Proszę znaleźć producentów systemów naprowadzania dronów, umożliwiających bezzałogowym platformom powietrznym, naziemnym i morskim autonomiczną nawigację, adaptacyjne wykonywanie misji i elastyczne planowanie ścieżki przy minimalnym lub zerowym udziale człowieka.
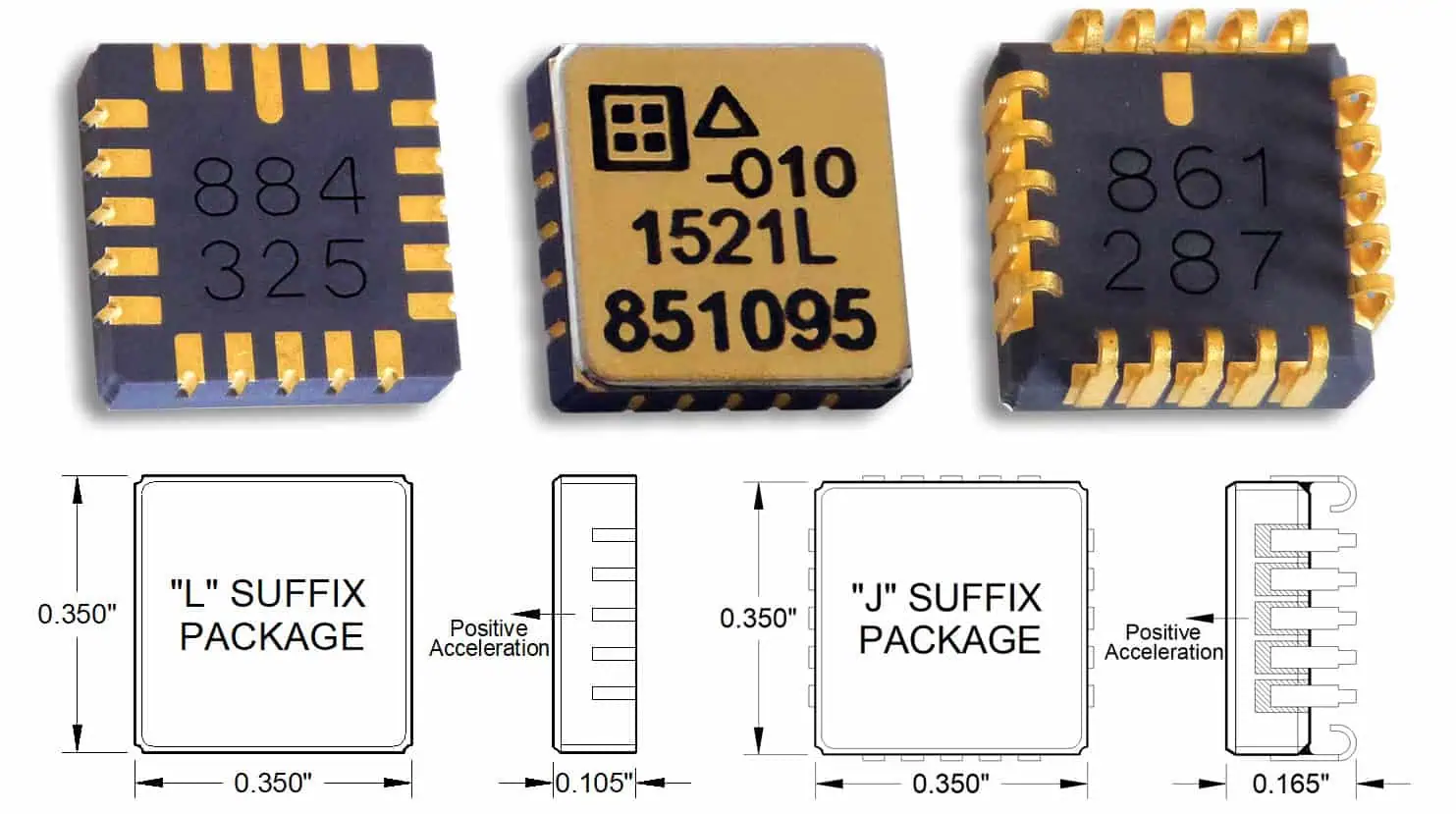
Wysokoprecyzyjne akcelerometry MEMS do bezzałogowych statków powietrznych i systemów bezzałogowych wykorzystywanych w zastosowaniach komercyjnych, przemysłowych i wojskowych
Rozwiązania sprzętowe dla bezzałogowych statków powietrznych: systemy napędowe i paliwowe, serwomechanizmy i kontrolery lotu, rozwiązania obrazujące, wyrzutnie i spadochrony
Jeśli projektujesz, budujesz lub dostarczasz Systemy naprowadzania, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Autonomiczne systemy naprowadzania pozwalają bezzałogowym pojazdom działającym w przestrzeni powietrznej, naziemnej i morskiej na samodzielną nawigację, adaptację misji w czasie rzeczywistym i elastyczne planowanie ścieżki bez udziału człowieka. Integrując dane z wielu czujników i źródeł pozycjonowania, architektury naprowadzania UxV zapewniają precyzyjną kontrolę i świadomość sytuacyjną, a niektóre rozwiązania działają nawet w środowiskach o ograniczonych lub zablokowanych sygnałach GNSS.
HGuide i700 MEMS IMU firmy Honeywell Aerospace.
Autonomiczne naprowadzanie jest niezbędne dla szerokiej gamy platform bezzałogowych, od dronów taktycznych i bezzałogowych statków powietrznych o dużej wytrzymałości po pojazdy UGV, AUV i UUV. Kluczowe technologie wykorzystywane w tych rozwiązaniach obejmują czujniki inercyjne, odbiorniki GNSS/GPS, algorytmy nawigacji wizualnej i specjalistyczne systemy nawigacji podwodnej. Komponenty te są często łączone za pomocą fuzji czujników, aby zapewnić inteligentną, elastyczną i odporną na misje wydajność.
Czujniki inercyjne i systemy nawigacji
Czujniki inercyjne mają fundamentalne znaczenie dla wielu autonomicznych systemów naprowadzania. Inercyjne jednostki pomiarowe (IMU), które zawierają akcelerometry i żyroskopy, zapewniają pomiary prędkości, przyspieszenia i prędkości kątowej w czasie rzeczywistym. Te strumienie danych umożliwiają ciągłe śledzenie pozycji i położenia w procesie znanym jako “dead reckoning”, pozwalając platformom bezzałogowym na utrzymanie nawigacji podczas awarii GNSS lub zakłóceń sygnału.
Zaawansowane systemy naprowadzania wykorzystują IMU klasy taktycznej lub nawigacyjnej, zdolne do utrzymywania niskiego dryftu przez dłuższy czas. W przypadku UAV i UGV nawigacja bezwładnościowa zapewnia wierność sterowania podczas dynamicznych manewrów lub podczas przechodzenia przez obszary o słabym zasięgu GPS, takie jak tunele, kaniony lub środowiska miejskie. W przypadku pojazdów podwodnych, gdzie zewnętrzne sygnały nawigacyjne są całkowicie nieobecne, systemy inercyjne służą jako podstawowa metoda szacowania pozycji między poprawkami akustycznymi.
Wiele rozwiązań nawigacyjnych łączy czujniki inercyjne z magnetometrami, barometrami i odbiornikami GNSS, zwiększając dokładność i poprawiając odporność na błędy. Nadmiarowe konfiguracje IMU i izolowane od drgań mocowania dodatkowo zapewniają niezawodne działanie w warunkach silnych wstrząsów i wibracji, typowych dla zastosowań wojskowych i lotniczych.
Naprowadzanie oparte na GPS/GNSS
Nawigacja satelitarna odgrywa istotną rolę w autonomicznym naprowadzaniu powietrznych, naziemnych i nawodnych systemów bezzałogowych. Odbiorniki GNSS – zdolne do uzyskania dostępu do konstelacji GPS, GLONASS, Galileo i/lub BeiDou, zapewniają odniesienie pozycyjne wymagane do śledzenia punktów trasy, geofencing i skoordynowanych operacji wieloplatformowych.
Autopilot VECTOR-400 firmy UAV Navigation-Grupo Oesía.
Zaawansowane funkcje GNSS, takie jak Real-Time Kinematic (RTK) i Precise Point Positioning (PPP), zapewniają centymetrową dokładność odpowiednią do precyzyjnego startu, lądowania i autonomicznych manewrów dokowania. Jednostki GNSS z podwójną częstotliwością i podwójną anteną zwiększają niezawodność pozycjonowania i szacowania kursu, umożliwiając pojazdom utrzymanie dokładnej orientacji nawet w środowiskach zdegradowanych przez GPS.
GNSS jest jednak podatny na zagłuszanie sygnału, spoofing i efekty wielościeżkowe, szczególnie w przypadku wojny miejskiej, wojny elektronicznej lub operacji w pomieszczeniach. Aby zachować ciągłość misji, autonomiczne systemy naprowadzania często wykorzystują ścisłą integrację GNSS/INS, umożliwiając platformom płynne przechodzenie między pozycjonowaniem bezwzględnym i względnym bez utraty kontroli.
Nawigacja oparta na wizji i SLAM
Nawigacja wizualna odgrywa kluczową rolę w środowiskach, w których sygnały GNSS są niedostępne, przerywane lub celowo zakłócane. Korzystając z kamer pokładowych, LiDAR, a czasem radaru, systemy bezzałogowe mogą interpretować swoje otoczenie i lokalizować swoją pozycję poprzez wykrywanie cech, analizę przepływu optycznego i odometrię wizualną.
Algorytmy jednoczesnej lokalizacji i mapowania (SLAM) umożliwiają autonomicznym pojazdom tworzenie szczegółowych map 3D ich otoczenia w czasie rzeczywistym, jednocześnie szacując ich pozycję w nim. Takie podejście ma kluczowe znaczenie dla nawigacji w pomieszczeniach, misji podziemnych lub nawigacji przez gęstą roślinność, gdzie GNSS nie może przeniknąć.
Nawigacja oparta na wizji obsługuje również zaawansowane wykrywanie przeszkód, klasyfikację terenu i dynamiczną zmianę trasy. W autonomicznych dronach nawigacja wizualna jest często wykorzystywana w połączeniu z danymi inercyjnymi w celu wsparcia precyzyjnego zawisu, lotu w pomieszczeniach lub lotu w strefach pozbawionych GPS. W przypadku robotów naziemnych, stereowizja lub kamery z czujnikami głębi pomagają interpretować cechy powierzchni, nachylenia zboczy i nieoczekiwane zagrożenia.
Edge computing przyspiesza działanie tych systemów poprzez przetwarzanie danych wizualnych na pokładzie, zmniejszając zależność od łączy komunikacyjnych i umożliwiając podejmowanie decyzji w czasie rzeczywistym w celu uniknięcia kolizji i planowania ścieżki.
Nawigacja podwodna dla pojazdów AUV i UUV
Środowiska podwodne stanowią jedno z najbardziej złożonych wyzwań dla autonomicznego naprowadzania. W przypadku braku GPS/GNSS, systemy podwodne muszą polegać na nawigacji inercyjnej, logach prędkości Dopplera (DVL), pozycjonowaniu akustycznym lub odniesieniach do terenu opartych na sonarze, aby określić swoją pozycję i skutecznie nawigować.
Czujnik Certus Mini A MEMS AHRS firmy Advanced Navigation.
Systemy inercyjne, choć niezbędne, z czasem doświadczają skumulowanego dryfu. Aby to skorygować, pojazdy AUV i UUV wykorzystują DVL do pomiaru prędkości względem dna morskiego oraz systemy akustyczne, takie jak tablice Ultra-Short Baseline (USBL), Short Baseline (SBL) i Long Baseline (LBL) do odbierania zewnętrznych poprawek pozycji. Te odniesienia akustyczne są często zintegrowane z pokładowym INS za pomocą filtrów Kalmana, aby stworzyć hybrydowe rozwiązanie nawigacyjne o długoterminowej dokładności i niezawodności.
Nawigacja zależna od terenu (TRN) jest również stosowana w pojazdach podwodnych, wykorzystując sonar naprzód lub echosondy wielowiązkowe w celu dopasowania profilu dna morskiego do znanych map batymetrycznych. Pozwala to na precyzyjną lokalizację w obszarach, w których transpondery akustyczne nie są dostępne lub praktyczne.
Te podwodne technologie naprowadzania są niezbędne w operacjach takich jak inspekcja rurociągów, mapowanie dna morskiego, eksploracja pod lodem i autonomiczne dokowanie. Mogą być zaprojektowane z odpornymi na ciśnienie, energooszczędnymi i w pełni zamkniętymi architekturami odpowiednimi do długotrwałych misji na głębokich lub burzliwych wodach.
Zintegrowana autonomia i fuzja czujników
Autonomiczne platformy naprowadzania mogą opierać się na strukturach fuzji czujników w czasie rzeczywistym, które integrują dane z czujników inercyjnych, GNSS, źródeł wizualnych i innych danych środowiskowych. Te silniki fuzji obliczają solidne i stale aktualizowane rozwiązanie nawigacyjne, zapewniając, że bezzałogowe pojazdy utrzymują kontrolę i świadomość sytuacyjną w złożonych środowiskach.
Nowoczesne systemy naprowadzania mogą wykorzystywać przewidywanie oparte na sztucznej inteligencji, aby umożliwić im dostosowanie się do parametrów misji, wykrywanie usterek i zagrożeń oraz reagowanie na nieoczekiwane warunki z minimalnym opóźnieniem. Taka autonomia jest niezbędna dla szerokiego zakresu zastosowań, w tym koordynacji roju UAV, nadzoru morskiego dalekiego zasięgu, operacji wojskowych wysokiego ryzyka i zadań inspekcji przemysłowej w odległych obszarach.
Silicon Sensing rozszerza swoje wieloletnie partnerstwo dystrybucyjne z Althen, aby wzmocnić zasięg w Ameryce Północnej i poprawić globalny dostęp do wysokowydajnych czujników inercyjnych i wiedzy specjalistycznej w zakresie integracji
Wspierany przez Europejski Fundusz Obronny program VANTAGE ma na celu dostarczenie modułowej, interoperacyjnej europejskiej platformy dronów taktycznych dla nowoczesnych misji obronnych i bezpieczeństwa.