

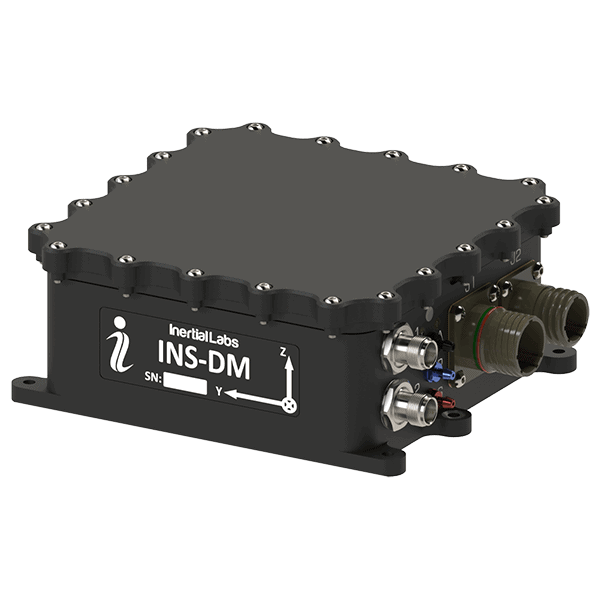
The INS-DM is an ultra-ruggedized all-in-one INS, AHRS and air data solution, featuring an IP68-rated housing with enhanced EMI shielding to MIL-STD-1275 standards. The system is available with a variety of options for IMU, GNSS receiver and magnetometer, and can also be enhanced with an optional air data computer supported by two Honeywell barometric sensors, as well as an internal fluxgate or external standalone magnetic compass.
The system incorporates cutting-edge sensor fusion and advanced navigation and guidance algorithms tailored to the specific dynamic motions of UAVs, UGVs (unmanned ground vehicles) and land vehicles, and USVs (uncrewed surface vessels). All sensing elements are fully calibrated across the entire temperature range.
| Size | 160.4 x 141.2 x 61.1 mm |
| Weight | Weight 1345 g typical (depends on configuration) |
| Horizontal Position Accuracy |
1.2 m (SP) 0.6 m (SBAS) 0.4 m (DGPS) 0.005 m (PP) 0.01 m + 1 ppm (RTK) |
| Heading Accuracy (static | dynamic) |
0.15 deg | 0.15 deg (1m baseline) 0.08 deg | 0.08 deg (2m baseline) |
| Velocity Accuracy | (depending on receiver) 0.03 m/sec or 0.05 m/sec |
| Pitch & Roll Accuracy (dynamic) | (depending on IMU) 0.01 – 0.05 deg |
| Gyroscope Bias in-run Stability | (depending on IMU) 0.25 – 2 deg/hr |
| Accelerometer Bias in-run Stability | (depending on IMU) 0.003 – 0.025 mg |





