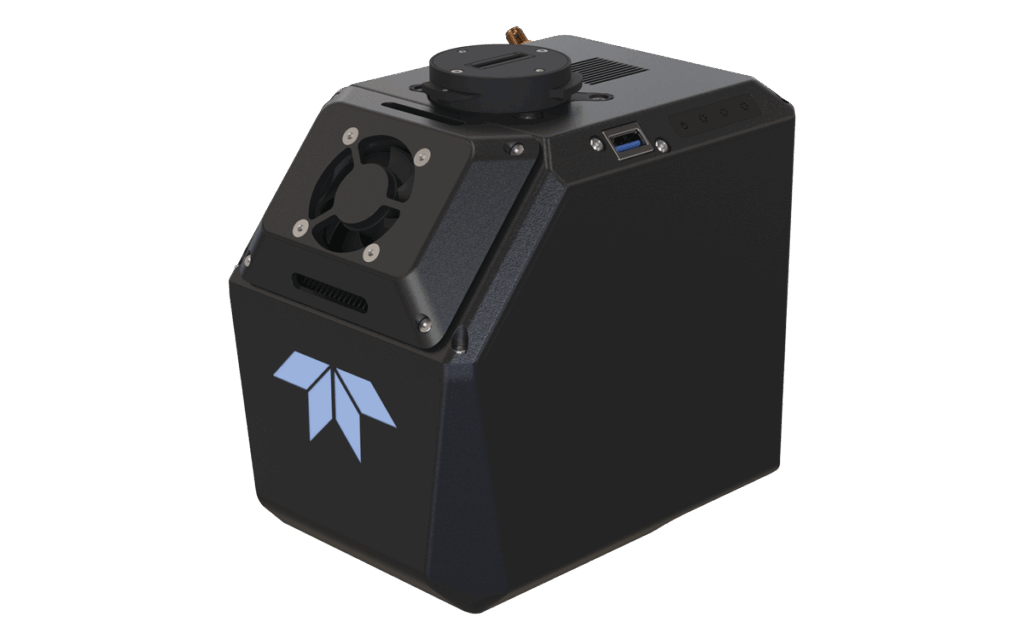
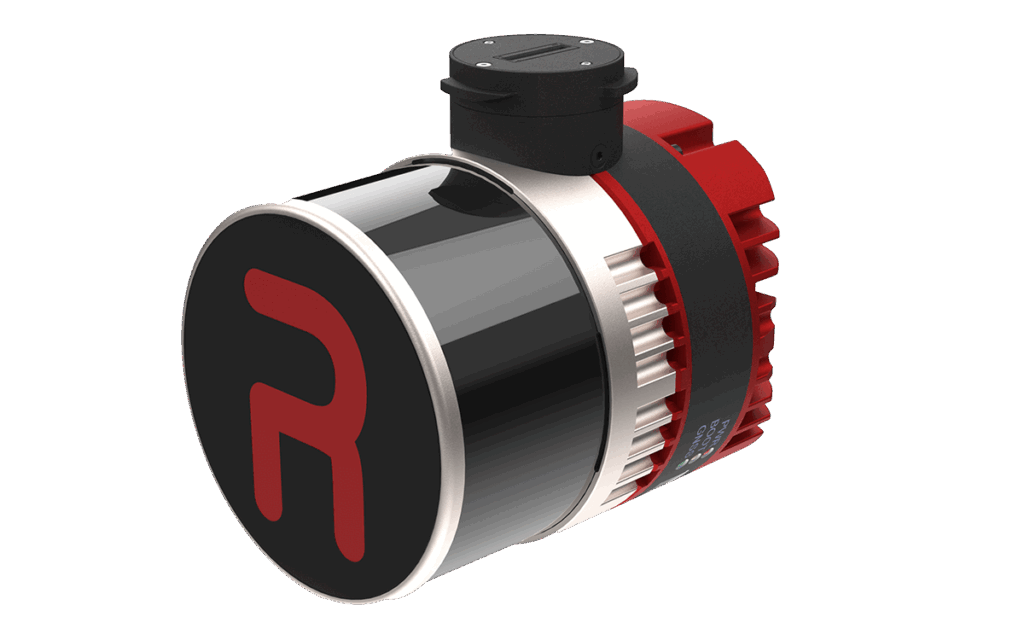
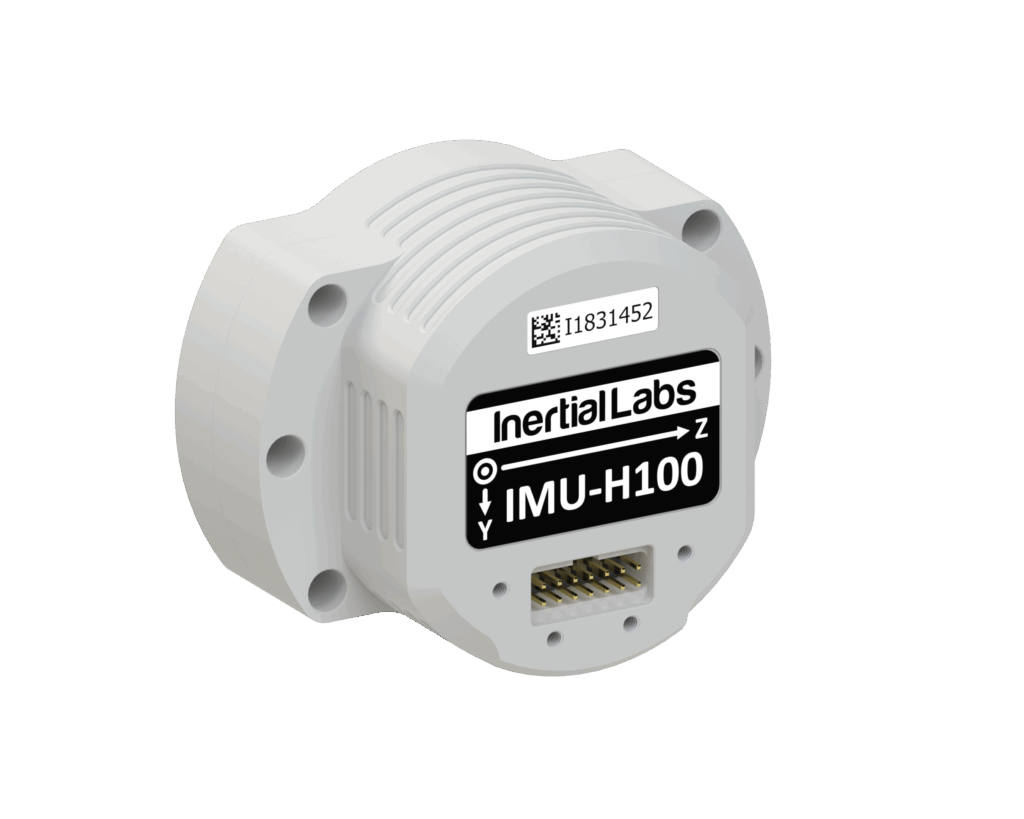
Inertial Labs is a leading designer and manufacturer of position and orientation tracking systems for unmanned vehicles. Our high accuracy solutions are based on the fusion of inertial navigation sensors with a range of other cutting-edge sensing technologies, including MEMS-IMU, accelerometers, gyroscopes and AHRS. With our engineering expertise, we create high-performance inertial sensor systems with small size and low power requirements.
Our products are ideal for a variety of unmanned systems applications, including motion tracking, weapon orientation tracking, payload stabilization, and inertial position tracking for GPS-denied environments.