Nawigacja i pozycjonowanie bez dostępu do GNSS dla systemów bezzałogowych
Znajdź dostawców, producentów i twórców technologii nawigacji bez GNSS. Systemy nawigacji i pozycjonowania bez GNSS umożliwiają niezawodne działanie platform bezzałogowych, gdy sygnały nawigacyjne z satelitów są niedostępne, osłabione lub celowo zakłócane. Technologie te mają kluczowe znaczenie dla zapewnienia pozycjonowania, nawigacji i pomiaru czasu w środowiskach o ograniczonej dostępności sygnału, zagraconych i zakłóconych w przestrzeni powietrznej, lądowej, powierzchniowej i podwodnej.
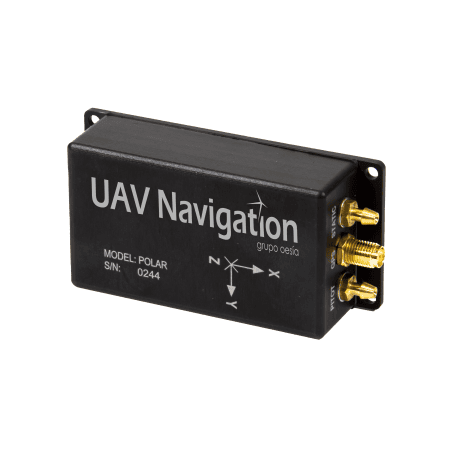
Wysokoprecyzyjny system pozycjonowania w czasie rzeczywistym dla autonomicznych bezzałogowych statków powietrznych i robotów działających w środowiskach pozbawionych sygnału GPS
Jeśli projektujesz, budujesz lub dostarczasz Nawigacja i pozycjonowanie bez GPS/GNSS, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Nawigacja i pozycjonowanie bez dostępu do GNSS dla systemów bezzałogowych
Przegląd według
Eleanor Widdows
Aktualizacja:
Technologia nawigacji i pozycjonowania bez wykorzystania GNSS umożliwia systemom bezzałogowym określanie pozycji, prędkości i orientacji bez konieczności korzystania z sygnałów GPS lub innych sygnałów nawigacji satelitarnej. Technologie te mają kluczowe znaczenie, ponieważ bezzałogowe platformy powietrzne, naziemne, powierzchniowe i podwodne coraz częściej muszą działać w środowiskach, w których GNSS jest niedostępny, ma ograniczoną skuteczność lub jest celowo zakłócany przez zakłócenia lub spoofingu.
Dzięki wykorzystaniu pokładowych czujników, przetwarzania danych i alternatywnych metod nawigacji, nawigacja bez GNSS zapewnia niezawodne pozycjonowanie w kanionach miejskich, pomieszczeniach zamkniętych i podziemnych, środowiskach morskich oraz w trudnych warunkach elektromagnetycznych. Podejście to zapewnia bezpieczną autonomię, ciągłość misji i niezawodność operacyjną, gdy nawigacja satelitarna jest niedostępna lub zawodna.
Trójwarstwowy pakiet nawigacyjny GPS-Denied dla bezzałogowych statków powietrznych firmy Honeywell Aerospace.
Gdzie potrzebna jest nawigacja bez GNSS
Obrona i operacje w warunkach zagrożenia
Nawigacja bez GNSS umożliwia pewne pozycjonowanie systemów bezzałogowych działających w warunkach zakłóceń GPS, spoofingu i ataków elektronicznych. Wojskowe bezzałogowe statki powietrzne i inne platformy wykorzystują te możliwości, aby utrzymać ciągłość nawigacji w spornych przestrzeniach powietrznych i nieprzyjaznych środowiskach elektromagnetycznych.
Autonomia w środowisku miejskim i zabudowanym
Pojazdy autonomiczne działające w kanionach miejskich napotykają blokady sygnału i zakłócenia wielodrożne spowodowane przez budynki. Nawigacja bez GNSS umożliwia bezpieczne działanie platform powietrznych i naziemnych, gdy ciągła nawigacja satelitarna jest niedostępna.
Operacje poszukiwawcze i ratownicze
Nawigacja bez GNSS umożliwia działanie systemów bezzałogowych w pomieszczeniach, pod ziemią lub na obszarach dotkniętych katastrofą, gdzie infrastruktura jest uszkodzona lub niedostępna. Funkcje te umożliwiają skuteczną nawigację w zawalonych budynkach, tunelach i gęsto zabudowanym terenie miejskim.
Operacje morskie i podwodne
W środowiskach podwodnych i przybrzeżnych z natury rzeczy brakuje dostępności GNSS. Autonomiczne pojazdy podwodne i platformy powierzchniowe wykorzystują metody nawigacji bez GNSS, aby utrzymać dokładne pozycjonowanie podczas długotrwałych misji.
Autonomia komercyjna i przemysłowa
Zastosowania przemysłowe, takie jak robotyka magazynowa, operacje górnicze, działania morskie i kontrola infrastruktury, korzystają z nawigacji bez GNSS. Środowiska te wymagają niezawodnego pozycjonowania niezależnego od sygnałów zewnętrznych w celu poprawy bezpieczeństwa i wydajności operacyjnej.
Rodzaje systemów nawigacyjnych bez GNSS
Systemy nawigacji inercyjnej
Systemy nawigacji inercyjnej zapewniają samodzielne pozycjonowanie poprzez obliczanie ruchu na podstawie danych z pokładowych czujników inercyjnych. Systemy te działają niezależnie od sygnałów zewnętrznych, co czyni je podstawowym elementem nawigacji bez GNSS w bezzałogowych platformach powietrznych, naziemnych, powierzchniowych i podwodnych.
Inercjalne jednostki pomiarowe
Jednostki pomiaru bezwładnościowego łączą akcelerometry i żyroskopy w celu pomiaru przyspieszenia liniowego i ruchu obrotowego. Jednostki IMU są podstawowymi komponentami nawigacji bez dostępu do GNSS, zapewniając dane o wysokiej częstotliwości do nawigacji zliczeniowej, szacowania położenia i śledzenia ruchu.
Zintegrowane systemy nawigacyjne GNSS/INS
Systemy GNSS/INS ściśle integrują nawigację inercyjną z nawigacją satelitarną, gdy jest ona dostępna, umożliwiając płynne przejście między operacjami wspomaganymi przez GNSS a operacjami bez dostępu do GNSS. W środowiskach spornych lub o obniżonej jakości podsystem inercyjny utrzymuje ciągłą nawigację, jednocześnie filtrując i odrzucając uszkodzone dane wejściowe GNSS, co sprawia, że GNSS/INS jest podstawową architekturą zapewniającą odporną i niezawodną nawigację.
System nawigacji bezwładnościowej Marins M5 GNSS-Denied INS FOG firmy Exail.
Zegary atomowe w skali chipowej
Zegary atomowe w skali chipowej zapewniają bardzo stabilne odniesienia czasowe na pokładzie, które zmniejszają dryft nawigacji inercyjnej podczas długotrwałych awarii GNSS. Po zintegrowaniu z systemami GNSS/INS i inercyjnymi zegary te poprawiają długotrwałą dokładność i odporność czasową bez zewnętrznej synchronizacji.
Systemy nawigacji oparte na wizji
Systemy nawigacji oparte na wizji wykorzystują kamery optyczne i przetwarzanie pokładowe do szacowania ruchu poprzez śledzenie cech wizualnych otoczenia. Systemy te doskonale nadają się do operacji bez GNSS w środowiskach miejskich, wewnętrznych i na niskich wysokościach, gdzie występuje wystarczająca struktura wizualna.
Systemy jednoczesnej lokalizacji i mapowania
Systemy jednoczesnej lokalizacji i mapowania umożliwiają platformom bezzałogowym tworzenie map nieznanych środowisk przy jednoczesnym szacowaniu ich położenia w tych środowiskach. Systemy SLAM wspierają autonomiczną nawigację w warunkach braku dostępu do GNSS, gdzie wcześniejsze mapy lub odniesienia bezwzględne są niedostępne.
Systemy nawigacji lidarowej
Systemy nawigacji Lidar wykorzystują aktywne czujniki laserowe do generowania trójwymiarowych danych środowiskowych do lokalizacji i mapowania. Systemy te wspierają wysoką dokładność nawigacji w środowiskach bez dostępu do GNSS, w tym w warunkach słabego oświetlenia lub ograniczonej widoczności.
Systemy nawigacji radarowej
Systemy nawigacji radarowej zapewniają niezawodne wykrywanie i lokalizację w środowiskach, w których występują niekorzystne warunki pogodowe, pył, dym lub słaba widoczność. Nawigacja radarowa jest powszechnie stosowana na platformach morskich i powietrznych, które wymagają dalekiego zasięgu, działania w każdych warunkach pogodowych i możliwości działania bez GNSS.
Systemy nawigacji magnetycznej
Systemy nawigacji magnetycznej wykorzystują przestrzenne zmiany pola magnetycznego Ziemi, aby umożliwić pozycjonowanie bez GNSS. W połączeniu z mapami magnetycznymi systemy te oferują pasywną nawigację w środowiskach, w których inne metody wykrywania są ograniczone.
Systemy nawigacji oparte na ukształtowaniu terenu
Systemy nawigacji oparte na ukształtowaniu terenu szacują pozycję poprzez korelację danych z czujników pokładowych z zapisanymi cyfrowymi mapami terenu lub wysokości. Systemy te są skuteczne w przypadku platform powietrznych i naziemnych operujących na niskich wysokościach w regionach pozbawionych dostępu do GNSS, o dobrze scharakteryzowanym ukształtowaniu terenu.
Systemy nawigacji astronomicznej
Systemy nawigacji astronomicznej określają pozycję poprzez obserwację gwiazd lub innych punktów odniesienia na niebie. Systemy te wspierają długotrwałe misje bez dostępu do GNSS, w których nie są dostępne sygnały nawigacyjne z ziemi ani sygnały satelitarne.
Systemy nawigacji wieloczujnikowej
Systemy nawigacji wieloczujnikowej integrują dane inercyjne, GNSS/INS, wizualne, lidarowe, radarowe, magnetyczne i terenowe. Dzięki połączeniu uzupełniających się metod wykrywania systemy te poprawiają niezawodność i ciągłość działania w różnych środowiskach, w których sygnał GNSS jest niedostępny.
Oprogramowanie do fuzji czujników
Oprogramowanie do fuzji czujników łączy dane z wielu czujników nawigacyjnych w jednolite rozwiązanie nawigacyjne. Algorytmy te są niezbędne do zarządzania niepewnością, korygowania dryfu i utrzymania niezawodnego pozycjonowania podczas awarii lub ataków GNSS.
Niezawodne i odporne systemy nawigacyjne
Niezawodne systemy nawigacyjne są zaprojektowane do działania pomimo zakłóceń GNSS, spoofingu i degradacji sygnału. Systemy te kładą nacisk na monitorowanie integralności, wykrywanie usterek i odporność działania, aby wspierać krytyczne operacje bezzałogowe w środowiskach objętych konfliktem.
Porównania i kompromisy
Wybór podejścia nawigacyjnego bez GNSS wiąże się z kompromisami między dokładnością, wytrzymałością, kosztem, rozmiarem, wagą i mocą. Systemy nawigacji inercyjnej są kompaktowe i samowystarczalne, ale podatne na błędy kumulacyjne. Nawigacja oparta na wizji oferuje wysoką względną dokładność, ale zależy od widoczności otoczenia i zasobów przetwarzania.
GPS-Denied GNSS INS firmy ANELLO Photonics.
Czujniki lidarowe i radarowe zapewniają niezależność od warunków środowiskowych, ale zwiększają złożoność systemu i zapotrzebowanie na energię. Nawigacja magnetyczna i nawigacja oparta na terenie zależą od dostępności i jakości map środowiskowych. Systemy wieloczujnikowe zapewniają najwyższą odporność, ale wymagają zaawansowanej integracji i algorytmów nawigacyjnych.
Na wybór systemu ma również wpływ typ platformy. Systemy nawigacyjne bezzałogowych statków powietrznych (UAV) priorytetowo traktują lekkie czujniki i szybkie tempo aktualizacji, podczas gdy platformy naziemne i morskie mogą pomieścić większe ładunki czujników. Podwodne systemy nawigacyjne kładą nacisk na długoterminową stabilność i niskie odchylenia przy braku zewnętrznych aktualizacji.
Odpowiednie normy i kwestie do rozważenia
Technologie nawigacyjne bez dostępu do GNSS dla systemów bezzałogowych często są zgodne z normami obronnymi i lotniczymi regulującymi wydajność nawigacji, odporność i bezpieczeństwo. Odpowiednie normy obejmują specyfikacje wojskowe dotyczące zapewnionego pozycjonowania, kompatybilności elektromagnetycznej oraz odporności na zakłócenia i spoofing. Interoperacyjność i modułowość są istotnymi czynnikami, które należy wziąć pod uwagę przy integracji z istniejącymi architekturami systemów bezzałogowych.
Rozwiązania zapewniające nawigację w coraz większym stopniu kładą nacisk na cyberbezpieczeństwo, integralność sygnału i odporność na ataki spoofingowe. Algorytmy nawigacyjne muszą wykrywać anomalie, odrzucać uszkodzone dane wejściowe i utrzymywać bezpieczne działanie w trudnych warunkach. Wraz ze wzrostem poziomu autonomii nawigacja bez GNSS staje się podstawową funkcją wspierającą podejmowanie wiarygodnych decyzji i realizację misji.
Technologie nawigacji i pozycjonowania bez GNSS ewoluują wraz z rozwojem systemów bezzałogowych w bardziej złożonych i kontrowersyjnych środowiskach. Postępy w algorytmach fuzji czujników, obliczeniach pokładowych i alternatywnych metodach nawigacji umożliwiają odporną nawigację bez konieczności polegania na sygnałach satelitarnych w przestrzeni powietrznej, lądowej, morskiej i podziemnej.