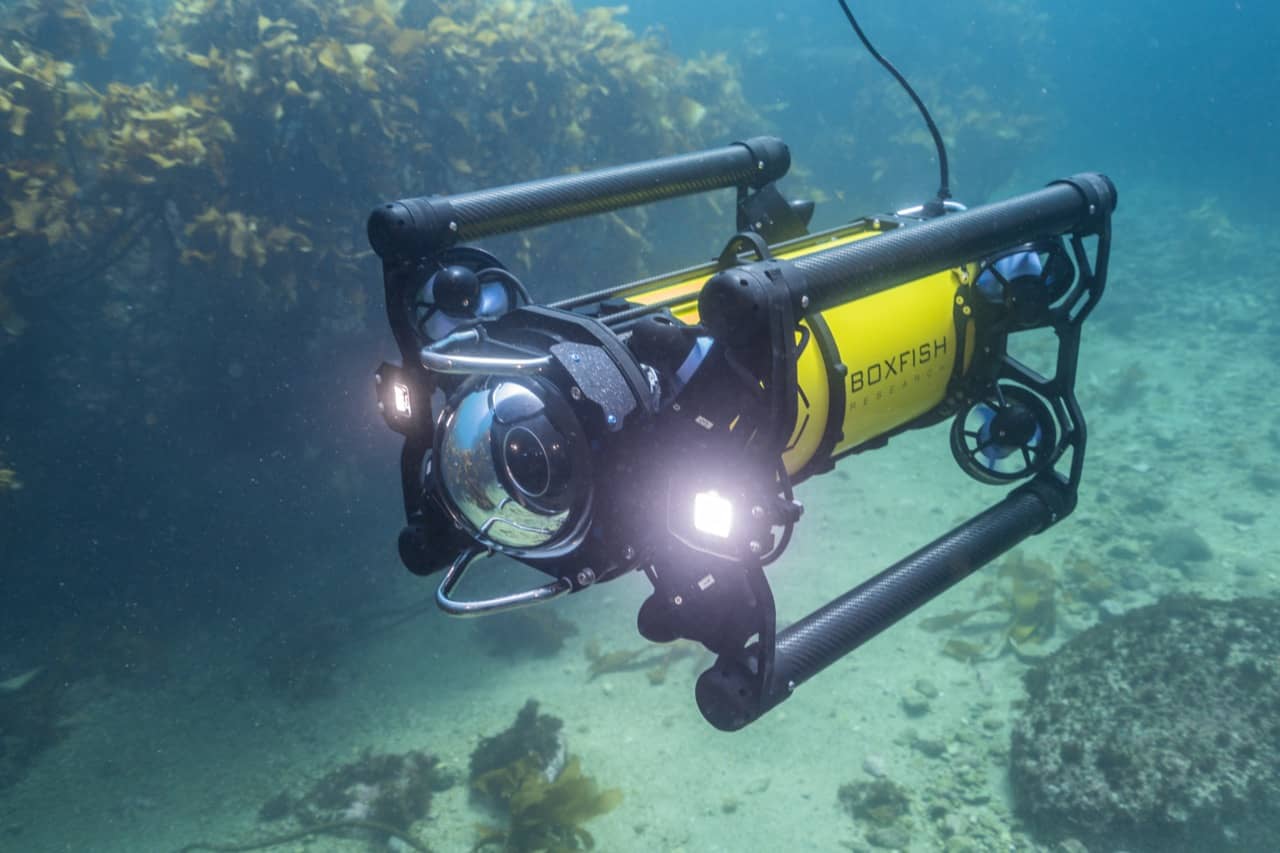
Boxfish Robotics highlights its AUV Software Suite, a unified set of applications developed to support autonomous underwater surveys conducted with the Boxfish AUV and ARV-i platforms.
Designed around a structured three-step workflow, the software separates mission planning, mission execution, and spatial visualization into dedicated applications, supporting validation and integration into scientific and professional survey workflows. Mission planning and operations do not require Internet access, making the suite suitable for remote field deployments.

Boxfish SafePath Planner
The Boxfish AUV Unified Software Suite consists of SafePath Mission Planner, Boxfish Commander, and Boxfish Live Tracker. Each application is designed to perform a specific operational role while maintaining communication across the software environment to support a seamless workflow. The interfaces are intentionally simple, avoiding unnecessary complexity and supporting deployment from small boats.
SafePath Mission Planner is used before deployment to define survey geometry and data-collection parameters through a map-based interface. Users can create waypoint routes, transects, and grid patterns while configuring operational settings including speed, altitude, and camera or environmental sensor behavior. Missions can also be saved and reused, supporting repeatable surveys and consistent long-term data collection. The software is designed for teams that do not require specialist robotics or programming expertise.

Boxfish Commander
During deployment, Boxfish Commander enables operators to initiate, supervise, and if necessary interrupt autonomous missions while monitoring live telemetry and vehicle status information.
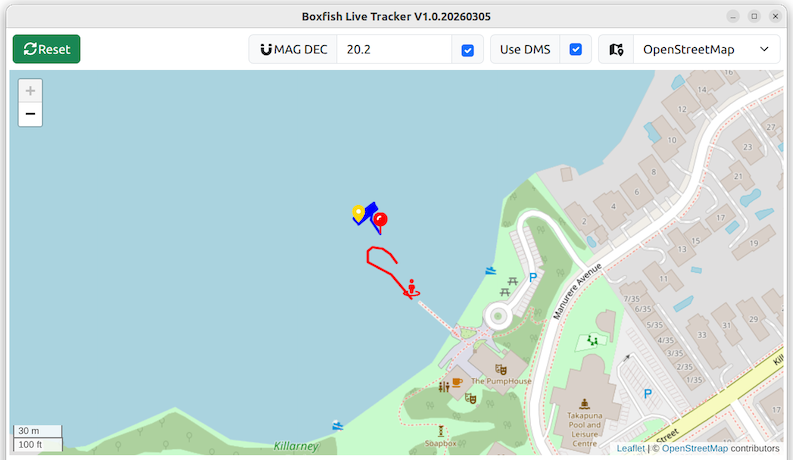
Boxfish Live Tracker provides spatial visualization of the mission by displaying vehicle position and reference points on a map, as well as playback functionality for completed missions using log files. This allows users to review survey coverage, verify vehicle paths, and associate collected data with geographic locations for reporting, analysis, and long-term monitoring studies.
To find out more information, read ‘AUV Software Suite’ here >>