
























Showcase your capabilities
If you design, build or supply Guidance Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Find drone guidance system manufacturers, enabling unmanned aerial, ground, and maritime platforms to perform autonomous navigation, adaptive mission execution, and resilient path planning with minimal or no human input.
Read the Technology Overview







High-Accuracy Navigation & Positioning Solutions for Unmanned & Autonomous Vehicles


Unmanned Aerial Vehicle Platforms for Civilian & Defense Applications

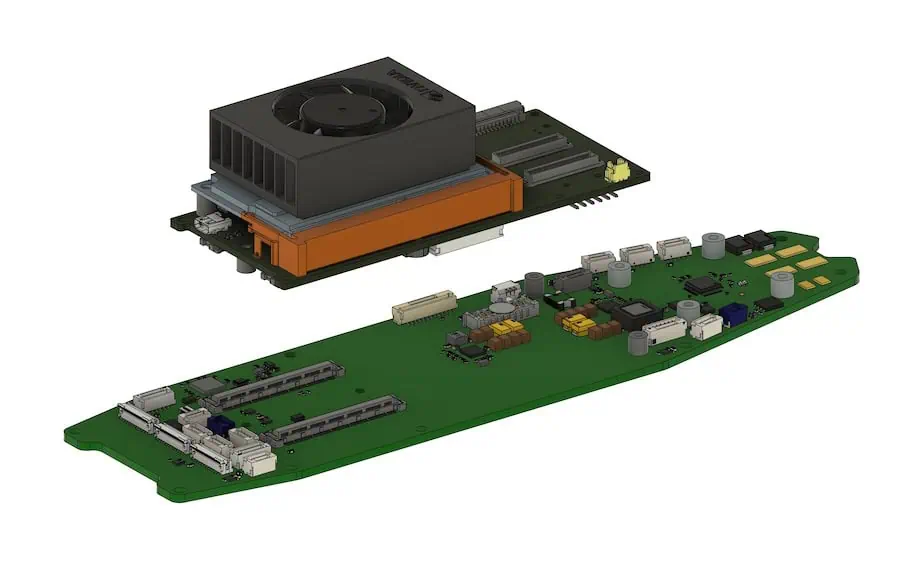
Rugged Computing Solutions for Mission-Critical Command, Control & Communications

Industrial & Automotive-Grade Inertial Sensing Systems for UAVs, Robotics & Autonomous Vehicles

Precision Positioning & Orientation Solutions for Unmanned Applications

Resilient, High-Precision Inertial Systems for Autonomous Aerial Systems & Robotics

Guidance, Navigation & Control Solutions (GNC) for Drones & UAVs

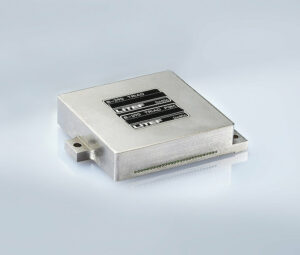
High-Accuracy MEMS Accelerometers for UAVs & Unmanned Systems used in Commercial, Industrial & Military Applications

BVLOS Solutions for UAS & UAM: Fuel Cells, Radar, Navigation Sensors, Flight Control & SATCOM

Robotics and Subsea Technologies for Defense, Commercial & Science Applications

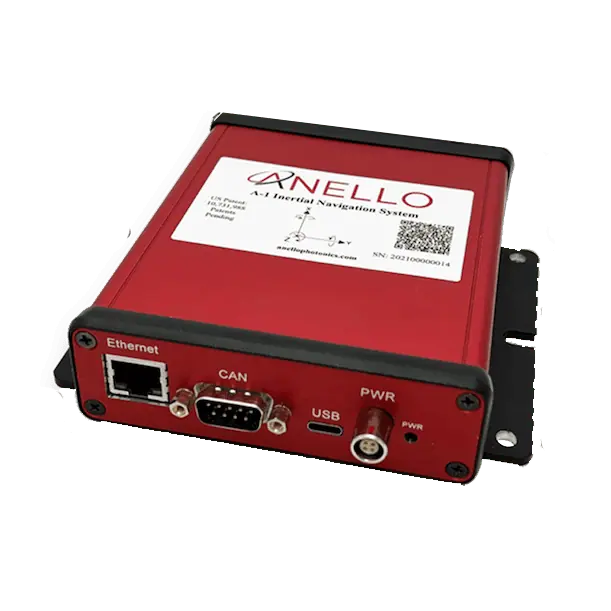
High-Performance Inertial Navigation Systems (INS) for Unmanned Systems

Inertial Navigation Sensors: MEMS IMU, Accelerometers, Gyroscopes, AHRS, GPS-INS & Point Cloud Generation

Inertial Navigation Systems, INS/GPS, AHRS, and IMU Sensors for Unmanned Systems


Precise Positioning for Unmanned Vehicles: GPS & GNSS Receivers, Antennas & Inertial Systems


UAV Autopilot Flight Controllers, Ground Stations, ESC Controllers & Tracking Antennas
High-Precision Digital MEMS Accelerometers Gyros for Demanding Unmanned Systems Operating In Harsh Environments

High Performance FOG and Quartz MEMS Inertial Sensors - Gyros, IRU, IMU, INS


MEMS Inertial Sensors: IMUs, GPS-Aided INS, Gyroscopes, Accelerometers, AHRS

Tracking, Navigation, Positioning and Communication Sensors for AUV, ROV, USV

Professional UAV Components & Sensors: Drone Flight Controllers, GNSS Modules, Telemetry Solutions

Cutting-Edge Drone Autopilots & UAS Platforms | Hardware & Software Solutions for Drones & Unmanned Systems

Cutting-Edge Flight Controllers, Sensors, and Other Electronics Technologies for Drones & Robotics

GNSS Positioning & Navigation Systems, Mobile Mapping UAV LiDAR & Unmanned Surface Vehicles

MEMS Inertial Sensor Solutions, IMUs, Gyroscopes and MEMS Accelerometers for Unmanned Vehicles
If you design, build or supply Guidance Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Autonomous guidance systems allow unmanned vehicles operating in aerial, ground, and maritime domains to undertake self-directed navigation, real-time mission adaptation, and resilient path planning without human input. Integrating data from multiple sensors and positioning sources, UxV guidance architectures deliver precision control and situational awareness, and some solutions even work in environments with limited or denied GNSS signals.

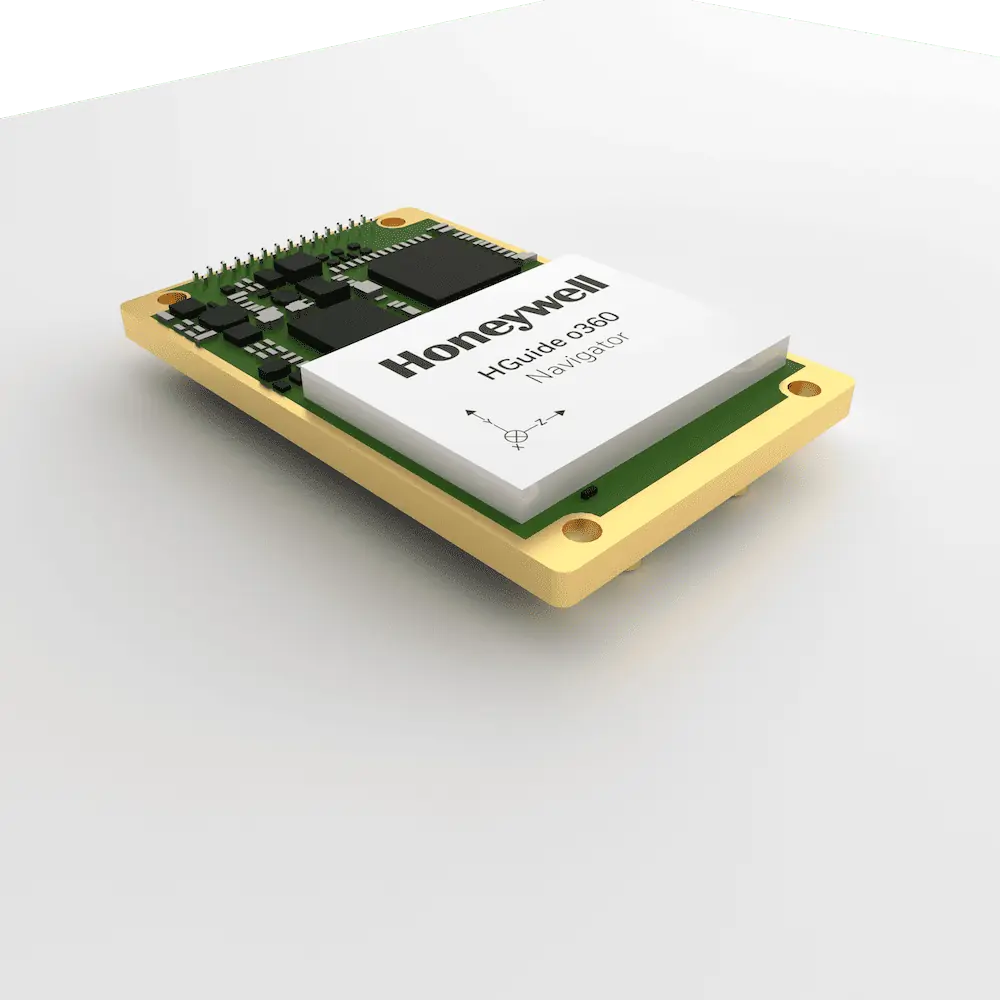
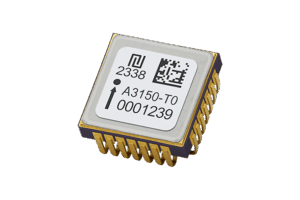
HGuide i700 MEMS IMU by Honeywell Aerospace.
Autonomous guidance is essential for a wide range of unmanned platforms, from tactical drones and long-endurance UAVs to UGVs, AUVs, and UUVs. Key technologies utilized in these solutions include inertial sensors, GNSS/GPS receivers, visual navigation algorithms, and specialized subsea navigation systems. These components are often combined through sensor fusion to enable intelligent, adaptable, and mission-resilient performance.
Inertial sensors are fundamental to many autonomous guidance systems. Inertial Measurement Units (IMUs), which contain accelerometers and gyroscopes, provide real-time measurements of velocity, acceleration, and angular rate. These data streams enable continuous position and attitude tracking through a process known as dead reckoning, allowing unmanned platforms to maintain navigation during GNSS outages or signal interference.
Advanced guidance systems utilize tactical- or navigation-grade IMUs, capable of maintaining low drift rates over extended periods. For UAVs and UGVs, inertial navigation ensures control fidelity during dynamic maneuvers or when transitioning through GPS-compromised areas, such as tunnels, canyons, or urban environments. For underwater vehicles, where external navigation signals are entirely absent, inertial systems serve as the primary method for estimating position between acoustic fixes.
Many guidance solutions combine inertial sensors with magnetometers, barometers, and GNSS receivers, enhancing accuracy and improving fault tolerance. Redundant IMU configurations and vibration-isolated mounts further ensure robust operation in the high-shock and high-vibration conditions typically found in military and aerospace deployments.
Satellite navigation plays a vital role in autonomous guidance for airborne, ground and surface unmanned systems. GNSS receivers – capable of accessing GPS, GLONASS, Galileo, and/or BeiDou constellations, provide the positional reference required for waypoint tracking, geofencing, and coordinated multi-platform operations.

VECTOR-400 Autopilot by UAV Navigation-Grupo Oesía.
Advanced GNSS capabilities, such as Real-Time Kinematic (RTK) and Precise Point Positioning (PPP), deliver centimeter-level accuracy suitable for precision takeoff, landing, and autonomous docking maneuvers. Dual-frequency and dual-antenna GNSS units enhance positioning robustness and heading estimation, enabling vehicles to maintain accurate orientation even in GPS-degraded environments.
However, GNSS is vulnerable to signal jamming, spoofing, and multipath effects, particularly in urban warfare, electronic warfare, or indoor operations. To maintain mission continuity, autonomous guidance systems often employ tightly-coupled GNSS/INS integration, allowing platforms to transition seamlessly between absolute and relative positioning without loss of control.
Visual navigation plays a crucial role in environments where GNSS signals are unavailable, intermittent, or deliberately disrupted. Using onboard cameras, LiDAR, and sometimes radar, unmanned systems can interpret their surroundings and localize their position through feature detection, optical flow analysis, and visual odometry.
Simultaneous Localization and Mapping (SLAM) algorithms enable autonomous vehicles to construct detailed 3D maps of their environment in real time while simultaneously estimating their position within it. This approach is critical for indoor navigation, subterranean missions, or navigating through dense vegetation where GNSS cannot penetrate.
Vision-based navigation also supports advanced obstacle detection, terrain classification, and dynamic rerouting. In autonomous drones, visual navigation is often used in conjunction with inertial data to support precision hovering, indoor flight, or flight in GPS-denied zones. For ground robots, stereo vision or depth-sensing cameras help interpret surface features, slope gradients, and unexpected hazards.
Edge computing accelerates the performance of these systems by processing visual data onboard, reducing reliance on communication links and enabling real-time decision-making for collision avoidance and path planning.
Underwater environments present one of the most complex challenges for autonomous guidance. In the absence of GPS/GNSS, subsea systems must rely on inertial navigation, Doppler Velocity Logs (DVL), acoustic positioning, or sonar-based terrain referencing to determine their position and navigate effectively.

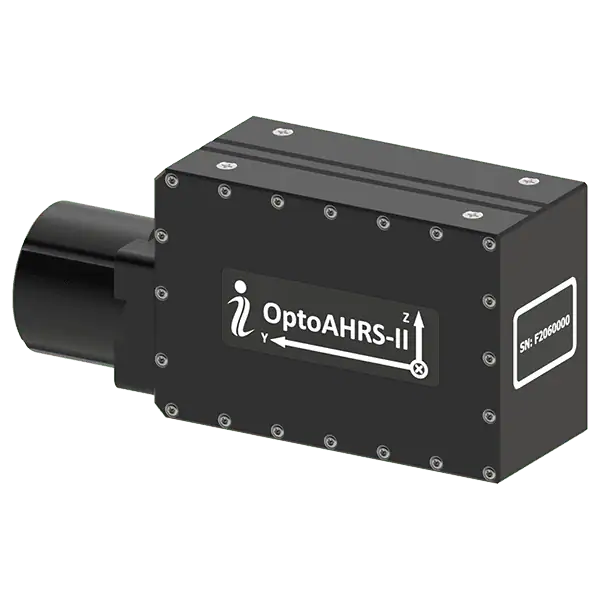
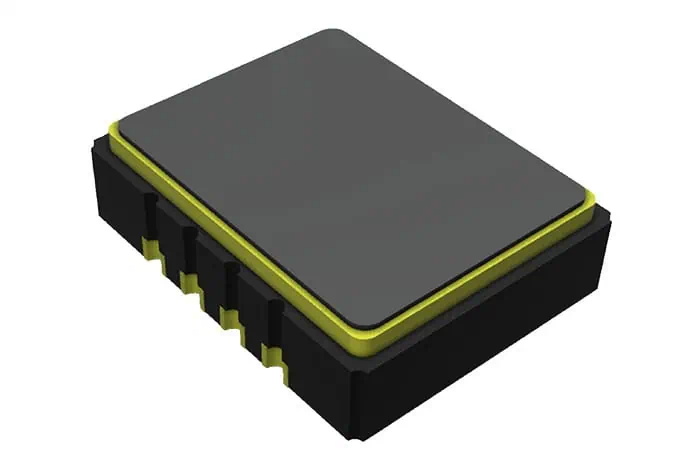
Certus Mini A MEMS AHRS Sensor by Advanced Navigation.
Inertial systems, while essential, experience cumulative drift over time. To correct for this, AUVs and UUVs use DVLs to measure velocity relative to the seafloor, and acoustic systems such as Ultra-Short Baseline (USBL), Short Baseline (SBL), and Long Baseline (LBL) arrays to receive external position fixes. These acoustic references are often integrated with onboard INS via Kalman filters to create a hybrid navigation solution with long-term accuracy and reliability.
Terrain-relative navigation (TRN) is also employed by subsea vehicles, using forward-looking sonar or multibeam echo sounders to match the seafloor profile to known bathymetric maps. This allows for precise localization in areas where acoustic transponders are not available or practical.
These subsea guidance technologies are essential for operations such as pipeline inspection, seabed mapping, under-ice exploration, and autonomous docking. They may be designed with pressure-tolerant, low-power, and fully enclosed architectures suitable for extended-duration missions in deep or turbulent waters.
Autonomous guidance platforms may rely on real-time sensor fusion frameworks that integrate data from inertial sensors, GNSS, visual sources, and other environmental inputs. These fusion engines calculate a robust and continuously updated navigation solution, ensuring that unmanned vehicles maintain control and situational awareness across complex environments.
Modern guidance systems may utilize AI-driven prediction to allow them to adapt to mission parameters, detect faults and hazards, and react to unexpected conditions with minimal latency. This autonomy is essential for a wide range of use cases, including UAV swarm coordination, long-range maritime surveillance, high-risk military operations, and industrial inspection tasks in remote areas.

 Searching Companies & Products
Searching Companies & Products

 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.