Find suppliers and manufacturers of Marine Inertial Navigation Systems including Maritime INS for unmanned and autonomous vessels; UUV, AUV, USV and ROV INS
If you design, build or supply Marine Inertial Navigation Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
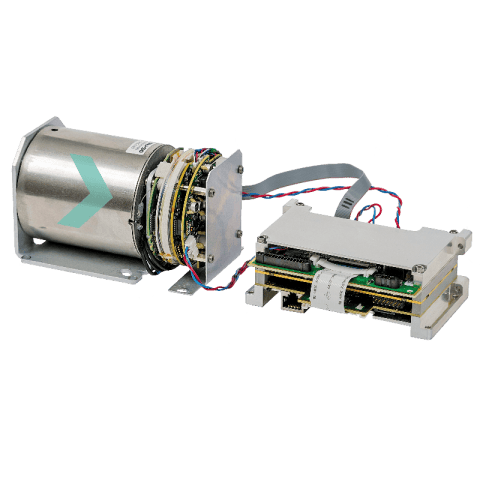
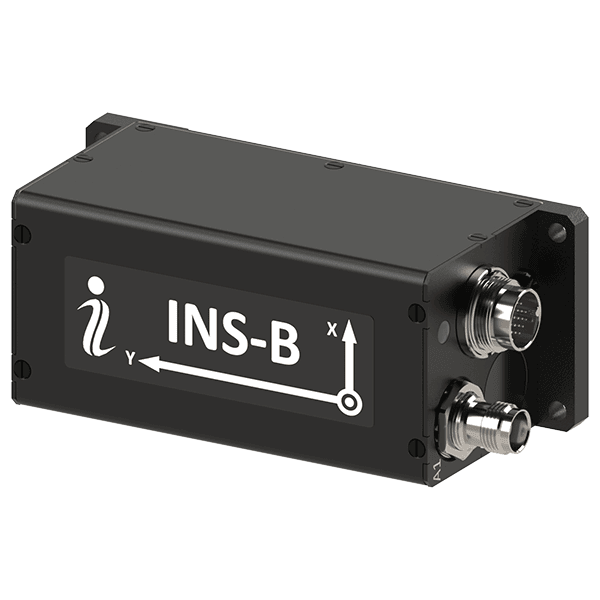
Compact FOG-based AHRS & INS with north-seeking gyrocompass
Compact FOG-based AHRS & INS with north-seeking gyrocompass
...ding Reference System (AHRS) and InertialNavigationSystem (INS) designed for precision navigation... ...nclude defense navigation, guidance, and control systems, as well as mining equipment alignment and...
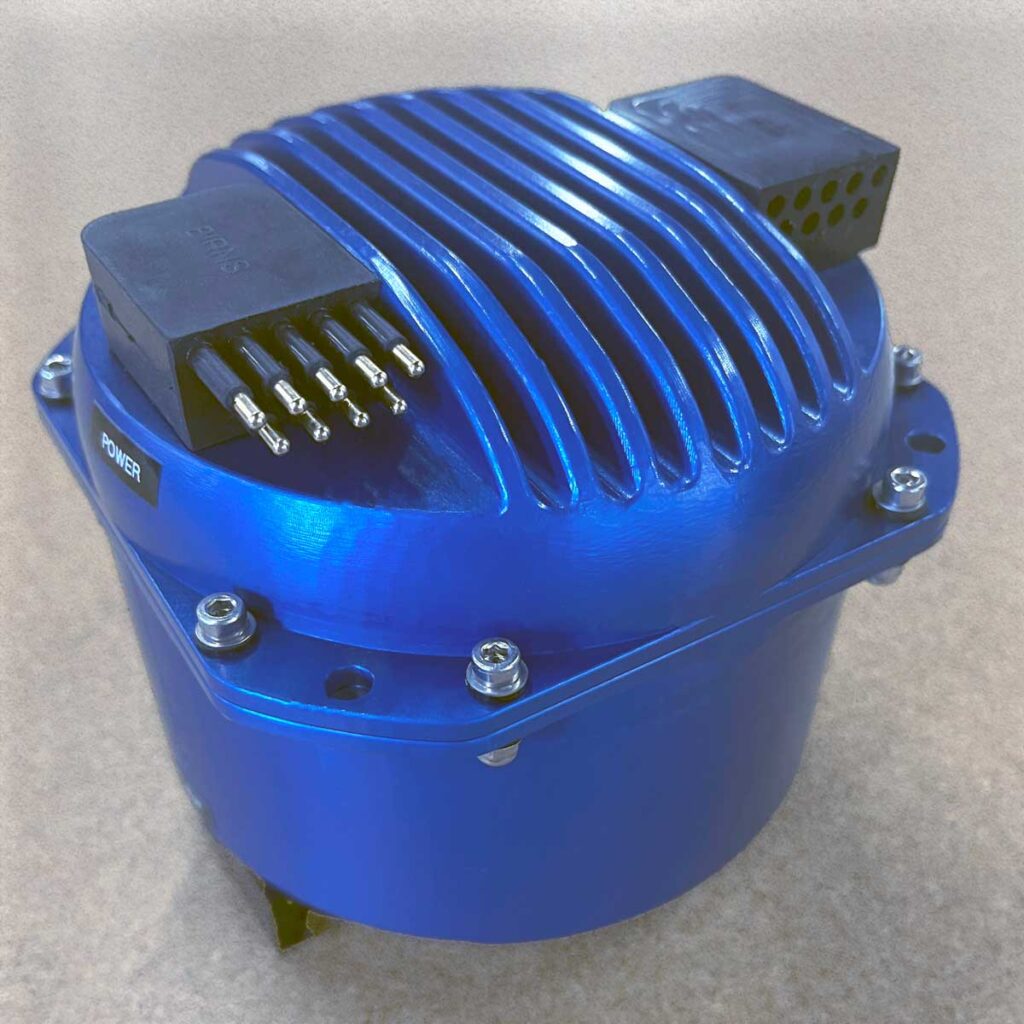
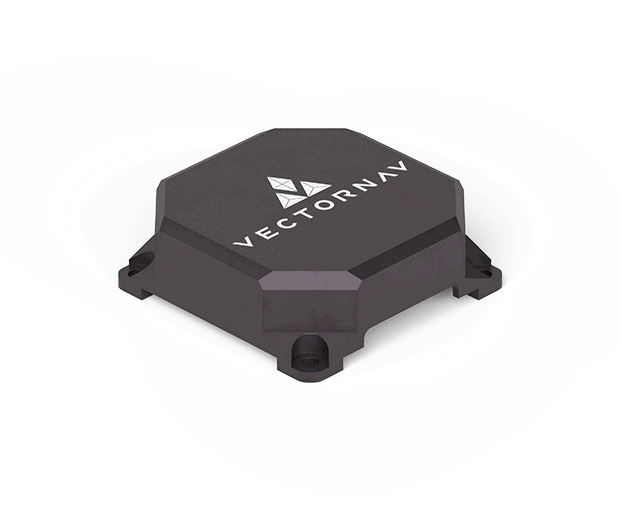
Integrated navigation & autonomy platform for small underwater vehicles
Integrated navigation & autonomy platform for small underwater vehicles
...he company’s inertialnavigationsystem (INS) product line, building directly on the proven GS4... ...... delivers precise navigation and autonomy support for next-generation unmanned underwater...
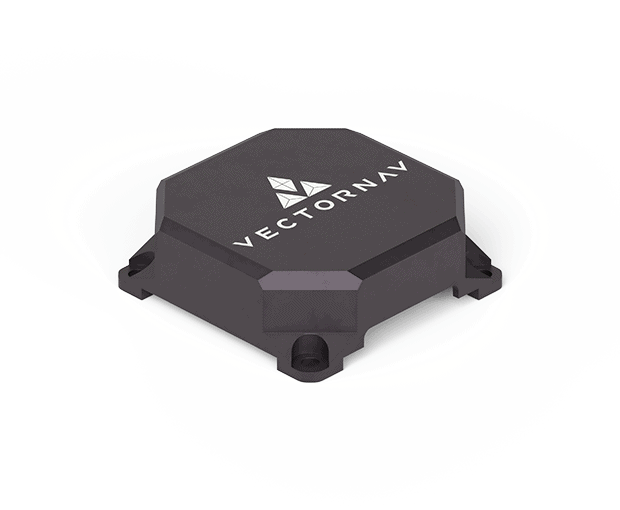
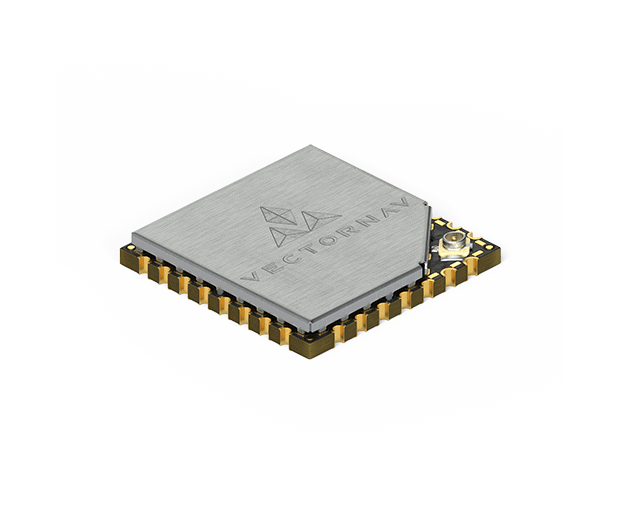
Compact GNSS-aided INS for continuous navigation capabilities
Compact GNSS-aided INS for continuous navigation capabilities
...ust continuous navigation capabilities and can be interfaced with a wide variety of external aiding... ...rial, land and marine applications. Output data includes timestamped position, velocity, angular...
...uide n500 is a navigation-grade INS designed to be coupled with external GNSS receivers to provide a... ...rial, land and marine applications. Output data includes timestamped position, velocity, angular...
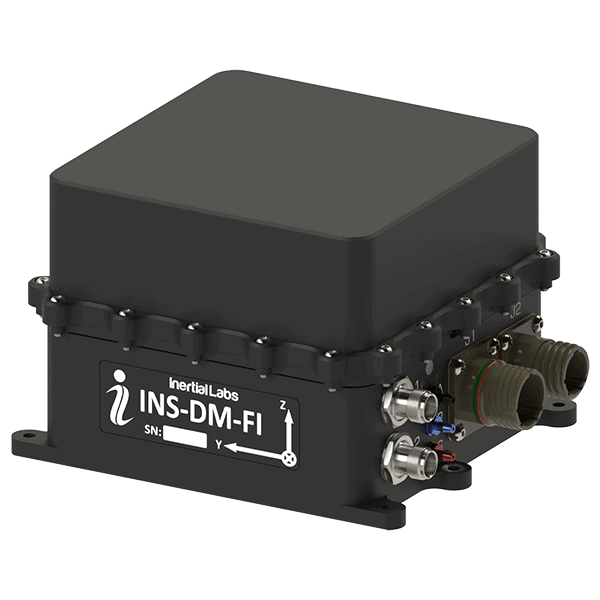
High-performance FOG INS for deepwater UUVs & AUVs
High-performance FOG INS for deepwater UUVs & AUVs
...pe (FOG)-based InertialNavigationSystem (INS) designed to provide accurate positioning and motion... ...onditions. The system supports a wide range of aiding sensors, including DVL, USBL, LBL, GNSS,...
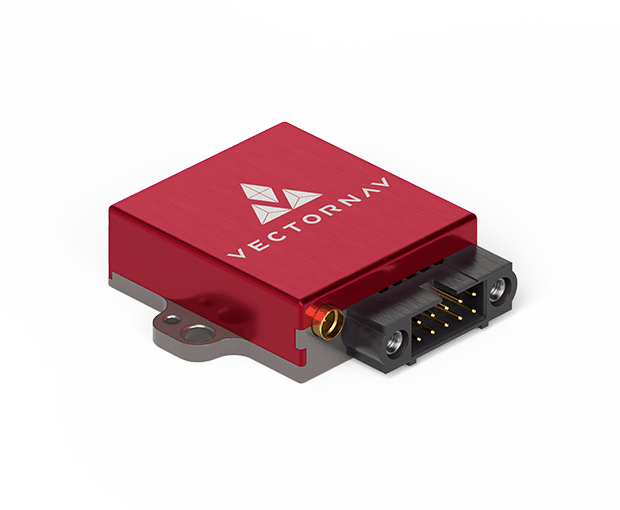
Compact inertial navigation system for ROV navigation
Compact inertial navigation system for ROV navigation
...pe (FOG)-based InertialNavigationSystem (INS) from Exail that combines a proven navigation... ...ity input. The system supports true north referencing, rotation rates, and precise roll and pitch...
Rugged, Highly Accurate FOG-based INS and AHRS with Embedded GNSS
Rugged, Highly Accurate FOG-based INS and AHRS with Embedded GNSS
... GEO-FOG 3D™ inertialnavigationsystem (INS) is a commercial off-the-shelf navigation and control... ...ture satellite navigationsystems including GPS, GLONASS, GALILEO, and BeiDou. It also offers data...
MEMS-based INS & inertial sensors for UAVs & unmanned systems
MEMS-based INS & inertial sensors for UAVs & unmanned systems
Aeron Systems, represented by UAV Propulsion Tech, produces proven MEMS-based inertial sensing... ......; MEMS accelerometer and magnetometer-based unit ideal for UAV/USV/UUV compassing and navigation...
Boreas D90 Digital FOG INS for Marine Unmanned Systems by Advanced Navigation
Marine INS (inertial navigation systems) provide essential position, orientation and velocity data for marine and maritime unmanned systems such as UUVs (unmanned underwater vehicles), AUVs (autonomous underwater vehicles), ROVs (remotely operated vehicles) and USVs (unmanned surface vessels). Once initialised, they are able to do this without requiring an external reference.
Maritime Inertial Measurement Units
The core of the marine INS is the IMU (inertial measurement unit). This is made up of MEMS accelerometers, gyroscopes, and depending on the system, magnetometers. Multiple-axis IMUs will have multiples of each sensor – a three-axis IMU will have three of each mounted orthogonally to each other. Depending on the size, cost and performance requirements, IMUs may use MEMS (micro-electromechanical system), FOG (fiber optic gyro) or RLG (ring laser gyro)-based sensors.
Rovins Subsea INS by Exail
The IMU outputs angular rate, acceleration and magnetic measurements. These need to be further processed in order to obtain position, orientation and velocity, and so an INS will combine the IMU with some kind of computing capability.
Autonomous Surface & Underwater Navigation
Autonomous surface and underwater navigation requires highly accurate heading, roll, pitch, velocity and position information, and so marine INS are crucial for such applications. They are also ideal for station-keeping and stabilization in rough waters for USVs and UUVs, and also allow ROV operators to know if their vehicle is well-positioned.
GNSS & Acoustic Data Aided INS
SPRINT-Nav Marine Navigation System by Sonardyne International
Small errors in inertial sensor measurements can compound over time to create significant drift. For systems operating on the surface of the water, INS performance can be increased by combining the data with the output from a GNSS receiver. These GNSS-aided INS use sensor fusion to combine the two sources of data and improve the position, orientation and velocity estimates.
GNSS signals cannot penetrate underwater, but AUV and ROV inertial performance can similarly be enhanced by combining the INS with a source of acoustic data such as a USBL (ultra-short baseline), LBL (long baseline) or DVL (Doppler velocity log) sensor.
Marine INS will typically be rated for immersion in water as well as resistance to salt corrosion, and systems designed for underwater use will also be pressure-rated to a particular depth.
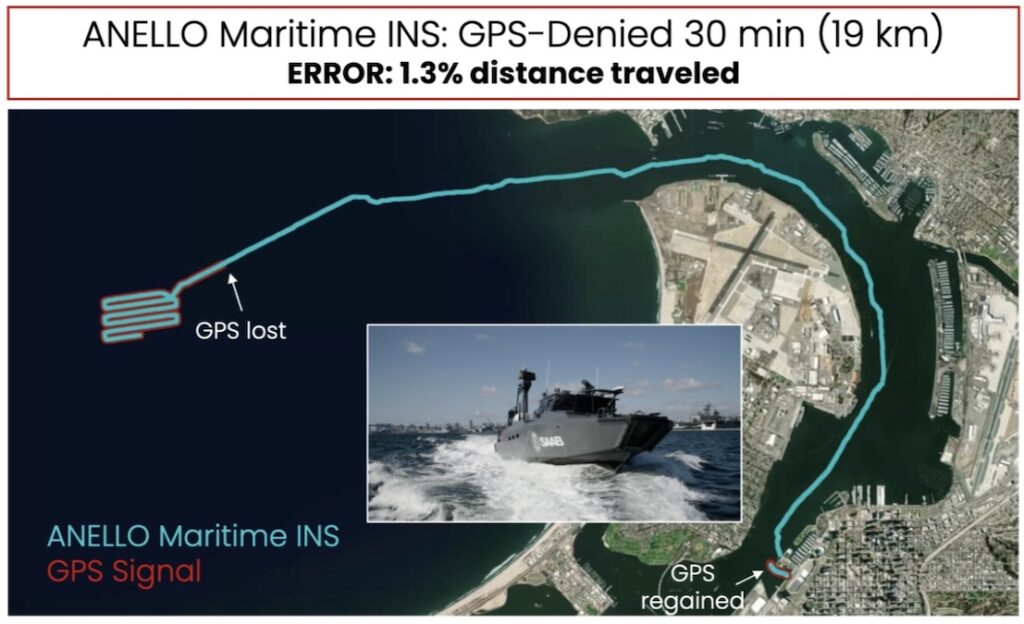
ANELLO Photonics explores how its SiPhOG™-based Maritime INS enables resilient low-drift navigation for maritime platforms operating in GPS-denied environments
Advanced Navigation has developed resilient, ITAR-free inertial navigation systems designed to maintain absolute positioning confidence for naval vessels operating within highly contested environments where GPS signals are frequently jammed or corrupted
ANELLO Photonics is integrating its optical gyroscope technology into BlackSea Technologies’ Chaser uncrewed surface vessel to provide high-precision navigation in GPS-denied environments
New strategic collaboration between ANELLO and Mythos AI integrates silicon photonics with intelligent software to ensure continuous autonomous operations in contested environments
SBG Systems received the Innovation Trophy at the MOCI Trophées Île-de-France, recognising its advanced inertial navigation technologies and global market focus
SBG Systems has established a new subsidiary in Tokyo, Japan, to strengthen its local presence, provide more personalized services, and enhance collaboration with industry leaders in inertial technology
EMCORE’s new TAC-DSP-1750 Fiber Optic Gyroscope (FOG) combines proven design with advanced PIC technology, delivering unmatched precision, compactness, and reliability for tactical and autonomous systems
Exail is delivering 100 Phins Compact inertial navigation systems (INS) to a U.S. defense company, enhancing UUV operations with precise, resilient navigation in challenging subsea environments
Aug 07, 2025
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.