Tecnologia de orientação autónoma para veículos não tripulados - UAV, USV, UGV, UUV
Encontre fabricantes de sistemas de orientação de drones, permitindo que as plataformas aéreas, terrestres e marítimas não tripuladas realizem navegação autónoma, execução de missão adaptável e planeamento de trajetória resiliente com o mínimo ou nenhum contributo humano.
Se você projeta, constrói ou fornece Sistemas de orientação, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Tecnologia de orientação autónoma para veículos não tripulados - UAV, USV, UGV, UUV
Visão geral por
Eleanor Widdows
Atualizado:
Os sistemas de orientação autónomos permitem que os veículos não tripulados que operam em domínios aéreos, terrestres e marítimos realizem uma navegação auto-dirigida, adaptação de missão em tempo real e planeamento de trajetória resiliente sem intervenção humana. Integrando dados de múltiplos sensores e fontes de posicionamento, as arquitecturas de orientação UxV fornecem controlo de precisão e consciência situacional, e algumas soluções funcionam mesmo em ambientes com sinais GNSS limitados ou negados.
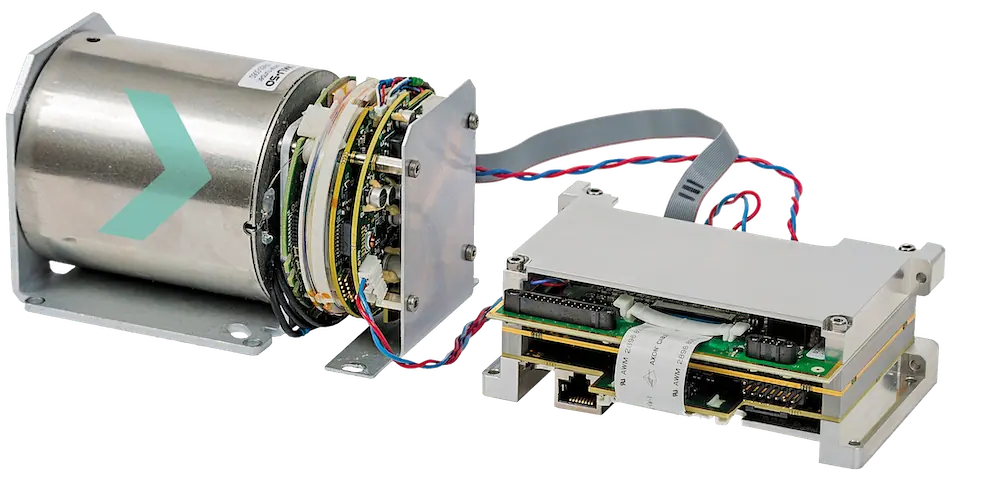
HGuide i700 MEMS IMU da Honeywell Aerospace
A orientação autónoma é essencial para uma vasta gama de plataformas não tripuladas, desde drones tácticos e UAVs de longa duração a UGVs, AUVs e UUVs. As principais tecnologias utilizadas nestas soluções incluem sensores inerciais, receptores GNSS/GPS, algoritmos de navegação visual e sistemas especializados de navegação submarina. Estes componentes são frequentemente combinados através da fusão de sensores para permitir um desempenho inteligente, adaptável e resistente à missão.
Sensores Inerciais e Sistemas de Navegação
Os sensores inerciais são fundamentais para muitos sistemas de orientação autónomos. As Unidades de Medição Inercial (IMU), que contêm acelerómetros e giroscópios, fornecem medições em tempo real da velocidade, aceleração e taxa angular. Estes fluxos de dados permitem o seguimento contínuo da posição e da atitude através de um processo conhecido como cálculo morto, permitindo que as plataformas não tripuladas mantenham a navegação durante interrupções do GNSS ou interferências de sinal.
Os sistemas de orientação avançados utilizam IMUs de nível tático ou de navegação, capazes de manter baixas taxas de desvio durante períodos prolongados. Para UAVs e UGVs, a navegação inercial assegura a fidelidade do controlo durante manobras dinâmicas ou durante a transição através de áreas comprometidas pelo GPS, tais como túneis, desfiladeiros ou ambientes urbanos. Para os veículos subaquáticos, onde os sinais de navegação externos estão totalmente ausentes, os sistemas inerciais servem como método primário para estimar a posição entre as fixações acústicas.
Muitas soluções de orientação combinam sensores inerciais com magnetómetros, barómetros e receptores GNSS, aumentando a precisão e melhorando a tolerância a falhas. As configurações de IMU redundantes e os suportes isolados de vibrações asseguram ainda mais o funcionamento robusto em condições de elevado choque e vibração, tipicamente encontradas em aplicações militares e aeroespaciais.
Orientação baseada em GPS/GNSS
A navegação por satélite desempenha um papel vital na orientação autónoma de sistemas não tripulados aéreos, terrestres e de superfície. Os receptores GNSS – capazes de aceder às constelações GPS, GLONASS, Galileo e/ou BeiDou, fornecem a referência posicional necessária para o seguimento de waypoints, geofencing e operações coordenadas multiplataforma.
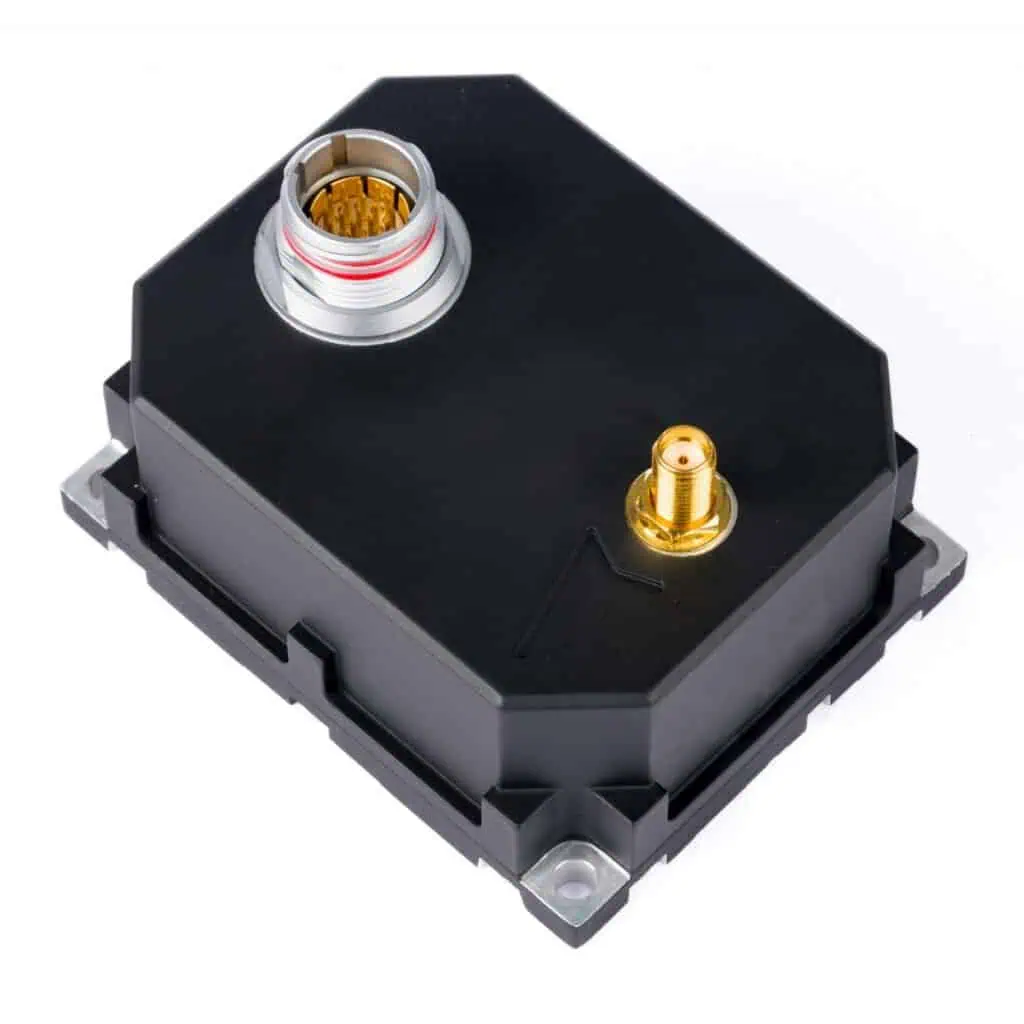
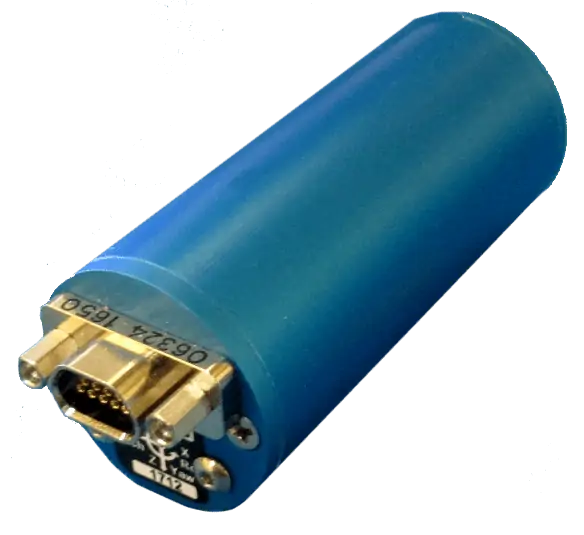
Piloto automático VECTOR-400 da UAV Navigation-Grupo Oesía
As capacidades GNSS avançadas, como o Real-Time Kinematic (RTK) e o Precise Point Positioning (PPP), proporcionam uma precisão centimétrica adequada para descolagens e aterragens de precisão e manobras de acoplamento autónomas. As unidades GNSS de dupla frequência e de antena dupla melhoram a robustez do posicionamento e a estimativa do rumo, permitindo que os veículos mantenham uma orientação exacta mesmo em ambientes com GPS degradado.
No entanto, o GNSS é vulnerável ao empastelamento do sinal, à falsificação e aos efeitos de trajetória múltipla, particularmente na guerra urbana, na guerra eletrónica ou em operações em interiores. Para manter a continuidade da missão, os sistemas de orientação autónoma utilizam frequentemente uma integração GNSS/INS fortemente acoplada, permitindo que as plataformas transitem sem problemas entre o posicionamento absoluto e relativo sem perda de controlo.
Navegação baseada na visão e SLAM
A navegação visual desempenha um papel crucial em ambientes onde os sinais GNSS não estão disponíveis, são intermitentes ou deliberadamente interrompidos. Utilizando câmaras a bordo, LiDAR e, por vezes, radar, os sistemas não tripulados podem interpretar o que os rodeia e localizar a sua posição através da deteção de caraterísticas, análise de fluxo ótico e odometria visual.
Os algoritmos de Localização e Mapeamento Simultâneos (SLAM) permitem que os veículos autónomos construam mapas 3D detalhados do seu ambiente em tempo real, ao mesmo tempo que estimam a sua posição no mesmo. Esta abordagem é fundamental para a navegação em interiores, missões subterrâneas ou navegação através de vegetação densa onde o GNSS não consegue penetrar.
A navegação baseada na visão também suporta a deteção avançada de obstáculos, a classificação do terreno e o redireccionamento dinâmico. Nos drones autónomos, a navegação visual é muitas vezes utilizada em conjunto com dados inerciais para suportar a precisão do pairar, o voo em interiores ou o voo em zonas sem GPS. Para os robôs terrestres, a visão estéreo ou as câmaras de deteção de profundidade ajudam a interpretar as caraterísticas da superfície, os gradientes de declive e os perigos inesperados.
A computação periférica acelera o desempenho destes sistemas através do processamento de dados visuais a bordo, reduzindo a dependência de ligações de comunicação e permitindo a tomada de decisões em tempo real para evitar colisões e planear trajectórias.
Orientação submarina para AUVs e UUVs
Os ambientes subaquáticos apresentam um dos desafios mais complexos para a orientação autónoma. Na ausência de GPS/GNSS, os sistemas submarinos têm de confiar na navegação inercial, Doppler Velocity Logs (DVL), posicionamento acústico ou referenciação de terreno baseada em sonar para determinar a sua posição e navegar eficazmente.
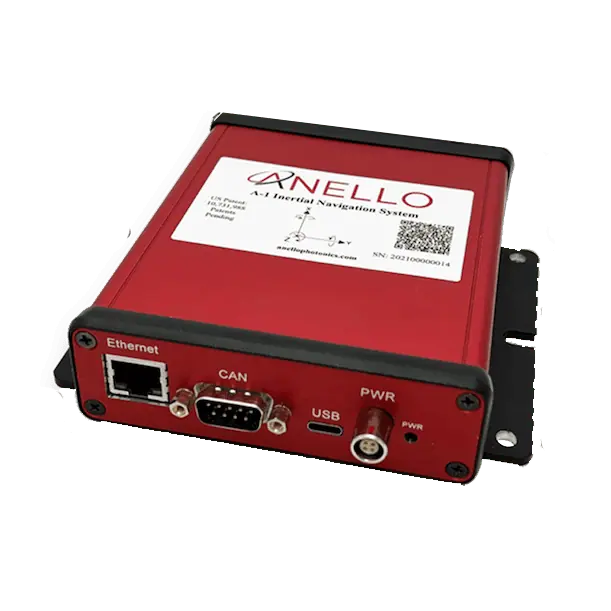
Sensor MEMS AHRS Certus Mini A da Advanced Navigation
Os sistemas inerciais, embora essenciais, sofrem desvios cumulativos ao longo do tempo. Para corrigir este facto, os AUVs e os UUVs utilizam DVLs para medir a velocidade em relação ao fundo do mar e sistemas acústicos, tais como matrizes de linha de base ultracurta (USBL), linha de base curta (SBL) e linha de base longa (LBL) para receberem correcções de posição externas. Estas referências acústicas são frequentemente integradas com INS a bordo através de filtros Kalman para criar uma solução de navegação híbrida com precisão e fiabilidade a longo prazo.
A navegação relativa ao terreno (TRN) é também empregue por veículos submarinos, utilizando sonares prospectivos ou ecobatímetros multifeixe para fazer corresponder o perfil do fundo do mar a mapas batimétricos conhecidos. Isto permite uma localização precisa em áreas onde os transponders acústicos não estão disponíveis ou não são práticos.
Estas tecnologias de orientação submarina são essenciais para operações como a inspeção de condutas, o mapeamento do fundo do mar, a exploração sob o gelo e a atracagem autónoma. Podem ser concebidas com arquitecturas tolerantes à pressão, de baixo consumo e totalmente fechadas, adequadas a missões de longa duração em águas profundas ou turbulentas.
Autonomia integrada e fusão de sensores
As plataformas de orientação autónoma podem basear-se em estruturas de fusão de sensores em tempo real que integram dados de sensores inerciais, GNSS, fontes visuais e outros dados ambientais. Estes motores de fusão calculam uma solução de navegação robusta e continuamente actualizada, assegurando que os veículos não tripulados mantêm o controlo e a consciência situacional em ambientes complexos.
Os sistemas de orientação modernos podem utilizar a previsão baseada em IA para se adaptarem aos parâmetros da missão, detectarem falhas e perigos e reagirem a condições inesperadas com uma latência mínima. Esta autonomia é essencial para uma vasta gama de casos de utilização, incluindo a coordenação de enxames de UAV, vigilância marítima de longo alcance, operações militares de alto risco e tarefas de inspeção industrial em áreas remotas.
A Silicon Sensing expande a sua parceria de distribuição de longa data com a Althen para reforçar a cobertura na América do Norte e melhorar o acesso global aos seus sensores inerciais de elevado desempenho e à sua experiência em integração
O programa VANTAGE, apoiado pelo Fundo Europeu de Defesa, tem por objetivo fornecer uma plataforma europeia modular e interoperável de drones tácticos para missões modernas de defesa e segurança