Encuentre fabricantes de robótica de inspección submarina para la inspección de tuberías, submarina y en alta mar, incluidos vehículos de inspección submarina no tripulados y rastreadores para aplicaciones comerciales y medioambientales.
Si diseñas, construyes o suministras Robótica de inspección submarina, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
Embarcaciones no tripuladas y robótica para la inspección submarina
La inspección robótica submarina de estructuras, embarcaciones y otros activos puede llevarse a cabo mediante diversas plataformas de sistemas no tripulados. Este trabajo de inspección controlado a distancia o autónomo puede ser más rápido y eficiente que el despliegue de un equipo de buzos humanos o personal a bordo de una embarcación, o puede ahorrar tiempo a los equipos tripulados al identificar las áreas clave que deben inspeccionarse más detenidamente. Los vehículos no tripulados, como los USV (buques de superficie no tripulados) y los UUV (vehículos submarinos no tripulados) también pueden acceder a zonas demasiado remotas, difíciles o peligrosas para los buzos o los buques tripulados.
Apache4 ASV de CHC Navigation
Inspección submarina con USV
Los USV pueden utilizarse para inspeccionar las secciones bajo el nivel del agua de estructuras críticas como puentes, presas, diques y defensas contra inundaciones, así como oleoductos y gasoductos. Estas embarcaciones pueden estar equipadas con cámaras de vídeo submarinas, así como con sonares de barrido lateral o multihaz para la obtención de imágenes acústicas submarinas.
Algunos USV también pueden desplegar ROV de inspección submarina (vehículos operados a distancia) u otros UUV para realizar inspecciones más detalladas.
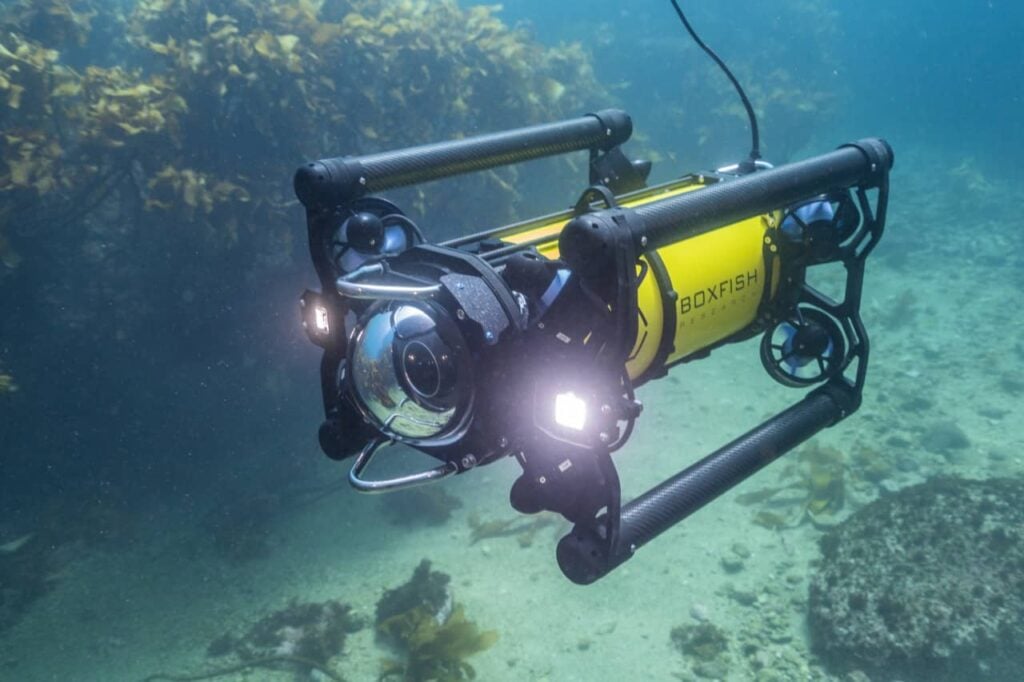
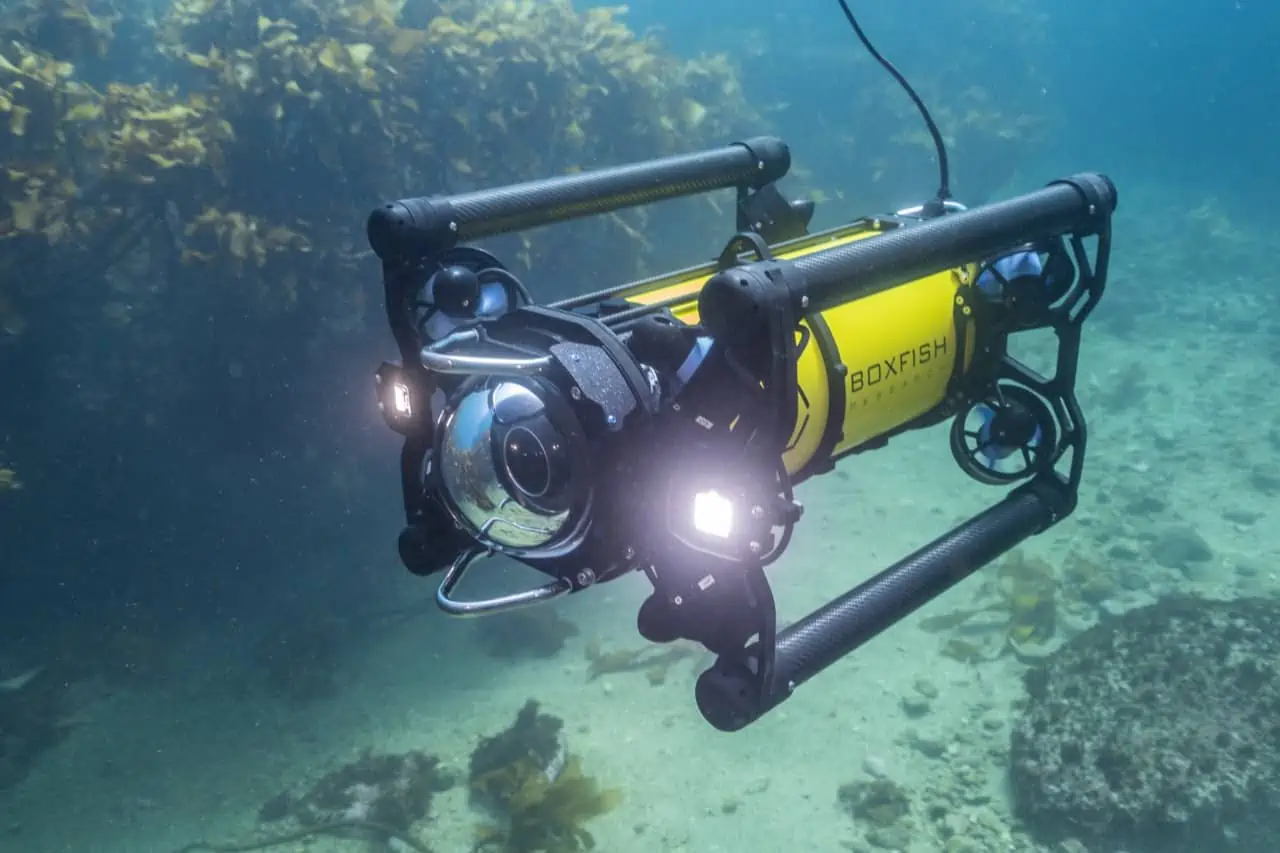
Vehículo de inspección submarina de Boxfish
ROV y UUV para inspección submarina
vLBC Hybrid ROV Tracked Crawler de Teledyne Marine
Los ROV se utilizan habitualmente para diversas tareas de inspección en alta mar y submarinas, como oleoductos y plataformas de petróleo y gas, cables, parques eólicos y buques. Los ROV se manejan mediante un cable, normalmente desde un buque de apoyo o desde la costa, y pueden equiparse con diversas herramientas y cargas útiles, como cámaras de alta definición, proyectores, sonares y brazos manipuladores. También pueden equiparse con mecanismos de oruga que les permiten desplazarse por la superficie del casco de un barco.
Para obtener mayores capacidades de inspección remota, se pueden utilizar otros UUV que no requieren cable. Debido a que las ondas de radio no se propagan bien bajo el agua, el control directo del vehículo de forma inalámbrica a grandes distancias puede resultar complicado, por lo que estos vehículos tienden a funcionar de forma autónoma.
Inspección submarina autónoma
AUV Phantom de Dynautics
Los AUV (vehículos submarinos autónomos) pueden realizar tareas de inspección submarina sin control remoto y pueden utilizar IA (inteligencia artificial) y algoritmos como SLAM (localización y mapeo simultáneos) para navegar por su entorno. Pueden permanecer sumergidos durante largos periodos de tiempo y recopilar grandes cantidades de datos que se pueden procesar una vez que el vehículo regresa a la superficie.
Las embarcaciones autónomas sin tripulación, conocidas como ASV (embarcaciones autónomas de superficie) también pueden utilizarse para llevar a cabo trabajos de inspección sin necesidad de la intervención directa de un operador.
La tecnología de los vehículos teledirigidos de Boxfish Robotics permite realizar estudios visuales no invasivos en zonas marinas protegidas, apoyando la investigación de la biodiversidad, la detección de especies raras y la gestión basada en datos de hábitats marinos profundos y mesofóticos