GNSS-unabhängige Navigation und Ortung für unbemannte Systeme
Finden Sie Lieferanten, Hersteller und Entwickler von GNSS-unabhängiger Navigationstechnologie. GNSS-unabhängige Navigations- und Positionierungssysteme ermöglichen den zuverlässigen Betrieb unbemannter Plattformen, wenn satellitengestützte Navigationssignale nicht verfügbar sind, beeinträchtigt oder absichtlich gestört werden. Diese Technologien sind entscheidend für eine zuverlässige Positionierung, Navigation und Zeitmessung in umkämpften, unübersichtlichen und signalunabhängigen Umgebungen in der Luft, am Boden, an der Oberfläche und unter Wasser.
Wenn Sie entwerfen, bauen oder liefern GPS/GNSS-gestützte Navigation und Ortung, Erstellen Sie ein Profil, um Ihre Kompetenzen zu präsentieren und mit Besuchern in Kontakt zu treten, die einen konkreten Bedarf an Ihren Lösungen haben.
GNSS-unabhängige Navigation und Ortung für unbemannte Systeme
Übersicht von
Eleanor Widdows
Aktualisiert:
GNSS-unabhängige Navigations- und Ortungstechnologien ermöglichen es unbemannten Systemen, Position, Geschwindigkeit und Ausrichtung zu bestimmen, ohne auf GPS oder andere Satellitennavigationssignale angewiesen zu sein. Diese Technologien sind von entscheidender Bedeutung, da unbemannte Luft-, Boden-, Oberflächen- und Unterwasserplattformen zunehmend in Umgebungen eingesetzt werden müssen, in denen GNSS nicht verfügbar ist, beeinträchtigt oder absichtlich durch Störsignale oder Spoofing gestört wird.
Durch den Einsatz von integrierten Sensoren, Verarbeitungs- und alternativen Navigationsmethoden bietet die GNSS-unabhängige Navigation eine robuste Positionsbestimmung in städtischen Schluchten, Innenräumen und unterirdischen Räumen, maritimen Umgebungen und schwierigen elektromagnetischen Bedingungen. Dieser Ansatz unterstützt sichere Autonomie, Missionskontinuität und Betriebssicherheit, wenn satellitengestützte Navigation nicht verfügbar oder unzuverlässig ist.
Dreischichtige GPS-Denied Navigation Suite für UAVs von Honeywell Aerospace.
Wo eine GNSS-unabhängige Navigation erforderlich ist
Verteidigung und umkämpfte Operationen
Eine GNSS-unabhängige Navigation ermöglicht eine zuverlässige Positionsbestimmung für unbemannte Systeme, die unter GPS-Störsignalen, Spoofing und elektronischen Angriffen operieren. Militärische UAVs und andere Plattformen sind auf diese Fähigkeiten angewiesen, um die Kontinuität der Navigation in umkämpften Lufträumen und feindlichen elektromagnetischen Umgebungen aufrechtzuerhalten.
Autonomie in städtischen und bebauten Umgebungen
Autonome Fahrzeuge, die in städtischen Schluchten eingesetzt werden, sind mit Signalblockaden und Mehrwegeeffekten durch Gebäude konfrontiert. Die GNSS-unabhängige Navigation ermöglicht den sicheren Betrieb von Luft- und Bodenplattformen, wenn eine kontinuierliche Satellitennavigation nicht verfügbar ist.
Such- und Rettungsaktionen
Die GNSS-unabhängige Navigation ermöglicht den Einsatz unbemannter Systeme in Innenräumen, unterirdischen oder von Katastrophen betroffenen Gebieten, in denen die Infrastruktur beschädigt oder nicht verfügbar ist. Diese Fähigkeiten ermöglichen eine effektive Navigation in eingestürzten Gebäuden, Tunneln und dicht bebauten städtischen Gebieten.
Maritime und Unterwasseroperationen
Unterwasser- und küstennahe Umgebungen sind naturgemäß nicht mit GNSS abgedeckt. Autonome Unterwasserfahrzeuge und Oberflächenplattformen sind auf Navigationsmethoden ohne GNSS angewiesen, um während lang andauernder Missionen eine genaue Positionierung aufrechtzuerhalten.
Autonomie in Wirtschaft und Industrie
Industrielle Anwendungen wie Lagerrobotik, Bergbau, Offshore-Aktivitäten und Infrastrukturinspektionen profitieren von der Navigation ohne GNSS. Diese Umgebungen erfordern eine zuverlässige Positionierung unabhängig von externen Signalen, um die Sicherheit und Betriebseffizienz zu verbessern.
Arten von GNSS-unabhängigen Navigationssystemen
Trägheitsnavigationssysteme
Trägheitsnavigationssysteme bieten eine eigenständige Positionsbestimmung, indem sie die Bewegung anhand von integrierten Trägheitssensoren berechnen. Diese Systeme arbeiten unabhängig von externen Signalen und sind damit eine Kernkompetenz für die Navigation ohne GNSS auf unbemannten Luft-, Boden-, Oberflächen- und Unterwasserplattformen.
Trägheitsmesseinheiten
Trägheitsmesseinheiten kombinieren Beschleunigungsmesser und Gyroskope, um lineare Beschleunigung und Drehbewegung zu messen. IMUs sind grundlegende Komponenten der Navigation ohne GNSS und liefern Daten mit hoher Rate für die Koppelnavigation, die Lagebestimmung und die Bewegungsverfolgung.
Integrierte GNSS/INS-Navigationssysteme
GNSS/INS-Systeme integrieren Trägheitsnavigation und Satellitennavigation, sofern verfügbar, eng miteinander und ermöglichen so einen nahtlosen Übergang zwischen GNSS-gestützten und GNSS-gestützten Operationen. In umkämpften oder beeinträchtigten Umgebungen sorgt das Trägheitsnavigationssystem für eine kontinuierliche Navigation, während es fehlerhafte GNSS-Eingaben filtert und zurückweist, wodurch GNSS/INS zu einer primären Architektur für eine widerstandsfähige und zuverlässige Navigation wird.
Marins M5 GNSS-unabhängiges INS FOG-Trägheitsnavigationssystem von Exail.
Chip-Atomuhren
Chip-Atomuhren bieten hochstabile Timing-Referenzen an Bord, die die Drift der Trägheitsnavigation bei längeren GNSS-Ausfällen reduzieren. In Verbindung mit GNSS/INS- und Trägheitssystemen verbessern diese Uhren die Langzeitgenauigkeit und Timing-Resilienz ohne externe Synchronisation.
Bildbasierte Navigationssysteme
Bildbasierte Navigationssysteme verwenden optische Kameras und Onboard-Verarbeitung, um Bewegungen durch Verfolgung visueller Merkmale in der Umgebung zu schätzen. Diese Systeme eignen sich gut für den Betrieb ohne GNSS in städtischen, Innen- und Niedrigflughöhenumgebungen mit ausreichender visueller Struktur.
Simultane Lokalisierungs- und Kartierungssysteme
Simultane Lokalisierungs- und Kartierungssysteme ermöglichen es unbemannten Plattformen, Karten unbekannter Umgebungen zu erstellen und gleichzeitig ihre Position darin zu schätzen. SLAM-Systeme unterstützen die autonome Navigation unter Bedingungen ohne GNSS-Empfang, bei denen keine vorherigen Karten oder absoluten Referenzen verfügbar sind.
Lidar-Navigationssysteme
Lidar-Navigationssysteme verwenden aktive Lasersensorik, um dreidimensionale Umgebungsdaten für die Lokalisierung und Kartierung zu generieren. Diese Systeme unterstützen eine hochgenaue Navigation in Umgebungen ohne GNSS-Empfang, einschließlich schlechter Lichtverhältnisse oder visuell beeinträchtigter Bedingungen.
Radar-Navigationssysteme
Radar-Navigationssysteme bieten robuste Sensorik und Lokalisierung in Umgebungen, die durch Wetter, Staub, Rauch oder schlechte Sicht beeinträchtigt sind. Radarbasierte Navigation wird häufig auf See- und Luftplattformen eingesetzt, die eine weitreichende, allwettertaugliche und GNSS-unabhängige Funktion erfordern.
Magnetische Navigationssysteme
Magnetische Navigationssysteme nutzen räumliche Schwankungen im Erdmagnetfeld, um eine Positionierung ohne GNSS zu ermöglichen. In Verbindung mit magnetischen Karten bieten diese Systeme eine passive Navigation in Umgebungen, in denen andere Erfassungsmodalitäten nur begrenzt verfügbar sind.
Geländereferenzierte Navigationssysteme
Geländereferenzierte Navigationssysteme schätzen die Position, indem sie die Daten der Bordsensoren mit gespeicherten digitalen Gelände- oder Höhenkarten korrelieren. Diese Systeme sind effektiv für Luft- und Bodenplattformen in geringer Höhe, die in Regionen ohne GNSS-Empfang mit gut charakterisiertem Gelände operieren.
Himmelsnavigationssysteme
Himmelsnavigationssysteme bestimmen die Position durch Beobachtung von Sternen oder anderen himmlischen Referenzpunkten. Diese Systeme unterstützen lang andauernde Missionen ohne GNSS-Empfang, bei denen terrestrische Navigationshilfen und Satellitensignale nicht verfügbar sind.
Multisensor-Navigationssysteme
Multisensor-Navigationssysteme integrieren Trägheits-, GNSS/INS-, visuelle, Lidar-, Radar-, magnetische und geländebasierte Eingaben. Durch die Kombination komplementärer Sensormodalitäten verbessern diese Systeme die Robustheit und Kontinuität in verschiedenen Umgebungen ohne GNSS-Empfang.
Sensorfusionssoftware
Sensorfusionssoftware kombiniert Daten von mehreren Navigationssensoren zu einer einheitlichen Navigationslösung. Diese Algorithmen sind unerlässlich, um Unsicherheiten zu bewältigen, Abweichungen zu korrigieren und eine zuverlässige Positionierung während GNSS-Ausfällen oder -Angriffen aufrechtzuerhalten.
Sichere und widerstandsfähige Navigationssysteme
Sichere Navigationssysteme sind so konzipiert, dass sie auch bei GNSS-Störungen, Spoofing und Signalverschlechterungen funktionieren. Diese Systeme legen den Schwerpunkt auf Integritätsüberwachung, Fehlererkennung und widerstandsfähige Leistung, um missionskritische unbemannte Operationen in umkämpften Umgebungen zu unterstützen.
Vergleiche und Kompromisse
Die Wahl eines GNSS-unabhängigen Navigationsansatzes erfordert Kompromisse zwischen Genauigkeit, Ausdauer, Kosten, Größe, Gewicht und Leistung. Trägheitsnavigationssysteme sind kompakt und in sich geschlossen, aber anfällig für kumulative Fehler. Die bildbasierte Navigation bietet eine hohe relative Genauigkeit, ist jedoch von der Sichtbarkeit der Umgebung und den Verarbeitungsressourcen abhängig.
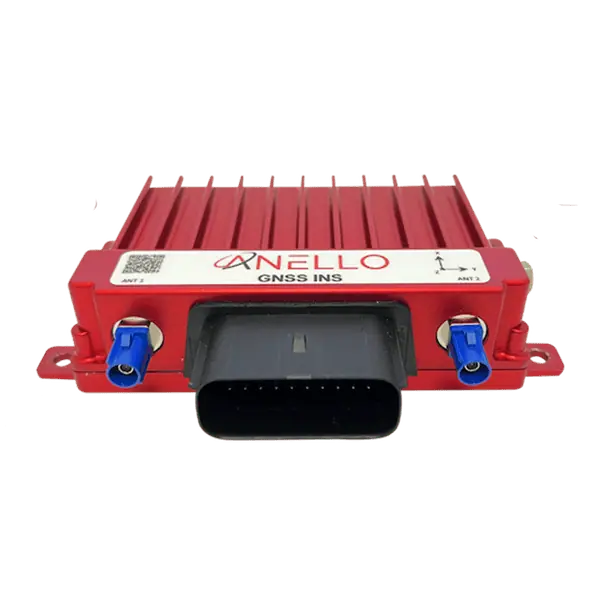
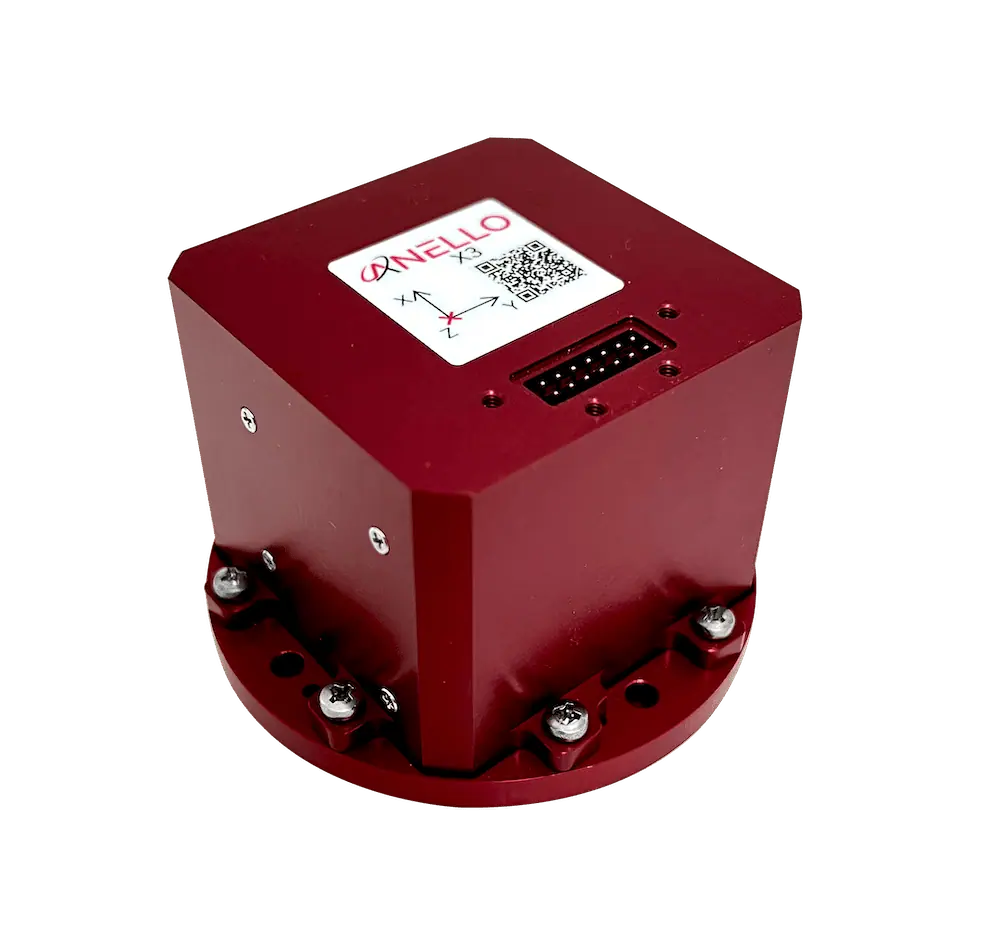
GPS-Denied GNSS INS von ANELLO Photonics.
Lidar- und Radarsensoren bieten Unabhängigkeit von den Umgebungsbedingungen, erhöhen jedoch die Komplexität des Systems und den Strombedarf. Magnetische Navigation und geländereferenzierte Navigation hängen von der Verfügbarkeit und Qualität von Umgebungskarten ab. Multisensorsysteme bieten die höchste Ausfallsicherheit, erfordern jedoch fortschrittliche Integrations- und Navigationsalgorithmen.
Auch der Plattformtyp beeinflusst die Systemauswahl. UAV-Navigationssysteme legen Wert auf leichte Sensoren und schnelle Aktualisierungsraten, während Boden- und Seeplattformen größere Sensor-Nutzlasten aufnehmen können. Unterwasser-Navigationssysteme legen Wert auf langfristige Stabilität und geringe Drift ohne externe Aktualisierungen.
Relevante Normen und Überlegungen
GNSS-unabhängige Navigationstechnologien für unbemannte Systeme entsprechen häufig den Verteidigungs- und Luftfahrtnormen, die die Navigationsleistung, Ausfallsicherheit und Sicherheit regeln. Zu den relevanten Standards gehören militärische Spezifikationen, die sich mit sicherer Positionierung, elektromagnetischer Verträglichkeit und Widerstandsfähigkeit gegen Stör- und Spoofing-Angriffe befassen. Interoperabilität und Modularität sind wesentliche Überlegungen für die Integration in bestehende Architekturen unbemannter Systeme.
Sichere Navigationslösungen legen zunehmend Wert auf Cybersicherheit, Signalintegrität und Robustheit gegen Spoofing-Angriffe. Navigationsalgorithmen müssen Anomalien erkennen, fehlerhafte Eingaben zurückweisen und einen sicheren Betrieb unter verschlechterten Bedingungen aufrechterhalten. Mit zunehmender Autonomie wird die GNSS-unabhängige Navigation zu einer grundlegenden Fähigkeit, die eine zuverlässige Entscheidungsfindung und Missionsausführung unterstützt.
GNSS-unabhängige Navigations- und Positionierungstechnologien entwickeln sich weiter, da unbemannte Systeme in komplexere und umkämpfte Umgebungen vordringen. Fortschritte bei Sensorfusionsalgorithmen, Bordcomputern und alternativen Navigationsmodalitäten ermöglichen eine robuste Navigation ohne Abhängigkeit von Satellitensignalen in der Luft, zu Lande, zu Wasser und unter der Oberfläche.