Inertial Measurement Units (IMU) for Drones & Unmanned Systems
Inertial Measurement Units (IMU) for drones and unmanned systems provide the high-rate inertial data required to stabilize UAVs, UGVs, USVs, and ROVs, supporting precise navigation in dynamic environments. Combining accelerometers, gyroscopes, and magnetometers, these subsystems deliver attitude, angular rate, vibration, and derived estimates essential for autopilots, payload stabilization, and GNSS-denied operation.
This category showcases manufacturers of industrial, tactical, and navigation-grade IMUs that use MEMS, Quartz, and FOG technologies to balance SWaP and drift performance across unmanned platforms.
If you design, build or supply Inertial Measurement Units (IMU), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
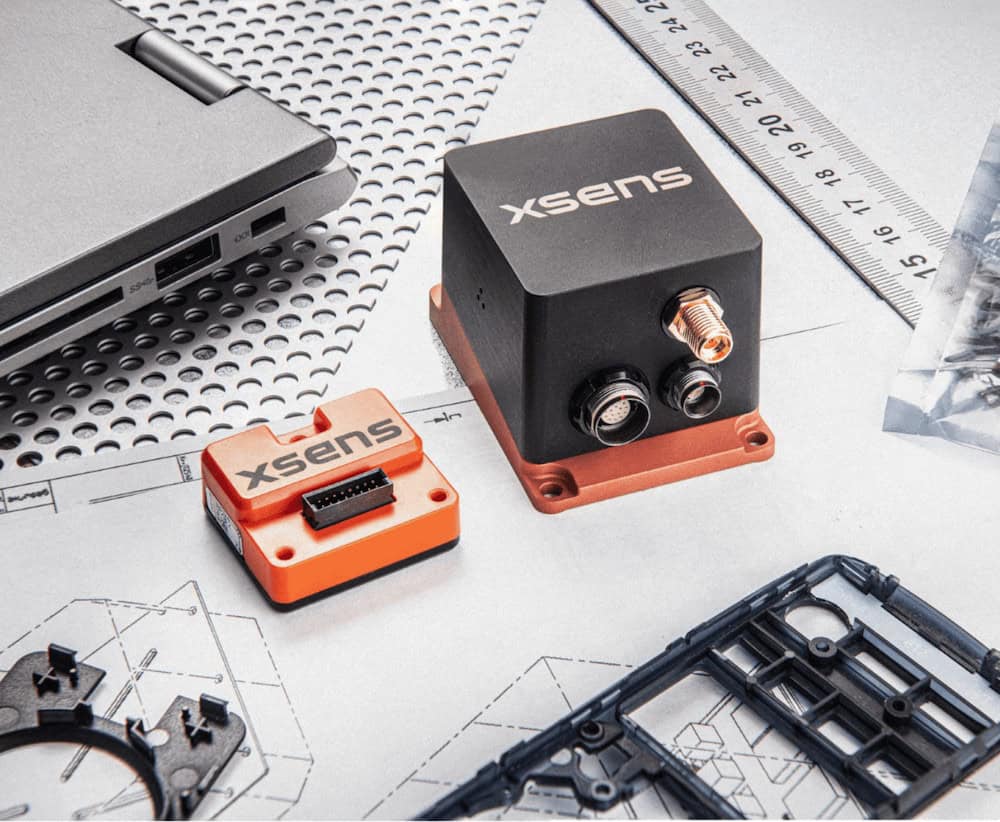
High-grade inertial measurement units for advanced UAV operations & stabilization
High-grade inertial measurement units for advanced UAV operations & stabilization
... ultra-compact InertialMeasurementUnits(IMU) developed for demanding UAV, stabilization,... ... The ITAR-free systems provide ultra-low latency, high bandwidth, and stable operation for EO/IR...
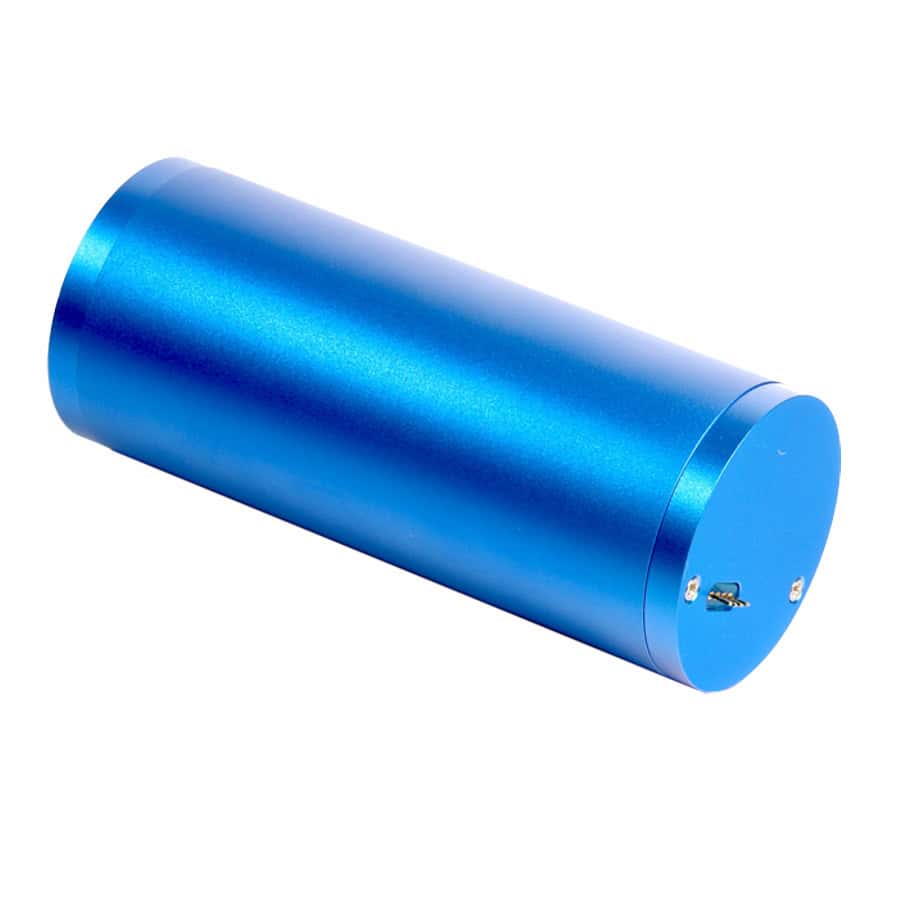
......curate motion sensing and orientation data for unmannedsystems operating in demanding... ..., and maritime drones, optimized for rugged operational environments. Housed in a compact cylinder...
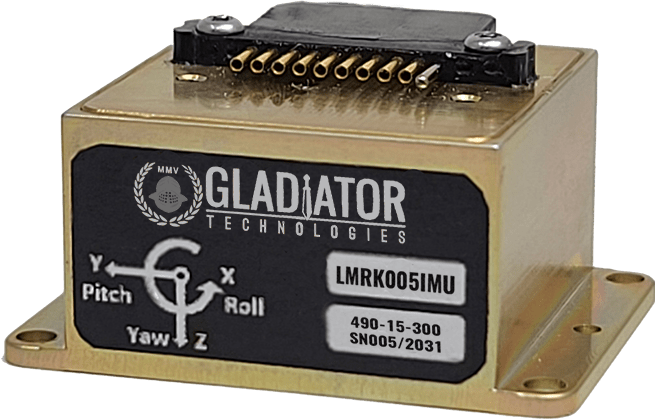
Triple-redundant inertial measurement unit for harsh environments
Triple-redundant inertial measurement unit for harsh environments
...MU is a rugged inertialmeasurement solution designed to withstand high levels of shock and... ...tor IP68-rated unit offers reliable protection against chemicals and salt spray, making it ideal for...
Advanced three-axis MEMS IMU with external GNSS capability
Advanced three-axis MEMS IMU with external GNSS capability
...family of MEMS inertialmeasurementunits utilize three-axis accelerometers and gyroscopes to... ...uirements, the unit is ideal for UAV, AUV & ROV navigation and control, platform orientation and...
...ance MEMS IMU(inertialmeasurementunit) that outputs three axes of angular rate and acceleration,... ...r high-dynamic measurementsystems, including aircraft control and dynamic transmission...
Inertial Measurement Units (IMU) for Drones & Unmanned Systems
Overview by
William Mackenzie
Updated:
Introduction to Inertial Measurement Units (IMUs) for Drones & Unmanned Systems
Inertial Measurement Units (IMUs) are sophisticated devices providing the deterministic data essential for stabilization, guidance, mapping, and precision control. Whether integrated into a multirotor Unmanned Aerial Vehicle (UAV), a subsea Autonomous Underwater Vehicle (AUV), or a tactical Unmanned Ground Vehicle (UGV), an IMU sensor continuously reports angular rate and linear acceleration. Where augmented with a magnetometer, they deliver crucial heading cues.
This data enables onboard computers to precisely infer a vehicle’s current attitude and motion state, ensuring reliable operation even when external sensors momentarily degrade or fail. As the operational complexity of unmanned applications increases, the IMU remains arguably the single most critical component in the entire vehicle control chain.
Core Engineering Principles of Inertial Measurement Units
At its core, an inertial measurement unit provides essential, high-frequency, platform-specific measurements that feed into the control and navigation loops.
What an IMU Measures
FI 200P Inertial Measurement Unit by FIBERPRO
Modern IMUs continuously report a highly reliable data stream crucial for rapid control loops and low-level perception tasks:
Three-axis linear acceleration: Measures platform-specific forces used to infer velocity and motion.
Three-axis angular rate (Gyroscope): Enables the control system to maintain stable attitude and dampen rotational disturbances.
Three-axis magnetic field (Magnetometer): When configured as an Attitude and Heading Reference System (AHRS), this supports long-term heading correction.
Derived Quantities: Often include attitude, vibration intensity, and position/velocity estimates when fused within a full Inertial Navigation System (INS).
Applications of IMUs Across Unmanned Systems
UAV IMUs
For UAVs, the inertial measurement unit is central to control and navigation. It provides the attitude and rotation data required for PID control loops and high-speed stabilization, compensating for turbulent airflow and propulsion vibration. Low gyroscope latency is non-negotiable for aircraft stability.
For GNSS-denied flight, UAVs operating in Intelligence, Surveillance, and Reconnaissance (ISR) roles or contested environments rely on IMUs for sustained inertial navigation, maintaining formation geometry, and reliable VTOL hover.
Additionally, these sensors can stabilize EO/IR (Electro-Optical/Infrared) and mapping payloads, maintaining a stable line-of-sight and providing high-speed feedback for gimbal motors.
UGV IMUs
UGVs depend heavily on inertial data when navigating tunnels, dense forests, or battlefield environments where GNSS is degraded or non-existent. Odometry fusion with wheel encoders and robust wheel-slip compensation are essential to prevent drift during navigation in GPS-denied terrain.
HGuide HG4930 S-Class IMU by Honeywell Aerospace
For autonomous driving and perception, the IMU synchronizes data across LiDAR and camera perception pipelines, providing high-speed localization data necessary for responsive path planning.
Critically, UGVs present a harsh environment with high vibration, thermal extremes, and EMI from radios, demanding highly ruggedized IMU housings and shock-isolating mounts.
IMUs for Underwater Vehicles
Unmanned Surface Vehicles (USVs) require IMUs for wave motion rejection, accurate heading and roll/pitch estimation, and seamless integration with marine autopilot and radar systems.
Unmanned Underwater Vehicles (UUVs), including AUVs and Remotely Operated Vehicles (ROVs), rely on the most accurate inertial sensors for their position estimation due to their lack of GNSS signals. Missions depend on IMU + Doppler Velocity Log (DVL) dead reckoning and fusion with LBL/USBL acoustic systems. High-end AUV missions often demand FOG-based IMU systems due to the need for low-drift long submerged transits.
For ROVs, these units provide real-time feedback to compensate for tether-induced motion disturbances and enable precise subsea manipulator and tool control.
IMU Categories & Sensor Grades
The performance of an inertial measurement unit for drone applications is typically categorized into defined grades, reflecting an engineering trade-off between cost, SWaP, and accuracy.
Industrial Grade IMUs
These devices provide adequate stability for smaller UAVs, portable UGVs, and compact USVs. They represent an excellent balance of cost and performance, excelling in applications where weight and cost constraints are paramount, such as commercial drone IMU models and low-cost mapping payloads.
FOG IMU U121D by MostaTech
Tactical Grade IMUs
Tactical grade IMUs offer a significant leap in performance over industrial grade sensors, drastically reducing drift and providing much higher environmental robustness. They typically feature bias stability up to two orders of magnitude better than their lower-cost counterparts.
This enhanced capability makes them essential for long-endurance UAV autopilot systems, high-precision EO/IR payload stabilization, and maritime unmanned platforms that require tighter motion estimation. To achieve this precision, these IMUs often leverage FOG technology or highly refined, thermally compensated Quartz/Silicon MEMS sensors.
Navigation Grade IMUs
Navigation grade IMUs offer extremely low drift and long-term accuracy without requiring frequent external updates. While these units are significantly larger and more costly, they enable mission profiles simply not possible with lower grades. Their primary applications include AUV navigation on long, complex submerged missions, high-end UGVs operating in GNSS-denied areas, and large defense UAVs requiring precise dead reckoning.
It is important to note, however, that many high-end AUVs often employ sophisticated tactical grade INS (often FOG-based) fused with DVLs to achieve navigation-grade performance in a SWaP-optimized format, rather than integrating a full-size unit.
Specialty & Ruggedized IMUs
For extreme operational environments, specialized designs are necessary. Deep-sea IMUs incorporate high-pressure tolerant housings, corrosion-resistant construction, and magnetic shielding for underwater navigation. Radiation-hardened IMUs are designed for orbital or high-radiation environments where conventional MEMS components would quickly degrade.
IMU Subsystems & Components
The reliability of any inertial measurement unit for drones and unmanned systems stems from the tightly integrated components.
Accelerometers and Gyroscopes
Accelerometers and gyroscopes, including MEMS accelerometers, are widely adopted across unmanned aerial, ground, and marine platforms, delivering dependable inertial measurement while minimizing SWaP (Size, Weight, and Power) and overall system cost efficiency.
High-End Sensors
Motus Miniature MEMS IMU by Advanced Navigation
For demanding applications requiring ultra-low drift or extended navigation performance, higher-grade devices employ specialized technology. This includes Quartz MEMS or Fiber-Optic Gyros (FOGs), the latter being a common choice for tactical UAV IMU and AUV systems due to their superior performance in a SWaP-constrained package. Ring-Laser Gyros (RLGs) are generally reserved for very large, strategic platforms.
Supporting Electronics
This includes magnetometers for an external heading reference, embedded processors for performing filtering and temperature/bias compensation, and sophisticated calibration models to remove non-linearity effects.
Key IMU Performance Parameters
When specifying a drone IMU, engineers must consider a range of technical metrics that dictate performance under operational conditions:
Parameter
Impact on Performance
Bias Stability
Defines the minimum achievable drift rate. Critical for long-duration missions.
Angular Random Walk (ARW)
Quantifies the noise and dictates short-term attitude accuracy.
Bandwidth and Latency
Determines responsiveness. Critical for high-speed stabilization and control loops (e.g., in multirotors).
Scale Factor Accuracy
Determines how accurately the sensor measures movement across its dynamic range.
Dynamic Range
The maximum G-force or rotation rate the sensor can tolerate before saturation.
Shock and Vibration Tolerance
Measures robustness to the operational environment (e.g., UGV engines, propeller wash).
Emerging Trends in IMU Sensors for Drones
The future of inertial sensing is being driven by higher autonomy and resilience requirements. AI/Edge Processing is increasingly being leveraged at the IMU’s edge processor for signal denoising, smart calibration, and enhanced visual-inertial odometry to further improve accuracy and resilience without increasing SWaP.
These rising autonomy requirements, particularly in contested or fully autonomous environments, will drive the demand for inertial units with even greater resilience in contested EM environments, higher data rates, and stronger dynamic load performance.
Furthermore, emerging research in Quantum and Photonic IMUs promises to eventually deliver navigation-grade accuracy in a SWaP profile suitable for small unmanned platforms, potentially revolutionizing long-duration, GNSS-independent navigation.
SBG Systems has launched a new tactical-grade sensor that delivers higher accuracy, reduced latency, and real-time mechanical spectrum analysis for harsh operating environments
Making its exhibition debut at Eurosatory 2026 in Paris, Silicon Sensing will showcase its robust, non-ITAR MEMS inertial measurement units and precision gyroscopes developed to meet demanding international defence requirements
MostaTech will exhibit its line of miniature fiber optic gyroscopes and inertial systems engineered to provide precise navigation and stabilization within extreme mechanical environments at the upcoming Eurosatory defense exhibition
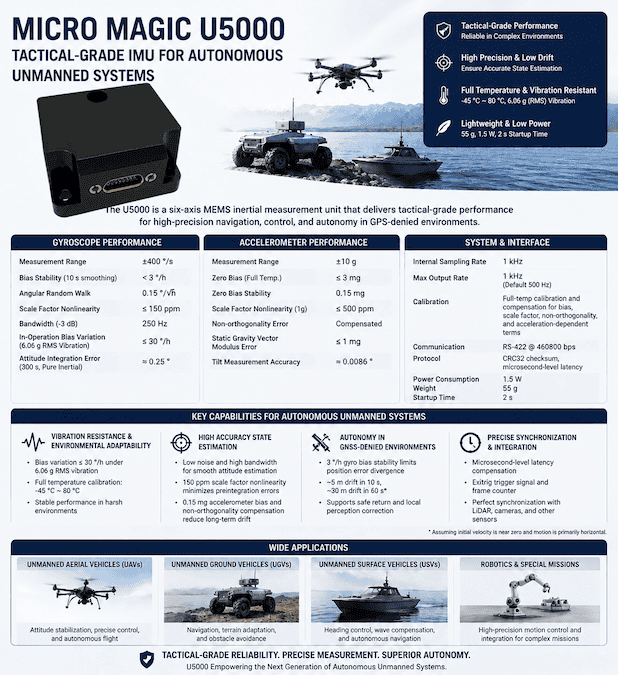
Micro-Magic’s U5000 tactical-level IMU combines low-noise sensing, vibration resistance, and high-rate data acquisition for navigation and control in autonomous unmanned platforms
Gladiator Technologies presents its 2026 exhibition calendar, highlighting a series of appearances at major aerospace and defense events where the company will showcase its latest inertial sensors and systems
VectorNav has introduced 90G and 250G accelerometers and 4000°/sec gyroscope ranges across its tactical IMU and INS platforms, supporting reliable navigation in high-G, GPS-denied environments for interceptor, hypersonic, and counter-UAS applications
Mar 26, 2026
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.