GNSS Denied Navigation and Positioning for Unmanned Systems
Find suppliers, manufacturers, and developers of GNSS-denied navigation technology. GNSS-denied navigation and positioning systems enable unmanned platforms to operate reliably when satellite-based navigation signals are unavailable, degraded, or intentionally disrupted. These technologies are critical for assured positioning, navigation, and timing in contested, cluttered, and signal-denied environments across air, ground, surface, and subsea domains.
If you design, build or supply GPS/GNSS-Denied Navigation & Positioning, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
LEO-aided INS for assured PNT in contested domains
LEO-aided INS for assured PNT in contested domains
...tform achieves GNSS-denied performance of 80 m RMS position and 2 m/s velocity accuracy. Integrated... ...en traditional GNSS is unreliable or under attack. The tight coupling of inertial sensing, LEO-based...
High-accuracy inertial navigation system engineered for GNSS-denied environments
High-accuracy inertial navigation system engineered for GNSS-denied environments
... VINS Inertial NavigationSystem delivers precise positioning and orientation for unmanned platforms... ...high-precision navigation solution designed for unmanned vehicles and autonomous platforms operating...
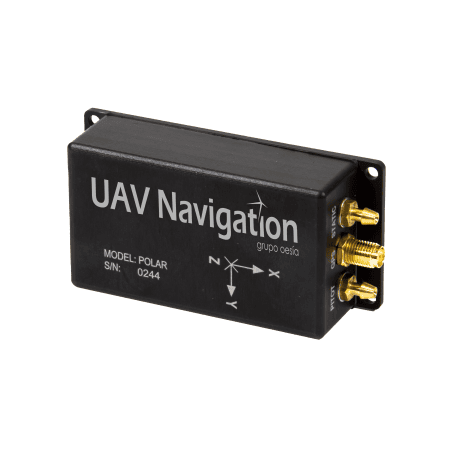
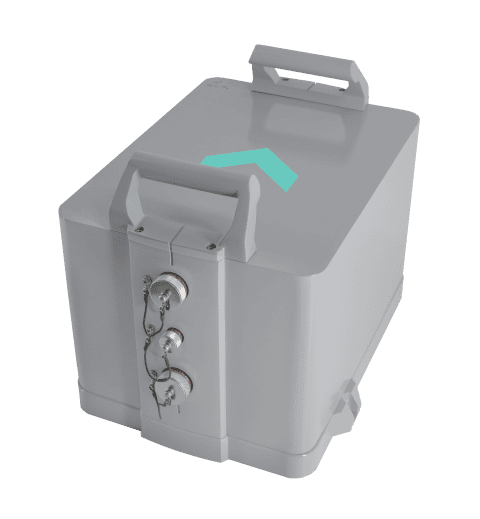
Compact FOG-based AHRS & INS with north-seeking gyrocompass
Compact FOG-based AHRS & INS with north-seeking gyrocompass
...ding Reference System (AHRS) and Inertial NavigationSystem (INS) designed for precision navigation... ... combines dual GNSS receivers for enhanced positional awareness, while the D50-MX5 adds internal...
... and low-noise navigation capability for GPS-denied environments, allowing drones and robotics to... ...... PX4 and Ardupilot, enabling precise, low-drift inertial navigation for autonomous aerial...
GPS-independent real-time drone positioning system with 200 x 200 x 100 m operational volume
GPS-independent real-time drone positioning system with 200 x 200 x 100 m operational volume
...is a real-time positioningsystem for drones and robotics that utilizes ultra-wideband (UWB) radio... ... and resilient navigation even in urban canyons, indoor locations, and maritime environments. The...
GPS-independent real-time positioning for drones & robotics
GPS-independent real-time positioning for drones & robotics
...is a real-time positioningsystem for drones and robotics that utilizes ultra-wideband (UWB) radio... ... and resilient navigation even in urban canyons, indoor locations, and maritime environments. The...
GNSS Denied Navigation and Positioning for Unmanned Systems
Overview by
Eleanor Widdows
Updated:
GNSS-denied navigation and positioning technology enables unmanned systems to determine position, velocity, and orientation without relying on GPS or other satellite navigation signals. These technologies are critical as unmanned aerial, ground, surface, and underwater platforms are increasingly required to operate in environments where GNSS is unavailable, degraded, or deliberately disrupted by jamming or spoofing.
By using onboard sensing, processing, and alternative navigation methods, GNSS-denied navigation provides resilient positioning in urban canyons, indoor and subterranean spaces, maritime environments, and contested electromagnetic conditions. This approach supports safe autonomy, mission continuity, and operational reliability when satellite-based navigation is unavailable or unreliable.
Triple-layered GPS-denied navigation suite for UAVs by Honeywell Aerospace.
Where GNSS Denied Navigation is Needed
Defense and Contested Operations
GNSS-denied navigation enables assured positioning for unmanned systems operating under GPS jamming, spoofing, and electronic attack. Military UAVs and other platforms rely on these capabilities to maintain navigation continuity in contested airspace and hostile electromagnetic environments.
Urban and Built Environment Autonomy
Autonomous vehicles operating in urban canyons face signal blockage and multipath interference from buildings. GNSS-denied navigation enables safe operation for aerial and ground platforms when continuous satellite navigation is unavailable.
Search and Rescue Operations
GNSS-denied navigation enables unmanned systems to operate in indoor, underground, or disaster-affected areas where infrastructure is damaged or unavailable. These capabilities enable effective navigation in collapsed structures, tunnels, and dense urban terrain.
Maritime and Underwater Operations
Underwater and near-shore environments inherently lack GNSS availability. Autonomous underwater vehicles and surface platforms rely on GNSS-denied navigation methods to maintain accurate positioning during long-duration missions.
Commercial and Industrial Autonomy
Industrial applications such as warehouse robotics, mining operations, offshore activities, and infrastructure inspection benefit from navigation without GNSS. These environments demand reliable positioning independent of external signals to improve safety and operational efficiency.
Types of GNSS Denied Navigation Systems
Inertial Navigation Systems
Inertial navigation systems provide self-contained positioning by calculating motion from onboard inertial sensors. These systems operate independently of external signals, making them a core capability for GNSS-denied navigation across unmanned air, ground, surface, and underwater platforms.
Inertial Measurement Units
Inertial measurement units combine accelerometers and gyroscopes to measure linear acceleration and rotational motion. IMUs are foundational components of GNSS-denied navigation, providing high-rate data for dead reckoning, attitude estimation, and motion tracking.
GNSS/INS Integrated Navigation Systems
GNSS/INS systems tightly integrate inertial navigation with satellite navigation when available, enabling seamless transitions between GNSS-aided and GNSS-denied operations. In contested or degraded environments, the inertial subsystem maintains continuous navigation while filtering and rejecting corrupted GNSS inputs, making GNSS/INS a primary architecture for resilient and assured navigation.
Marins M5 GNSS-Denied INS FOG Inertial Navigation System by Exail.
Chip Scale Atomic Clocks
Chip-scale atomic clocks provide highly stable onboard timing references that reduce inertial navigation drift during extended GNSS outages. When integrated with GNSS/INS and inertial systems, these clocks improve long-duration accuracy and timing resilience without external synchronization.
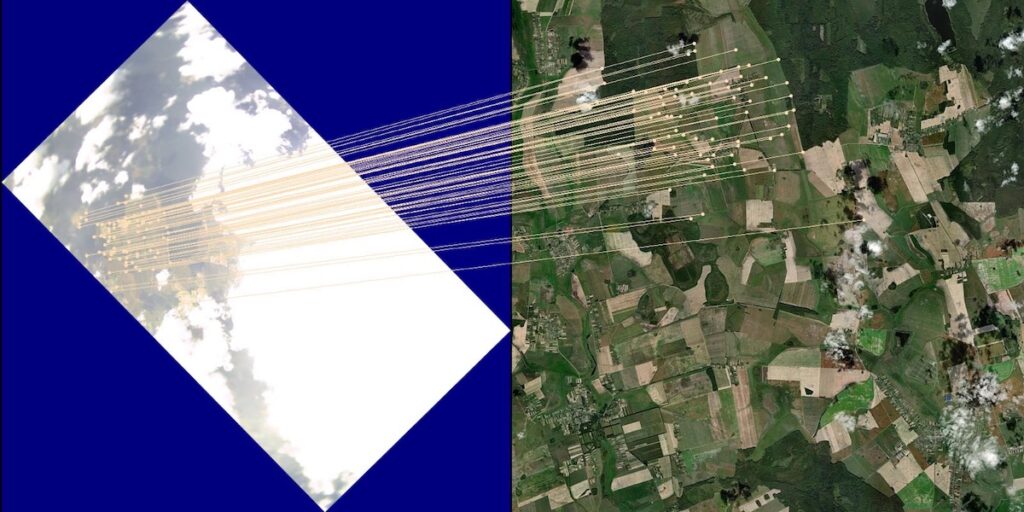
Vision-Based Navigation Systems
Vision-based navigation systems use optical cameras and onboard processing to estimate motion by tracking visual features in the environment. These systems are well-suited to GNSS-denied operations in urban, indoor, and low-altitude environments with sufficient visual structure.
Simultaneous Localization and Mapping Systems
Simultaneous localization and mapping systems enable unmanned platforms to build maps of unknown environments while estimating their position within them. SLAM systems support autonomous navigation in GNSS-denied conditions where prior maps or absolute references are unavailable.
Lidar Navigation Systems
Lidar navigation systems use active laser sensing to generate three-dimensional environmental data for localization and mapping. These systems support high-accuracy navigation in GNSS-denied environments, including low-light or visually degraded conditions.
Radar Navigation Systems
Radar navigation systems provide robust sensing and localization in environments affected by weather, dust, smoke, or poor visibility. Radar-based navigation is commonly used on maritime and aerial platforms that require long-range, all-weather, GNSS-denied capability.
Magnetic Navigation Systems
Magnetic navigation systems leverage spatial variations in Earth’s magnetic field to enable positioning without GNSS. When paired with magnetic maps, these systems offer passive navigation in environments where other sensing modalities are limited.
Terrain Referenced Navigation Systems
Terrain-referenced navigation systems estimate position by correlating onboard sensor data with stored digital terrain or elevation maps. These systems are effective for low-altitude aerial and ground platforms operating in GNSS-denied regions with well-characterized terrain.
Celestial Navigation Systems
Celestial navigation systems determine position by observing stars or other celestial references. These systems support long-duration GNSS-denied missions where terrestrial navigation cues and satellite signals are unavailable.
Multi-Sensor Navigation Systems
Multi-sensor navigation systems integrate inertial, GNSS/INS, visual, lidar, radar, magnetic, and terrain-based inputs. By combining complementary sensing modalities, these systems improve robustness and continuity across diverse GNSS-denied environments.
Sensor Fusion Software
Sensor fusion software combines data from multiple navigation sensors into a unified navigation solution. These algorithms are essential for managing uncertainty, correcting drift, and maintaining reliable positioning during GNSS outages or attacks.
Assured and Resilient Navigation Systems
Assured navigation systems are designed to operate through GNSS jamming, spoofing, and signal degradation. These systems emphasize integrity monitoring, fault detection, and resilient performance to support mission-critical unmanned operations in contested environments.
Comparisons and Tradeoffs
Selecting a GNSS-denied navigation approach involves tradeoffs between accuracy, endurance, cost, size, weight, and power. Inertial navigation systems are compact and self-contained but susceptible to cumulative error. Vision-based navigation offers high relative accuracy but depends on environmental visibility and processing resources.
GPS-Denied GNSS INS by ANELLO Photonics.
Lidar and radar sensors provide environmental independence but increase system complexity and power requirements. Magnetic navigation and terrain-referenced navigation depend on the availability and quality of environmental maps. Multi-sensor systems deliver the highest resilience but require advanced integration and navigation algorithms.
Platform type also influences system selection. UAV navigation systems prioritize lightweight sensors and fast update rates, while ground and maritime platforms can accommodate larger sensor payloads. Underwater navigation systems emphasize long-term stability and low drift in the absence of external updates.
Relevant Standards and Considerations
GNSS-denied navigation technologies for unmanned systems often align with defense and aerospace standards governing navigation performance, resilience, and safety. Relevant standards include military specifications that address assured positioning, electromagnetic compatibility, and resilience against jamming and spoofing. Interoperability and modularity are essential considerations for integration into existing unmanned system architectures.
Assured navigation solutions increasingly emphasize cybersecurity, signal integrity, and robustness against spoofing attacks. Navigation algorithms must detect anomalies, reject corrupted inputs, and maintain safe operation under degraded conditions. As autonomy levels increase, GNSS-denied navigation becomes a foundational capability supporting reliable decision-making and mission execution.
GNSS-denied navigation and positioning technologies continue to evolve as unmanned systems expand into more complex and contested environments. Advances in sensor fusion algorithms, onboard computing, and alternative navigation modalities are enabling resilient navigation without reliance on satellite signals across air, land, sea, and subsurface domains.
UAVOS has tested NAVAI, a vision-based navigation module that uses neural networks, real-time camera imagery and pre-loaded terrain maps to provide an additional positioning input for UAS operating in GNSS-degraded environments
Agilica’s beacon-based Ultra-Wideband positioning system has supported 30 successful maritime uncrewed aerial vehicle recoveries to a vessel travelling at approximately 10 knots, with no failed recoveries recorded during the trial sequence
Advanced Navigation's resilient inertial navigation solutions are designed to maintain precise drone tracking and engagement capabilities during electronic warfare conditions and total GPS denial to ensure mission success
Septentrio's comprehensive product portfolio utilizes advanced anti-jamming and anti-spoofing technology and also includes Blue UAS Framework-listed GNSS receivers
Advanced Navigation explains how counter-UAS platforms maintain reliable heading and positioning in GNSS-denied environments, using inertial solutions to support performance on commercial vehicles under jamming and spoofing conditions
Inertial Labs outlines the integration and flight-tested performance of visual-aided inertial navigation with vision-based positioning, combining inertial measurement data with visual inputs to support accurate localization in GNSS-denied conditions
VectorNav has introduced 90G and 250G accelerometers and 4000°/sec gyroscope ranges across its tactical IMU and INS platforms, supporting reliable navigation in high-G, GPS-denied environments for interceptor, hypersonic, and counter-UAS applications
Advanced Navigation has raised $110 million in Series C funding to support global expansion, scale its Positioning, Navigation, and Timing technologies, and expand its capabilities for autonomous systems operating in complex environments
Mar 20, 2026
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.