Showcase your capabilities
If you design, build or supply Autonomous Vessels, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Find Autonomous Vessel manufacturers and suppliers of autonomous boats and marine vehicles including ASV (AutonomousSurface Vessels) and AUV (Autonomous Underwater Vehicles).
Read the Technology Overview

Inertial Navigation & Positioning Technology for Unmanned, Autonomous Systems

Autonomous and Unmanned Marine Vehicles: USV, AUV, Marine ROV; Profiling Floats & Towed Systems

UAV Components: SAR, Radar Altimeter, Data Links, Telemetry, GNSS Products & C-UAS | Tactical USVs

Autonomous Boats & Unmanned Surface Vessels for Marine Monitoring, Hydrographic Survey & Rescue

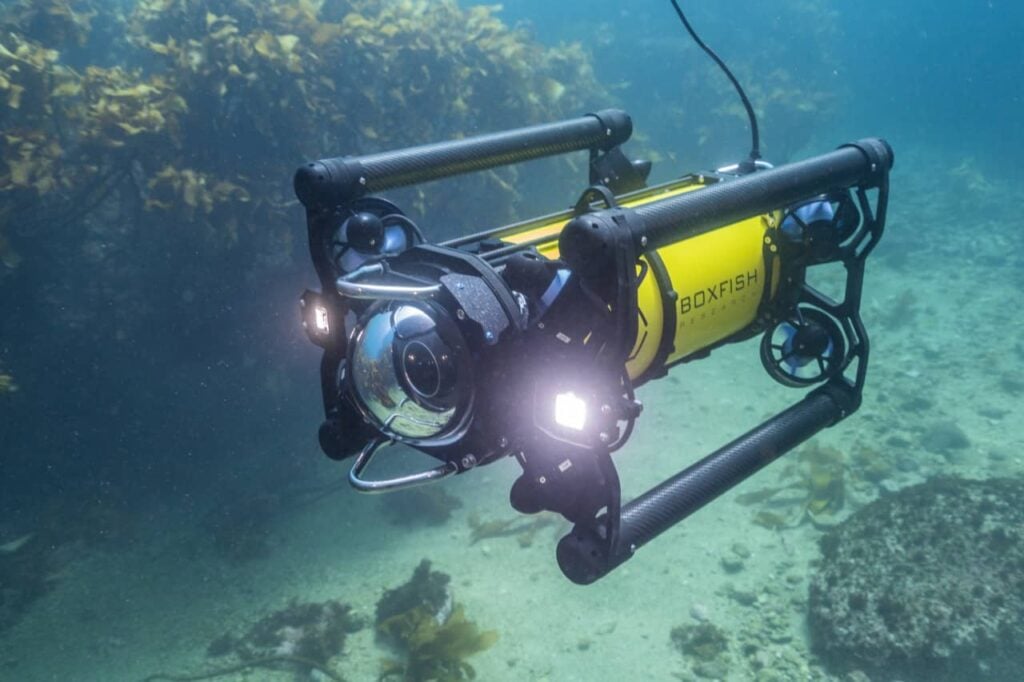
Cinematic Underwater Robotic Vehicles (ROV & AUV) for Inspections, Observation and Videography

GNSS Positioning & Navigation Systems, Mobile Mapping UAV LiDAR & Unmanned Surface Vehicles
If you design, build or supply Autonomous Vessels, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Autonomous vessels, including autonomous surface vessels (ASVs) and autonomous underwater vehicles (AUVs), are capable of operating without direct input from humans, monitoring their own statuses and making decisions based on changes in their environment.

APACHE6 Autonomous USV by CHC Navigation
Autonomous USVs, also known as ASVs (autonomous surface vessels), are being developed for a variety of applications, including cargo shipping, environmental research and border patrolling. In order to operate successfully and safely, maritime autonomous surface ships must be equipped with robust navigation and collision avoidance technologies.
Autonomous vessels are equipped with a range of sensors that allow them to gather information on their surroundings, including visible and thermal cameras, radar, and LiDAR. The data is processed by sensor fusion algorithms, and decisions are made based not only on these outputs but also on other sources of information such as weather reports and AIS (automatic identification system). Decision algorithms, which may be powered by artificial intelligence (AI), may also need to comply with maritime regulations such as COLREGS.

Gavia Modular Autonomous Underwater Vehicle by Teledyne Marine
AUVs (Autonomous Underwater Vehicles) may spend extended durations underwater, and autonomy is particularly important for these vehicles as control signals from satellites, cellular communications or RF cannot penetrate far into water.
This also means that AUVs must rely on navigation methods other than GPS/GNSS, as constantly surfacing to get a satellite fix would be highly inefficient. GNSS data is supplemented by other technologies such as marine inertial navigation systems (INS) and Doppler Velocity Logs (DVL).
AUVs are used for a wide range of civilian, commercial and military applications, These include seafloor mapping, oil and gas construction, oceanography, marine research, military ISR (intelligence, surveillance, and reconnaissance) and mine countermeasures (MCM).

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.