Jeśli projektujesz, budujesz lub dostarczasz Nawigacja i pozycjonowanie podwodne, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Pozycjonowanie podwodne dla pojazdów UUV, AUV i ROV
Nawigacja podwodna, pozycjonowanie i śledzenie pojazdów UUV (bezzałogowych pojazdów podwodnych), AUV (autonomicznych pojazdów podwodnych) i ROV (zdalnie sterowanych pojazdów) są zazwyczaj realizowane przy użyciu metod akustycznych lub opartych na ruchu, ponieważ fale radiowe i inne fale elektromagnetyczne nie rozprzestrzeniają się pod wodą na użyteczne odległości. Oznacza to, że w przeciwieństwie do pojazdów bezzałogowych w innych dziedzinach, podwodne pojazdy robotyczne nie mogą polegać na stale aktualizowanych sygnałach GNSS w celu ustalenia pozycji.
Akustyczne systemy nawigacji i pozycjonowania wykorzystują stałe węzły powierzchniowe o znanej pozycji GNSS oraz szereg podwodnych transponderów, które można akustycznie pingować w celu uzyskania informacji o ich odległości i kącie względem węzła powierzchniowego.
Ramses – wysokoprecyzyjny nadajnik-odbiornik LBL firmy iXblue
Dwie najpopularniejsze formy akustycznych systemów pozycjonowania to Long Baseline (LBL) i Ultra-Short Baseline (USBL).
Long Baseline – pozycjonowanie LBL
Systemy LBL wykorzystują sieć stałych transponderów umieszczonych na dnie morskim w okolicy obszaru działania pojazdu. Transpondery te muszą być skalibrowane w odniesieniu do węzła powierzchniowego w celu ustalenia ich pozycji, a następnie można zastosować triangulację do zlokalizowania pojazdu w sieci transponderów.
Pozycjonowanie USBL – ultra-krótka linia bazowa
Podwodny akustyczny system pozycjonowania Subsonus USBL firmy Advanced Navigation
Systemy USBL wykorzystują układ przetworników, który zazwyczaj montuje się pod statkiem powierzchniowym. Czas powrotu i przesunięcie fazowe sygnału akustycznego służą do określenia odległości i kierunku przetwornika, które z kolei są wykorzystywane do ustalenia pozycji pojazdu względem statku powierzchniowego.
Systemy USBL nie są tak dokładne jak systemy LBL, ale są bardziej elastyczne i łatwiejsze w użyciu, ponieważ nie wymagają instalacji skalibrowanej sieci podwodnych węzłów.
Dopplerowskie logi prędkości – pozycjonowanie DVL
Podwodny rejestrator prędkości dopplerowskiej Syrinx firmy Sonardyne
Zamiast zewnętrznych transponderów lub przetworników, pojazdy podwodne mogą również wykorzystywać dopplerowskie rejestratory prędkości (DVL), które są czujnikami wykorzystującymi wiele wiązek akustycznych do oszacowania prędkości względem dna morskiego. Odczyty prędkości mogą być integrowane w celu zapewnienia ciągłego oszacowania zmiany pozycji. DVL są przydatne jako dokładne źródło szacowania prędkości dla INS (inercyjnych systemów nawigacyjnych), a INS wspomagany przez DVL może być wykorzystywany jako bardzo dokładna pomoc nawigacyjna i pozycjonująca dla robotyki podwodnej.
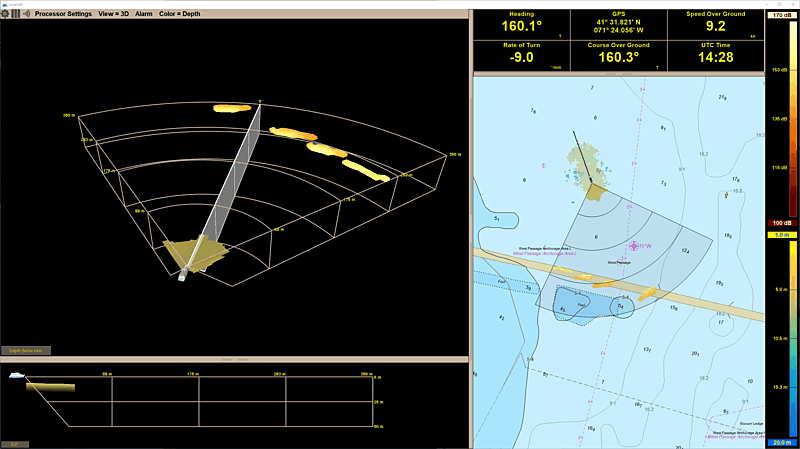
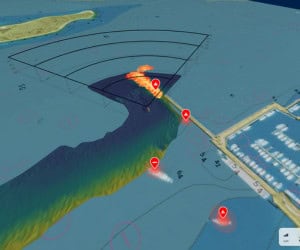
Nowa dotacja FarSounder od Rhode Island Commerce Corporation przyspieszy rozwój ram uczenia maszynowego do automatycznej klasyfikacji zagrożeń morskich.