Navegação e posicionamento sem GNSS para sistemas não tripulados
Encontre fornecedores, fabricantes e desenvolvedores de tecnologia de navegação sem GNSS. Os sistemas de navegação e posicionamento sem GNSS permitem que plataformas não tripuladas operem de forma confiável quando os sinais de navegação por satélite estão indisponíveis, degradados ou intencionalmente interrompidos. Essas tecnologias são essenciais para garantir o posicionamento, a navegação e a sincronização em ambientes disputados, confusos e sem sinal nos domínios aéreo, terrestre, marítimo e submarino.
Se você projeta, constrói ou fornece Navegação e posicionamento sem GPS/GNSS, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Navegação e posicionamento sem GNSS para sistemas não tripulados
Visão geral por
Eleanor Widdows
Atualizado:
A tecnologia de navegação e posicionamento sem GNSS permite que sistemas não tripulados determinem a posição, velocidade e orientação sem depender do GPS ou outros sinais de navegação por satélite. Estas tecnologias são fundamentais, uma vez que as plataformas aéreas, terrestres, de superfície e subaquáticas não tripuladas são cada vez mais necessárias para operar em ambientes onde o GNSS não está disponível, está degradado ou é deliberadamente interrompido por interferências ou spoofing.
Ao utilizar sensores integrados, processamento e métodos de navegação alternativos, a navegação sem GNSS proporciona um posicionamento resiliente em canyons urbanos, espaços interiores e subterrâneos, ambientes marítimos e condições eletromagnéticas adversas. Esta abordagem apoia a autonomia segura, a continuidade da missão e a fiabilidade operacional quando a navegação por satélite não está disponível ou não é fiável.
Conjunto de navegação sem GPS de três camadas para UAVs da Honeywell Aerospace.
Onde a navegação sem GNSS é necessária
Defesa e operações contestadas
A navegação sem GNSS permite o posicionamento garantido para sistemas não tripulados que operam sob interferência, falsificação e ataque eletrónico do GPS. UAVs militares e outras plataformas dependem dessas capacidades para manter a continuidade da navegação em espaços aéreos contestados e ambientes eletromagnéticos hostis.
Autonomia em ambientes urbanos e construídos
Veículos autónomos que operam em canyons urbanos enfrentam bloqueio de sinal e interferência multipath proveniente de edifícios. A navegação sem GNSS permite a operação segura de plataformas aéreas e terrestres quando a navegação por satélite contínua não está disponível.
Operações de busca e salvamento
A navegação sem GNSS permite que sistemas não tripulados operem em áreas internas, subterrâneas ou afetadas por desastres, onde a infraestrutura está danificada ou indisponível. Essas capacidades permitem uma navegação eficaz em estruturas desmoronadas, túneis e terrenos urbanos densos.
Operações marítimas e subaquáticas
Os ambientes subaquáticos e próximos à costa carecem inerentemente de disponibilidade de GNSS. Veículos subaquáticos autónomos e plataformas de superfície dependem de métodos de navegação sem GNSS para manter o posicionamento preciso durante missões de longa duração.
Autonomia comercial e industrial
Aplicações industriais, como robótica de armazéns, operações de mineração, atividades offshore e inspeção de infraestruturas, beneficiam da navegação sem GNSS. Estes ambientes exigem um posicionamento fiável, independente de sinais externos, para melhorar a segurança e a eficiência operacional.
Tipos de sistemas de navegação sem GNSS
Sistemas de navegação inercial
Os sistemas de navegação inercial fornecem posicionamento autónomo, calculando o movimento a partir de sensores inerciais integrados. Estes sistemas operam independentemente de sinais externos, tornando-os uma capacidade essencial para a navegação sem GNSS em plataformas não tripuladas aéreas, terrestres, de superfície e subaquáticas.
Unidades de medição inercial
As unidades de medição inercial combinam acelerómetros e giroscópios para medir a aceleração linear e o movimento rotacional. As IMUs são componentes fundamentais da navegação sem GNSS, fornecendo dados de alta velocidade para navegação estimada, estimativa de atitude e rastreamento de movimento.
Sistemas de navegação integrados GNSS/INS
Os sistemas GNSS/INS integram estreitamente a navegação inercial com a navegação por satélite, quando disponível, permitindo transições contínuas entre operações auxiliadas por GNSS e sem GNSS. Em ambientes contestados ou degradados, o subsistema inercial mantém a navegação contínua enquanto filtra e rejeita entradas GNSS corrompidas, tornando o GNSS/INS uma arquitetura primária para navegação resiliente e segura.
Sistema de navegação inercial Marins M5 GNSS-Denied INS FOG da Exail.
Relógios atómicos em escala de chip
Os relógios atómicos em escala de chip fornecem referências de tempo a bordo altamente estáveis que reduzem o desvio da navegação inercial durante interrupções prolongadas do GNSS. Quando integrados com GNSS/INS e sistemas inerciais, esses relógios melhoram a precisão de longa duração e a resiliência do tempo sem sincronização externa.
Sistemas de navegação baseados em visão
Os sistemas de navegação baseados em visão utilizam câmaras óticas e processamento a bordo para estimar o movimento através do rastreamento de características visuais no ambiente. Estes sistemas são adequados para operações sem GNSS em ambientes urbanos, interiores e de baixa altitude com estrutura visual suficiente.
Sistemas de localização e mapeamento simultâneos
Os sistemas de localização e mapeamento simultâneos permitem que plataformas não tripuladas criem mapas de ambientes desconhecidos enquanto estimam a sua posição dentro deles. Os sistemas SLAM suportam a navegação autónoma em condições sem GNSS, onde mapas prévios ou referências absolutas não estão disponíveis.
Sistemas de navegação Lidar
Os sistemas de navegação Lidar utilizam sensores laser ativos para gerar dados ambientais tridimensionais para localização e mapeamento. Estes sistemas suportam a navegação de alta precisão em ambientes sem GNSS, incluindo condições de pouca luz ou visibilidade reduzida.
Sistemas de navegação por radar
Os sistemas de navegação por radar fornecem deteção e localização robustas em ambientes afetados pelo clima, poeira, fumo ou visibilidade reduzida. A navegação baseada em radar é comumente usada em plataformas marítimas e aéreas que exigem capacidade de longo alcance, para todas as condições meteorológicas e sem GNSS.
Sistemas de navegação magnética
Os sistemas de navegação magnética aproveitam as variações espaciais no campo magnético da Terra para permitir o posicionamento sem GNSS. Quando combinados com mapas magnéticos, esses sistemas oferecem navegação passiva em ambientes onde outras modalidades de detecção são limitadas.
Sistemas de navegação com referência ao terreno
Os sistemas de navegação com referência ao terreno estimam a posição correlacionando os dados dos sensores a bordo com mapas digitais de terreno ou elevação armazenados. Esses sistemas são eficazes para plataformas aéreas e terrestres de baixa altitude que operam em regiões sem GNSS com terreno bem caracterizado.
Sistemas de navegação celestial
Os sistemas de navegação celestial determinam a posição observando estrelas ou outras referências celestes. Estes sistemas suportam missões de longa duração sem GNSS, onde não estão disponíveis referências de navegação terrestre e sinais de satélite.
Sistemas de navegação multissensor
Os sistemas de navegação multissensor integram entradas inerciais, GNSS/INS, visuais, lidar, radar, magnéticas e baseadas no terreno. Ao combinar modalidades de deteção complementares, estes sistemas melhoram a robustez e a continuidade em diversos ambientes sem GNSS.
Software de fusão de sensores
O software de fusão de sensores combina dados de vários sensores de navegação numa solução de navegação unificada. Esses algoritmos são essenciais para gerenciar incertezas, corrigir desvios e manter um posicionamento confiável durante interrupções ou ataques ao GNSS.
Sistemas de navegação garantidos e resilientes
Os sistemas de navegação garantidos são projetados para operar mesmo com interferência, falsificação e degradação do sinal do GNSS. Esses sistemas enfatizam o monitoramento da integridade, a detecção de falhas e o desempenho resiliente para dar suporte a operações não tripuladas de missão crítica em ambientes contestados.
Comparações e compromissos
A seleção de uma abordagem de navegação sem GNSS envolve compromissos entre precisão, resistência, custo, tamanho, peso e potência. Os sistemas de navegação inercial são compactos e autónomos, mas suscetíveis a erros cumulativos. A navegação baseada na visão oferece alta precisão relativa, mas depende da visibilidade ambiental e dos recursos de processamento.
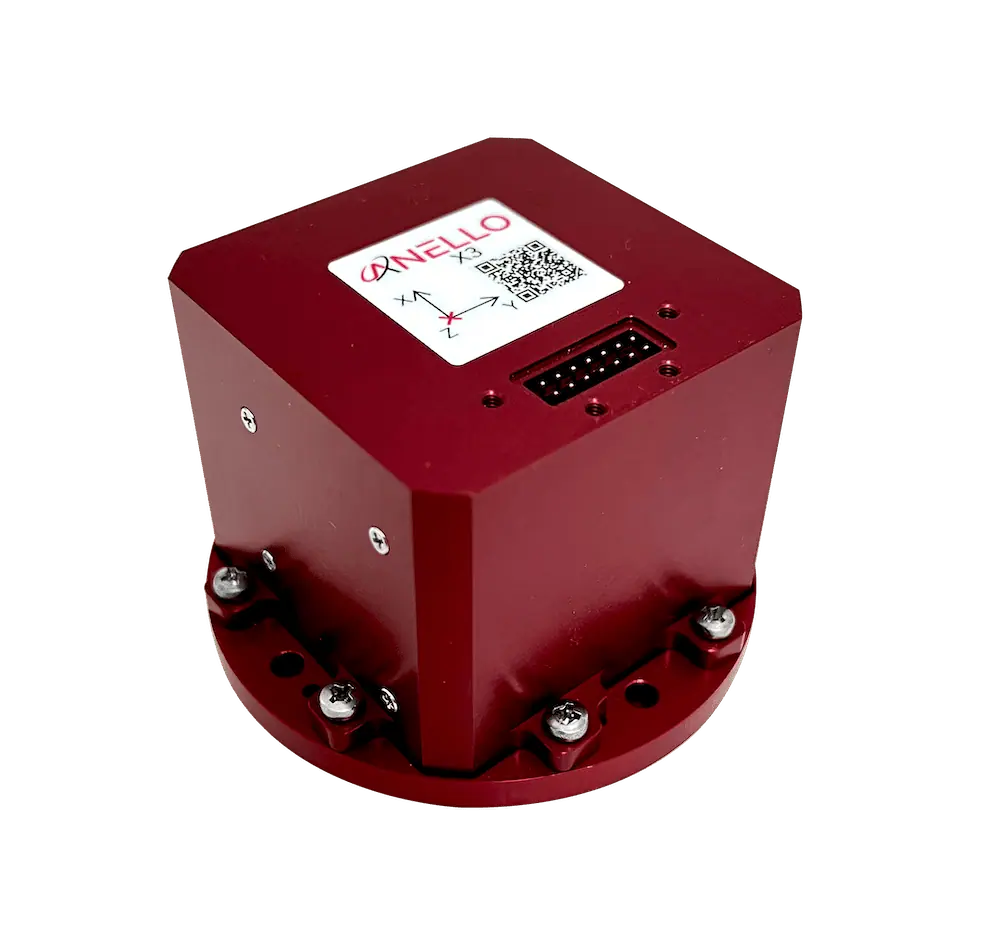
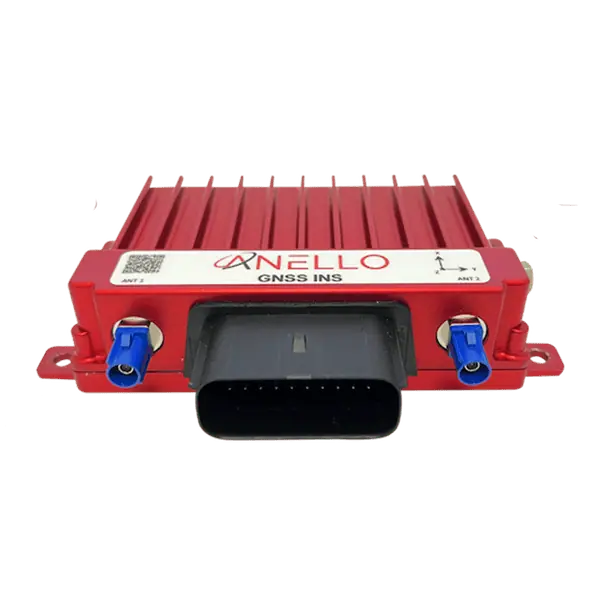
GNSS INS sem GPS da ANELLO Photonics.
Os sensores Lidar e radar proporcionam independência ambiental, mas aumentam a complexidade do sistema e os requisitos de energia. A navegação magnética e a navegação com referência ao terreno dependem da disponibilidade e qualidade dos mapas ambientais. Os sistemas multissensores oferecem a maior resiliência, mas requerem integração avançada e algoritmos de navegação.
O tipo de plataforma também influencia a seleção do sistema. Os sistemas de navegação UAV priorizam sensores leves e taxas de atualização rápidas, enquanto as plataformas terrestres e marítimas podem acomodar cargas úteis de sensores maiores. Os sistemas de navegação subaquática enfatizam a estabilidade a longo prazo e o baixo desvio na ausência de atualizações externas.
Normas e considerações relevantes
As tecnologias de navegação sem GNSS para sistemas não tripulados geralmente estão alinhadas com as normas de defesa e aeroespaciais que regem o desempenho, a resiliência e a segurança da navegação. As normas relevantes incluem especificações militares que abordam o posicionamento garantido, a compatibilidade eletromagnética e a resiliência contra interferências e falsificações. A interoperabilidade e a modularidade são considerações essenciais para a integração em arquiteturas de sistemas não tripulados existentes.
As soluções de navegação garantidas enfatizam cada vez mais a cibersegurança, a integridade do sinal e a robustez contra ataques de falsificação. Os algoritmos de navegação devem detetar anomalias, rejeitar entradas corrompidas e manter uma operação segura em condições degradadas. À medida que os níveis de autonomia aumentam, a navegação sem GNSS torna-se uma capacidade fundamental que apoia a tomada de decisões fiáveis e a execução de missões.
As tecnologias de navegação e posicionamento sem GNSS continuam a evoluir à medida que os sistemas não tripulados se expandem para ambientes mais complexos e disputados. Os avanços em algoritmos de fusão de sensores, computação a bordo e modalidades alternativas de navegação estão a permitir uma navegação resiliente sem dependência de sinais de satélite nos domínios aéreo, terrestre, marítimo e subterrâneo.