Unidades de Medição Inercial (IMU) para Drones e Sistemas Não Tripulados
As unidades de medição inercial (IMU) para drones e sistemas não tripulados fornecem os dados inerciais de alta taxa necessários para estabilizar UAVs, UGVs, USVs e ROVs, suportando a navegação precisa em ambientes dinâmicos. Combinando acelerómetros, giroscópios e magnetómetros, estes subsistemas fornecem atitude, taxa angular, vibração e estimativas derivadas essenciais para pilotos automáticos, estabilização de carga útil e operação sem GNSS.
Esta categoria apresenta fabricantes de IMUs industriais, táticas e de nível de navegação que utilizam tecnologias MEMS, Quartz e FOG para equilibrar o desempenho SWaP e de desvio em plataformas não tripuladas.
Se você projeta, constrói ou fornece Unidades de medição inercial (IMU), Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Unidades de Medição Inercial (IMU) para Drones e Sistemas Não Tripulados
Visão geral por
William Mackenzie
Atualizado:
Introdução às Unidades de Medição Inercial (IMUs) para Drones e Sistemas Não Tripulados
As Unidades de Medição Inercial (IMUs) são dispositivos sofisticados que fornecem os dados determinísticos essenciais para estabilização, orientação, mapeamento e controlo de precisão. Seja integrado a um veículo aéreo não tripulado (UAV) multirotor, um veículo subaquático autônomo (AUV) ou um veículo terrestre não tripulado (UGV) tático, um sensor IMU relata continuamente a taxa angular e a aceleração linear. Quando complementados com um magnetómetro, eles fornecem informações cruciais sobre a direção.
Esses dados permitem que os computadores de bordo inferem com precisão a atitude atual e o estado de movimento do veículo, garantindo uma operação confiável mesmo quando os sensores externos se degradam ou falham momentaneamente. À medida que a complexidade operacional das aplicações não tripuladas aumenta, a IMU continua sendo indiscutivelmente o componente mais crítico em toda a cadeia de controle do veículo.
Princípios básicos de engenharia das unidades de medição inercial
Na sua essência, uma unidade de medição inercial fornece medições essenciais, de alta frequência e específicas da plataforma, que alimentam os ciclos de controlo e navegação.
O que uma IMU mede
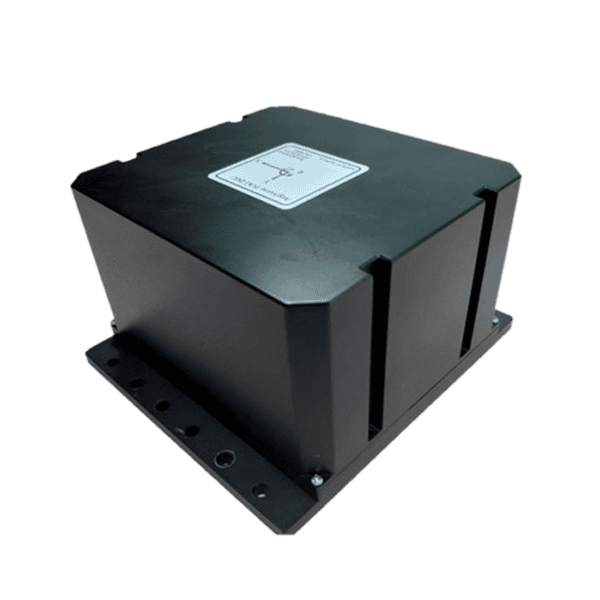
Unidade de medição inercial FI 200P da FIBERPRO
As IMUs modernas reportam continuamente um fluxo de dados altamente fiável, crucial para ciclos de controlo rápidos e tarefas de perceção de baixo nível:
Aceleração linear de três eixos: Mede forças específicas da plataforma utilizadas para inferir velocidade e movimento.
Velocidade angular de três eixos (giroscópio): Permite que o sistema de controlo mantenha uma atitude estável e amorteça perturbações rotacionais.
Campo magnético de três eixos (magnetómetro): Quando configurado como um Sistema de Referência de Atitude e Rumo (AHRS), suporta a correção de rumo a longo prazo.
Quantidades derivadas: Frequentemente incluem estimativas de atitude, intensidade de vibração e posição/velocidade quando fundidas num Sistema de Navegação Inercial (INS) completo.
Aplicações das IMUs em sistemas não tripulados
IMUs para UAVs
Para os UAVs, a unidade de medição inercial é fundamental para o controlo e a navegação. Ela fornece os dados de atitude e rotação necessários para os loops de controlo PID e a estabilização em alta velocidade, compensando o fluxo de ar turbulento e a vibração da propulsão. A baixa latência do giroscópio é imprescindível para a estabilidade da aeronave.
Para voos sem GNSS, os UAVs que operam em funções de inteligência, vigilância e reconhecimento (ISR) ou em ambientes contestados dependem de IMUs para navegação inercial sustentada, manutenção da geometria da formação e voo estacionário VTOL confiável.
Além disso, esses sensores podem estabilizar EO/IR (eletro-óptico/infravermelho) e cargas úteis de mapeamento, mantendo uma linha de visão estável e fornecendo feedback de alta velocidade para motores cardânicos.
IMUs UGV
Os UGVs dependem fortemente de dados inerciais ao navegar em túneis, florestas densas ou ambientes de campo de batalha onde o GNSS é degradado ou inexistente. A fusão de odometria com codificadores de roda e compensação robusta de deslizamento de roda são essenciais para evitar desvios durante a navegação em terrenos sem GPS.
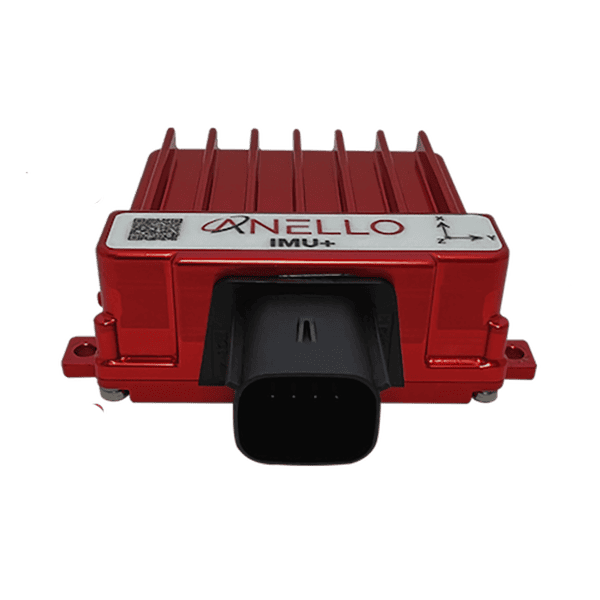
HGuide HG4930 S-Class IMU da Honeywell Aerospace
Para condução autónoma e perceção, a IMU sincroniza dados entre os pipelines de perceção LiDAR e câmera, fornecendo dados de localização de alta velocidade necessários para o planeamento responsivo do trajeto.
Fundamentalmente, os UGVs apresentam um ambiente adverso com alta vibração, extremos térmicos e EMI de rádios, exigindo caixas IMU altamente robustas e suportes com isolamento contra choques.
IMUs para veículos subaquáticos
Os veículos de superfície não tripulados (USVs) requerem IMUs para rejeição do movimento das ondas, estimativa precisa da direção e rotação/inclinação e integração perfeita com sistemas de piloto automático e radar marítimos.
Os veículos subaquáticos não tripulados (UUVs), incluindo AUVs e veículos operados remotamente (ROVs), dependem dos sensores inerciais mais precisos para a estimativa da sua posição, devido à falta de sinais GNSS. As missões dependem da navegação estimada IMU + Doppler Velocity Log (DVL) e da fusão com sistemas acústicos LBL/USBL. As missões AUV de ponta exigem frequentemente sistemas IMU baseados em FOG devido à necessidade de transições submersas longas e de baixo desvio.
Para os ROVs, estas unidades fornecem feedback em tempo real para compensar as perturbações de movimento induzidas pelo cabo e permitem um controlo preciso do manipulador e das ferramentas submarinas.
Categorias de IMU e classes de sensores
O desempenho de uma unidade de medição inercial para aplicações em drones é normalmente categorizado em classes definidas, refletindo um compromisso de engenharia entre custo, SWaP e precisão.
IMUs de grau industrial
Esses dispositivos fornecem estabilidade adequada para UAVs menores, UGVs portáteis e USVs compactos. Eles representam um excelente equilíbrio entre custo e desempenho, destacando-se em aplicações onde as restrições de peso e custo são fundamentais, como modelos comerciais de IMU para drones e cargas úteis de mapeamento de baixo custo.
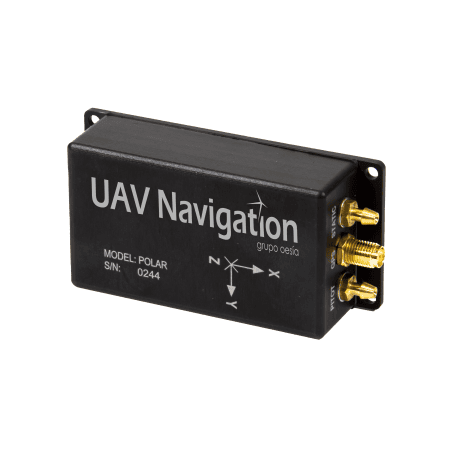
FOG IMU U121D da MostaTech
IMUs de nível tático
As IMUs de nível tático oferecem um salto significativo em desempenho em relação aos sensores de nível industrial, reduzindo drasticamente o desvio e proporcionando uma robustez ambiental muito maior. Elas normalmente apresentam uma estabilidade de polarização até duas ordens de magnitude melhor do que suas contrapartes de baixo custo.
Esta capacidade aprimorada torna-as essenciais para sistemas de piloto automático de UAV de longa duração, estabilização de carga útil EO/IR de alta precisão e plataformas marítimas não tripuladas que exigem uma estimativa de movimento mais precisa. Para alcançar essa precisão, essas IMUs geralmente utilizam tecnologia FOG ou sensores MEMS de quartzo/silício altamente refinados e com compensação térmica.
IMUs de grau de navegação
As IMUs de grau de navegação oferecem desvio extremamente baixo e precisão de longo prazo sem a necessidade de atualizações externas frequentes. Embora essas unidades sejam significativamente maiores e mais caras, elas permitem perfis de missão simplesmente impossíveis com graus inferiores. Suas principais aplicações incluem navegação AUV em missões submersas longas e complexas, UGVs de ponta operando em áreas sem GNSS e grandes UAVs de defesa que exigem navegação estimada precisa.
É importante observar, no entanto, que muitos AUVs de ponta costumam empregar INS de nível tático sofisticados (geralmente baseados em FOG) combinados com DVLs para obter desempenho de nível de navegação em um formato otimizado para SWaP, em vez de integrar uma unidade de tamanho normal.
IMUs especializadas e reforçadas
Para ambientes operacionais extremos, são necessários designs especializados. As IMUs para águas profundas incorporam caixas tolerantes a alta pressão, construção resistente à corrosão e blindagem magnética para navegação subaquática. As IMUs resistentes à radiação são projetadas para ambientes orbitais ou de alta radiação, onde os componentes MEMS convencionais se degradariam rapidamente.
Subsistemas e componentes IMU
A fiabilidade de qualquer unidade de medição inercial para drones e sistemas não tripulados provém dos componentes fortemente integrados.
Acelerómetros e giroscópios
Os acelerómetros MEMS e giroscópios dominam a maioria das aplicações não tripuladas devido ao seu equilíbrio excepcional de desempenho, baixo SWaP (tamanho, peso e potência) e eficiência de custos.
Sensores de alta tecnologia
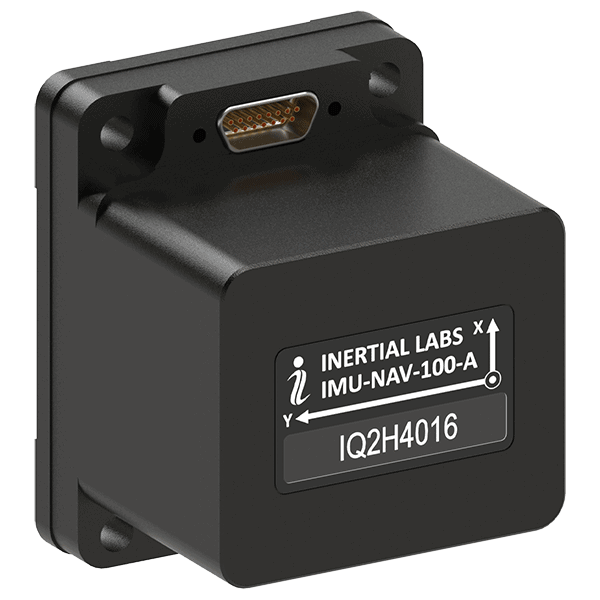
Motus Miniature MEMS IMU da Advanced Navigation
Para aplicações exigentes que requerem desvio ultrabaixo ou desempenho de navegação prolongado, dispositivos de grau superior empregam tecnologia especializada. Isso inclui MEMS de quartzo ou giroscópios de fibra ótica (FOGs), sendo estes últimos uma escolha comum para sistemas IMU e AUV táticos de UAV devido ao seu desempenho superior em um pacote com restrições de SWaP. Os giroscópios de laser em anel (RLGs) são geralmente reservados para plataformas estratégicas muito grandes.
Eletrónica de suporte
Isto inclui magnetómetros para uma referência de rumo externa, processadores incorporados para realizar filtragem e compensação de temperatura/viés e modelos de calibração sofisticados para remover efeitos de não linearidade.
Parâmetros-chave de desempenho do IMU
Ao especificar uma IMU para drones, os engenheiros devem considerar uma série de métricas técnicas que determinam o desempenho em condições operacionais:
Parâmetro
Impacto no desempenho
Estabilidade de polarização
Define a taxa de desvio mínima alcançável. Crítico para missões de longa duração.
Caminhada aleatória angular (ARW)
Quantifica o ruído e determina a precisão da atitude a curto prazo.
Largura de banda e latência
Determina a capacidade de resposta. Fundamental para estabilização em alta velocidade e loops de controlo (por exemplo, em multirotores).
Precisão do fator de escala
Determina a precisão com que o sensor mede o movimento em toda a sua faixa dinâmica.
Faixa dinâmica
A força G ou taxa de rotação máxima que o sensor pode tolerar antes da saturação.
Tolerância a choques e vibrações
Mede a robustez em relação ao ambiente operacional (por exemplo, motores UGV, turbulência da hélice).
Tendências emergentes em sensores IMU para drones
O futuro da deteção inercial está a ser impulsionado por requisitos mais elevados de autonomia e resiliência. O processamento de IA/Edge está a ser cada vez mais aproveitado no processador de borda do IMU para redução de ruído de sinal, calibração inteligente e odometria visual-inercial aprimorada para melhorar ainda mais a precisão e a resiliência sem aumentar o SWaP.
Esses requisitos crescentes de autonomia, particularmente em ambientes disputados ou totalmente autónomos, impulsionarão a demanda por unidades inerciais com resiliência ainda maior em ambientes EM disputados, taxas de dados mais altas e desempenho de carga dinâmica mais forte.
Além disso, pesquisas emergentes em IMUs quânticas e fotônicas prometem, eventualmente, oferecer precisão de nível de navegação em um perfil SWaP adequado para pequenas plataformas não tripuladas, potencialmente revolucionando a navegação de longa duração e independente de GNSS.