Trägheitsmesseinheiten (IMU) für Drohnen und unbemannte Systeme
Trägheitsmesseinheiten (IMU) für Drohnen und unbemannte Systeme liefern die hochfrequenten Trägheitsdaten, die zur Stabilisierung von UAVs, UGVs, USVs und ROVs erforderlich sind, und unterstützen so die präzise Navigation in dynamischen Umgebungen. Diese Subsysteme kombinieren Beschleunigungsmesser, Gyroskope und Magnetometer und liefern Lage-, Winkelgeschwindigkeits-, Vibrations- und abgeleitete Schätzwerte, die für Autopiloten, Nutzlaststabilisierung und den Betrieb ohne GNSS unerlässlich sind.
In dieser Kategorie werden Hersteller von industriellen, taktischen und navigationsfähigen IMUs vorgestellt, die MEMS-, Quarz- und FOG-Technologien einsetzen, um SWaP und Driftleistung auf unbemannten Plattformen auszugleichen.
Wenn Sie entwerfen, bauen oder liefern Trägheitsmesseinheiten (IMU), Erstellen Sie ein Profil, um Ihre Kompetenzen zu präsentieren und mit Besuchern in Kontakt zu treten, die einen konkreten Bedarf an Ihren Lösungen haben.
Trägheitsmesseinheiten (IMU) für Drohnen und unbemannte Systeme
Übersicht von
William Mackenzie
Aktualisiert:
Einführung in Trägheitsmesseinheiten (IMUs) für Drohnen und unbemannte Systeme
Trägheitsmesseinheiten (IMUs) sind hochentwickelte Geräte, die deterministische Daten liefern, die für Stabilisierung, Führung, Kartierung und Präzisionssteuerung unerlässlich sind. Unabhängig davon, ob sie in ein unbemanntes Multirotor-Luftfahrzeug (UAV), ein autonomes Unterwasserfahrzeug (AUV) oder ein taktisches unbemanntes Bodenfahrzeug (UGV) integriert sind, melden IMU-Sensoren kontinuierlich Winkelgeschwindigkeit und lineare Beschleunigung. In Verbindung mit einem Magnetometer liefern sie wichtige Kursangaben.
Anhand dieser Daten können Bordcomputer die aktuelle Lage und den Bewegungszustand eines Fahrzeugs präzise ableiten und so einen zuverlässigen Betrieb gewährleisten, selbst wenn externe Sensoren vorübergehend beeinträchtigt sind oder ausfallen. Angesichts der zunehmenden Komplexität unbemannter Anwendungen bleibt die IMU wohl die wichtigste Komponente in der gesamten Fahrzeugsteuerungskette.
Grundlegende technische Prinzipien von Trägheitsmesseinheiten
Im Kern liefert eine Trägheitsmesseinheit wichtige, hochfrequente, plattformspezifische Messwerte, die in die Regel- und Navigationskreisläufe eingespeist werden.
Was eine IMU misst
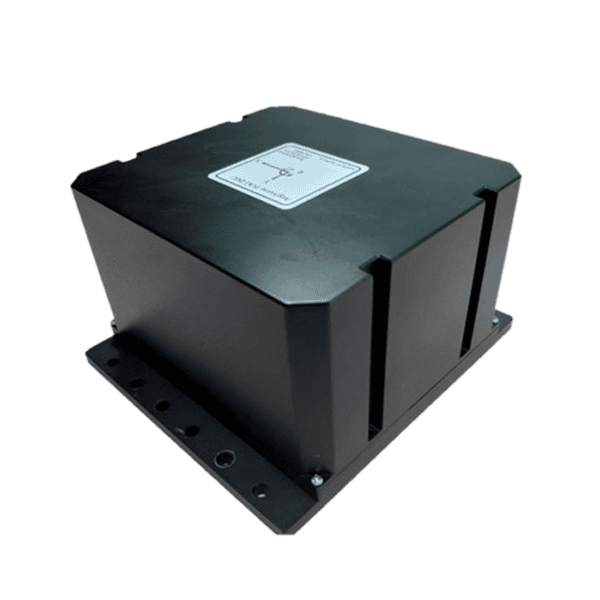
FI 200P Trägheitsmesseinheit von FIBERPRO
Moderne IMUs liefern kontinuierlich einen äußerst zuverlässigen Datenstrom, der für schnelle Regelkreise und Low-Level-Wahrnehmungsaufgaben von entscheidender Bedeutung ist:
Dreiachsige lineare Beschleunigung: Misst plattformspezifische Kräfte, die zur Ableitung von Geschwindigkeit und Bewegung verwendet werden.
Dreiachsige Winkelgeschwindigkeit (Gyroskop): Ermöglicht es dem Steuerungssystem, eine stabile Lage aufrechtzuerhalten und Drehstörungen zu dämpfen.
Dreiachsiges Magnetfeld (Magnetometer): Bei Konfiguration als Attitude and Heading Reference System (AHRS) unterstützt dies die langfristige Kurskorrektur.
Abgeleitete Größen: Umfassen häufig Lage-, Vibrationsintensitäts- und Positions-/Geschwindigkeitsschätzungen, wenn sie in ein vollständiges Trägheitsnavigationssystem (INS) integriert sind.
Anwendungen von IMUs in unbemannten Systemen
UAV-IMUs
Bei UAVs spielt die Trägheitsmesseinheit eine zentrale Rolle für die Steuerung und Navigation. Sie liefert die für PID-Regelkreise und Hochgeschwindigkeitsstabilisierung erforderlichen Lage- und Rotationsdaten und gleicht turbulente Luftströmungen und Antriebsvibrationen aus. Eine geringe Gyroskop-Latenz ist für die Stabilität des Flugzeugs unerlässlich.
Bei Flügen ohne GNSS-Empfang, bei denen UAVs in den Bereichen Aufklärung, Überwachung und Aufklärung (ISR) oder in umkämpften Umgebungen eingesetzt werden, sind IMUs für eine nachhaltige Trägheitsnavigation, die Aufrechterhaltung der Formationsgeometrie und einen zuverlässigen VTOL-Schwebeflug unerlässlich.
Darüber hinaus können diese Sensoren EO/IR- (elektrooptische/infrarote) und Kartierungsnutzlasten stabilisieren, eine stabile Sichtlinie aufrechterhalten und eine schnelle Rückmeldung für Kardanmotoren liefern.
UGV-IMUs
UGVs sind bei der Navigation in Tunneln, dichten Wäldern oder Kampfgebieten, in denen GNSS beeinträchtigt ist oder nicht verfügbar ist, stark auf Trägheitsdaten angewiesen. Die Odometriefusion mit Radgebern und eine robuste Radschlupfkompensation sind unerlässlich, um Drift während der Navigation in GPS-gestörten Gebieten zu verhindern.
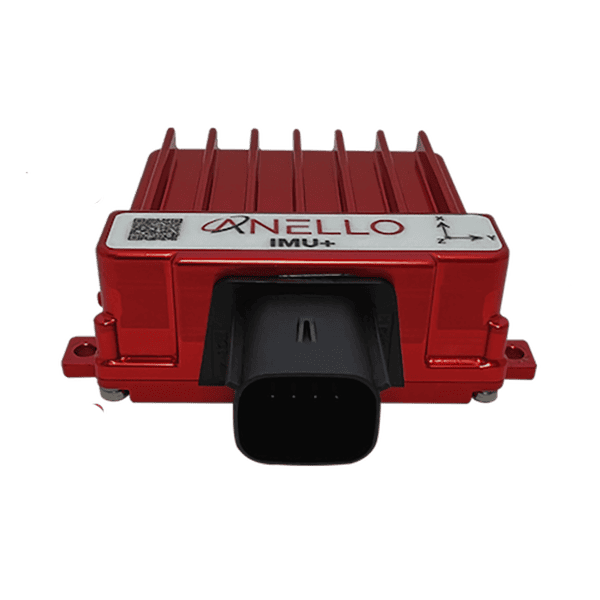
HGuide HG4930 S-Class IMU von Honeywell Aerospace
Für autonomes Fahren und Wahrnehmung synchronisiert die IMU Daten über LiDAR- und Kamera-Wahrnehmungs-Pipelines und liefert so die für eine reaktionsschnelle Routenplanung erforderlichen Hochgeschwindigkeits-Lokalisierungsdaten.
Entscheidend ist, dass UGVs einer rauen Umgebung mit starken Vibrationen, extremen Temperaturen und elektromagnetischen Störungen durch Funkgeräte ausgesetzt sind, was hochgradig robuste IMU-Gehäuse und stoßisolierende Halterungen erfordert.
IMUs für Unterwasserfahrzeuge
Unbemannte Oberflächenfahrzeuge (USVs) benötigen IMUs für die Unterdrückung von Wellenbewegungen, die genaue Kurs- und Roll-/Neigungsabschätzung sowie die nahtlose Integration mit maritimen Autopilot- und Radarsystemen.
Unbemannte Unterwasserfahrzeuge (UUVs), darunter AUVs und ferngesteuerte Fahrzeuge (ROVs), sind aufgrund fehlender GNSS-Signale auf äußerst genaue Trägheitssensoren für ihre Positionsbestimmung angewiesen. Ihre Missionen basieren auf der Koppelnavigation von IMU + Doppler-Geschwindigkeitslog (DVL) und der Fusion mit akustischen LBL/USBL-Systemen. High-End-AUV-Missionen erfordern aufgrund der Notwendigkeit von langen Unterwasserfahrten mit geringer Drift häufig FOG-basierte IMU-Systeme.
Bei ROVs liefern diese Geräte Echtzeit-Feedback, um durch das Kabel verursachte Bewegungsstörungen auszugleichen und eine präzise Steuerung von Unterwassermanipulatoren und -werkzeugen zu ermöglichen.
IMU-Kategorien und Sensorqualitäten
Die Leistung einer inertialen Messeinheit für Drohnenanwendungen wird in der Regel in definierte Qualitäten eingeteilt, die einen technischen Kompromiss zwischen Kosten, SWaP und Genauigkeit widerspiegeln.
IMUs in Industriequalität
Diese Geräte bieten ausreichende Stabilität für kleinere UAVs, tragbare UGVs und kompakte USVs. Sie bieten ein ausgezeichnetes Verhältnis zwischen Kosten und Leistung und eignen sich hervorragend für Anwendungen, bei denen Gewichts- und Kostenbeschränkungen eine wichtige Rolle spielen, wie z. B. kommerzielle Drohnen-IMU-Modelle und kostengünstige Kartierungsnutzlasten.
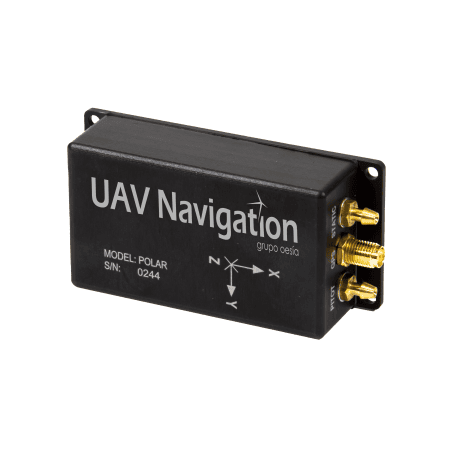
FOG IMU U121D von MostaTech
Taktische IMUs
Taktische IMUs bieten einen erheblichen Leistungssprung gegenüber Sensoren in Industriequalität, da sie die Drift drastisch reduzieren und eine viel höhere Umweltrobustheit bieten. Sie zeichnen sich in der Regel durch eine um bis zu zwei Größenordnungen bessere Bias-Stabilität aus als ihre kostengünstigeren Pendants.
Diese verbesserte Leistungsfähigkeit macht sie unverzichtbar für langlebige UAV-Autopilotsysteme, hochpräzise EO/IR-Nutzlaststabilisierung und maritime unbemannte Plattformen, die eine genauere Bewegungsschätzung erfordern. Um diese Präzision zu erreichen, nutzen diese IMUs häufig FOG-Technologie oder hochentwickelte, thermisch kompensierte Quarz-/Silizium-MEMS-Sensoren.
IMUs in Navigationsqualität
IMUs in Navigationsqualität bieten eine extrem geringe Drift und langfristige Genauigkeit, ohne dass häufige externe Aktualisierungen erforderlich sind. Diese Geräte sind zwar deutlich größer und kostspieliger, ermöglichen jedoch Missionsprofile, die mit Geräten geringerer Qualität einfach nicht möglich sind. Zu ihren Hauptanwendungsbereichen gehören die Navigation von AUVs bei langen, komplexen Unterwassermissionen, High-End-UGVs, die in Gebieten ohne GNSS-Empfang eingesetzt werden, und große Verteidigungs-UAVs, die eine präzise Koppelnavigation erfordern.
Es ist jedoch wichtig zu beachten, dass viele High-End-AUVs häufig hochentwickelte taktische INS (oft FOG-basiert) in Verbindung mit DVLs verwenden, um eine navigationsfähige Leistung in einem SWaP-optimierten Format zu erzielen, anstatt ein Gerät in voller Größe zu integrieren.
Spezialisierte und robuste IMUs
Für extreme Einsatzbedingungen sind spezielle Konstruktionen erforderlich. Tiefsee-IMUs verfügen über hochdruckbeständige Gehäuse, eine korrosionsbeständige Konstruktion und eine magnetische Abschirmung für die Unterwassernavigation. Strahlungsgehärtete IMUs sind für den Einsatz in der Umlaufbahn oder in Umgebungen mit hoher Strahlenbelastung konzipiert, in denen herkömmliche MEMS-Komponenten schnell verschleißen würden.
IMU-Subsysteme und -Komponenten
Die Zuverlässigkeit jeder Trägheitsmesseinheit für Drohnen und unbemannte Systeme beruht auf den eng integrierten Komponenten.
Beschleunigungsmesser und Gyroskope
MEMS-Beschleunigungsmesser und Gyroskope dominieren die meisten unbemannten Anwendungen aufgrund ihrer außergewöhnlichen Leistungsbalance, ihres geringen SWaP (Größe, Gewicht und Leistung) und ihrer Kosteneffizienz.
High-End-Sensoren
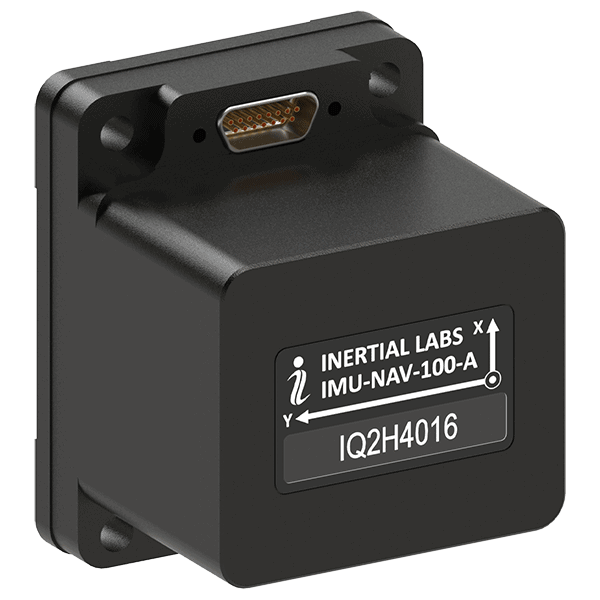
Motus Miniatur-MEMS-IMU von Advanced Navigation
Für anspruchsvolle Anwendungen, die eine extrem geringe Drift oder eine erweiterte Navigationsleistung erfordern, kommen in höherwertigen Geräten spezielle Technologien zum Einsatz. Dazu gehören Quarz-MEMS oder Glasfasergyroskope (FOGs), wobei letztere aufgrund ihrer überlegenen Leistung in einem SWaP-beschränkten Gehäuse eine gängige Wahl für taktische UAV-IMU- und AUV-Systeme sind. Ringlasergyroskope (RLGs) sind in der Regel sehr großen, strategischen Plattformen vorbehalten.
Unterstützende Elektronik
Dazu gehören Magnetometer für eine externe Kursreferenz, eingebettete Prozessoren zur Durchführung von Filterung und Temperatur-/Bias-Kompensation sowie ausgefeilte Kalibrierungsmodelle zur Beseitigung von Nichtlinearitätseffekten.
Wichtige IMU-Leistungsparameter
Bei der Spezifizierung einer Drohnen-IMU müssen Ingenieure eine Reihe von technischen Kennzahlen berücksichtigen, die die Leistung unter Betriebsbedingungen bestimmen:
Parameter
Auswirkung auf die Leistung
Bias-Stabilität
Definiert die minimal erreichbare Driftrate. Entscheidend für Langzeitmissionen.
Angular Random Walk (ARW)
Quantifiziert das Rauschen und bestimmt die kurzfristige Lagepräzision.
Bandbreite und Latenz
Bestimmt die Reaktionsfähigkeit. Entscheidend für Hochgeschwindigkeitsstabilisierung und Regelkreise (z. B. in Multirotoren).
Genauigkeit des Skalierungsfaktors
Bestimmt, wie genau der Sensor Bewegungen über seinen Dynamikbereich misst.
Dynamikbereich
Die maximale G-Kraft oder Drehzahl, die der Sensor vor der Sättigung tolerieren kann.
Stoß- und Vibrationstoleranz
Misst die Robustheit gegenüber der Betriebsumgebung (z. B. UGV-Motoren, Propellerabströmung).
Neue Trends bei IMU-Sensoren für Drohnen
Die Zukunft der Trägheitssensorik wird von höheren Anforderungen an Autonomie und Ausfallsicherheit bestimmt. KI/Edge-Verarbeitung wird zunehmend im Edge-Prozessor der IMU für Signalentstörung, intelligente Kalibrierung und verbesserte visuelle Trägheitsodometrie eingesetzt, um die Genauigkeit und Ausfallsicherheit weiter zu verbessern, ohne SWaP zu erhöhen.
Diese steigenden Anforderungen an die Autonomie, insbesondere in umkämpften oder vollständig autonomen Umgebungen, werden die Nachfrage nach Trägheitsmessgeräten mit noch größerer Widerstandsfähigkeit in umkämpften EM-Umgebungen, höheren Datenraten und stärkerer dynamischer Belastbarkeit ankurbeln.
Darüber hinaus versprechen neue Forschungsergebnisse im Bereich der Quanten- und Photonen-IMUs, dass letztendlich eine navigationsgerechte Genauigkeit in einem SWaP-Profil erreicht wird, das für kleine unbemannte Plattformen geeignet ist, was die lang andauernde, GNSS-unabhängige Navigation revolutionieren könnte.