utiliser l’IA (intelligence artificielle) et des algorithmes tels que le SLAM (localisation et cartographie simultanées) pour naviguer dans leur environnement. Ils peuvent rester sous l’eau pendant de longues périodes et collecter de grandes quantités de données qui peuvent être traitées une fois que le véhicule remonte à la surface.
Les navires autonomes sans équipage, appelés ASV (navires de surface autonomes), peuvent également être utilisés pour effectuer des travaux d’inspection sans intervention directe d’un opérateur.
La technologie des véhicules télécommandés de Boxfish Robotics permet d'effectuer des relevés visuels non invasifs dans les zones marines protégées, ce qui favorise la recherche sur la biodiversité, la détection des espèces rares et la gestion fondée sur des données des habitats marins profonds et mésophotiques