GNSS Receivers & Modules for Unmanned Systems (Drones, UAVs & UGVs)
GNSS receivers, developed for drones and unmanned systems, provide the precise positioning and timing required for autonomous operation. These components are available in a range of configurations from suppliers and manufacturers specializing in high-performance navigation solutions for UAVs, UGVs, robotics, and marine platforms. Visitors can compare GNSS receiver manufacturers and suppliers, from compact GNSS modules for drones to survey-grade RTK GNSS receivers for mapping and forensics.
If you design, build or supply GNSS Receivers & Modules, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
GNSS Receivers & Modules for Unmanned Systems (Drones, UAVs & UGVs)
Overview by
Joe Macey
Updated:
Global Navigation Satellite System (GNSS) receivers provide critical geospatial data for navigation, timing, and control in drones, UGVs, and other autonomous systems.
These devices range from compact modules for size-constrained platforms to high-precision RTK receivers in surveying and tactical operations. Supporting standards like NMEA 0183 and NMEA 2000, modern GNSS hardware is designed for compatibility, performance, and resilience in environments where continuous signal access and accuracy are paramount.
Understanding GNSS Receivers
A GNSS receiver is a device that processes signals from global navigation satellite systems (such as GPS, GLONASS, Galileo, and BeiDou) to calculate precise position, velocity, and time. These receivers decode timing signals to calculate a device’s precise location, vital for unmanned platforms requiring accurate autonomous navigation.
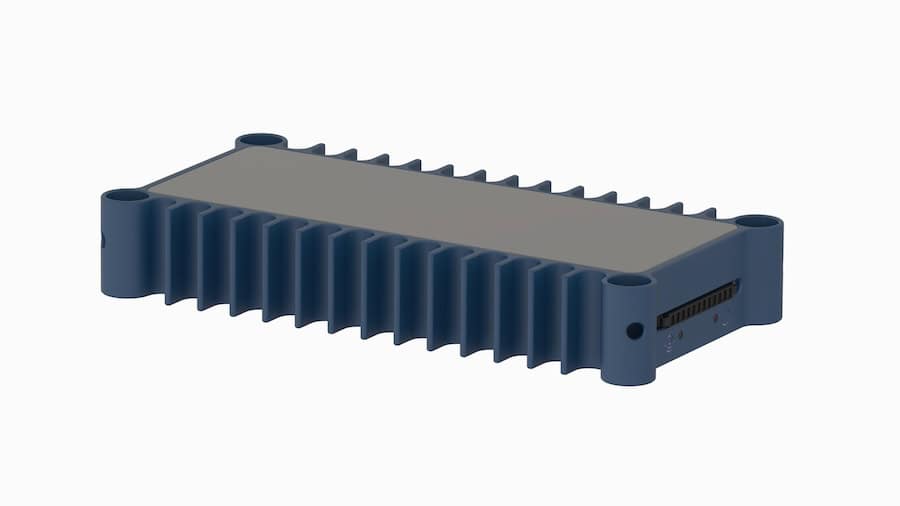
High precision GNSS receiver for drones, NF4102-T10-P, from Fiberpro.
While traditional GPS receivers focus on one constellation, modern GNSS receivers use multi-constellation and multi-frequency signals to enhance redundancy and improve accuracy under challenging conditions such as urban canyons, dense forests, or GNSS-contested environments.
GNSS Receiver Applications for Drones and Unmanned Systems
GNSS receivers are pivotal in various unmanned and autonomous platforms across air, land, sea, and subsea domains. Their integration ensures precise navigation, system coordination, and operational reliability. In particular, UAV GNSS systems and GNSS for drones are critical for enabling autonomous aerial operations with high positional accuracy and stability. As unmanned systems evolve in complexity, the demand for resilient, high-accuracy GNSS hardware continues to grow.
GNSS Receivers & Modules for Drones and UAVs
UAV GNSS receivers and drone GNSS modules provide waypoint navigation, geofencing, altitude hold, and return-to-home (RTH) functions. UAV GNSS modules are especially important in flight control systems that support stable, autonomous operation. Precision agriculture UAVs use RTK GNSS to map crop health and apply treatments with sub-meter accuracy. Tactical drones utilize military-grade GNSS with anti-jamming features for mission-critical navigation in contested airspace.
Unmanned Ground Vehicles (UGVs)
Ground robots and UGVs use GNSS for autonomous pathfinding, route optimization, and coordinated convoy operations. Survey-grade UGVs equipped with RTK receivers can perform topographic and infrastructure mapping in large or remote areas. In defense, armored UGVs integrate GNSS with IMUs to navigate in GPS-degraded environments.
Unmanned Surface Vehicles (USVs)
USVs rely on GNSS to follow preprogrammed maritime routes, perform bathymetric surveys, and monitor marine environments. High-precision GNSS receivers enable these vessels to maintain steady trajectories despite wind, waves, and current-induced drift. In naval applications, GNSS-equipped USVs can patrol harbors or act as decoys.
Unmanned Underwater Vehicles (UUVs)
While GNSS signals do not penetrate water, UUVs use GNSS at the surface to acquire a fix before submerging. This position is then carried forward using inertial navigation. Some hybrid systems allow GNSS/INS recalibration when briefly surfaced, maintaining positional integrity over extended missions.
Robotics and Industrial Automation
Warehouse and logistics robots integrate GNSS with LIDAR and vision systems for indoor-outdoor navigation. Outdoor service robots for mining or agriculture use GNSS to maintain lane guidance, field coverage, or geofencing boundaries. Autonomous delivery robots use GPS/GNSS receivers for route tracking and arrival coordination.
Defense and Tactical Systems
In military systems, GNSS receivers provide encrypted position and timing data for secure operations. These receivers may support SAASM or M-Code for access to secure satellite signals. Applications include missile guidance, command and control (C2) synchronization, battlefield asset tracking, and personnel navigation under low-visibility or GNSS-degraded conditions.
Space and Near-Space Platforms
High-altitude balloons and small satellites (CubeSats) use GNSS receivers to maintain positional awareness and timing during scientific or communications missions. Specialized GNSS modules are optimized for high-velocity dynamics and ionospheric conditions found at the edge of space.
Public Safety and Search & Rescue (SAR)
GNSS-equipped drones and UGVs assist in SAR missions by mapping disaster areas, locating signals from personal locator beacons (PLBs), and providing situational awareness in environments inaccessible to ground teams.
Environmental Monitoring
GNSS receivers support unmanned systems monitoring climate conditions, wildlife movements, and natural resources. Drones equipped with high-accuracy GNSS collect geotagged data for environmental modeling and change detection.
Law Enforcement and Forensics
Forensic teams deploy GNSS-enabled unmanned platforms to map crime scenes or accident locations with centimeter-level accuracy, preserving evidence integrity and supporting digital reconstruction efforts.
Commercial Survey and Inspection
GNSS receivers enable autonomous aerial and terrestrial surveys of pipelines, power lines, construction sites, and transportation corridors. These receivers support high-frequency position updates and integrate with RTK correction services for precise mapping. In construction, survey-grade GNSS receivers support machine control, site layout and progress monitoring, reducing rework and improving safety.
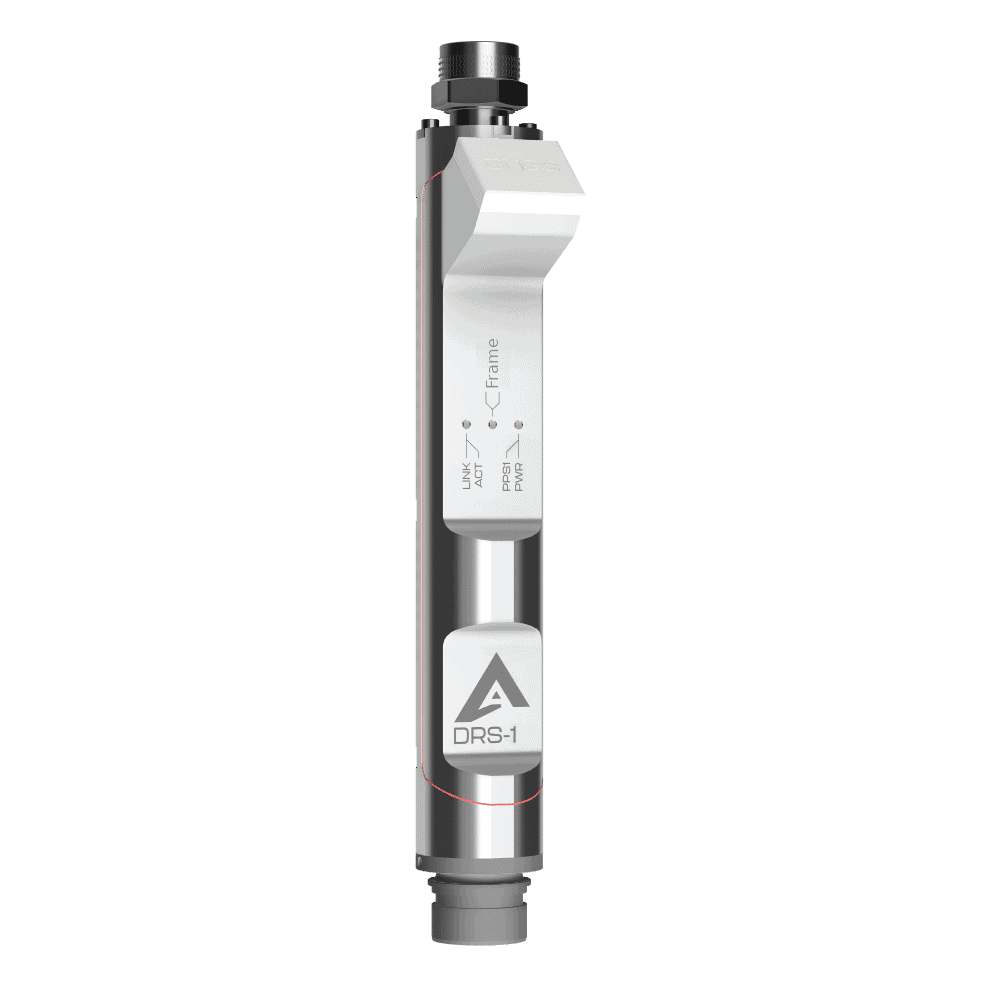
RTK GNSS receiver for drones, Oscar, by Tersus GNSS.
Types and Configurations
GNSS receivers are available in several configurations:
GNSS chipsets and GNSS receiver ICs: Integrated circuits for GNSS Chipsets and receiver ICs provide the core GNSS processing for custom hardware designs, where space and power budgets are critical
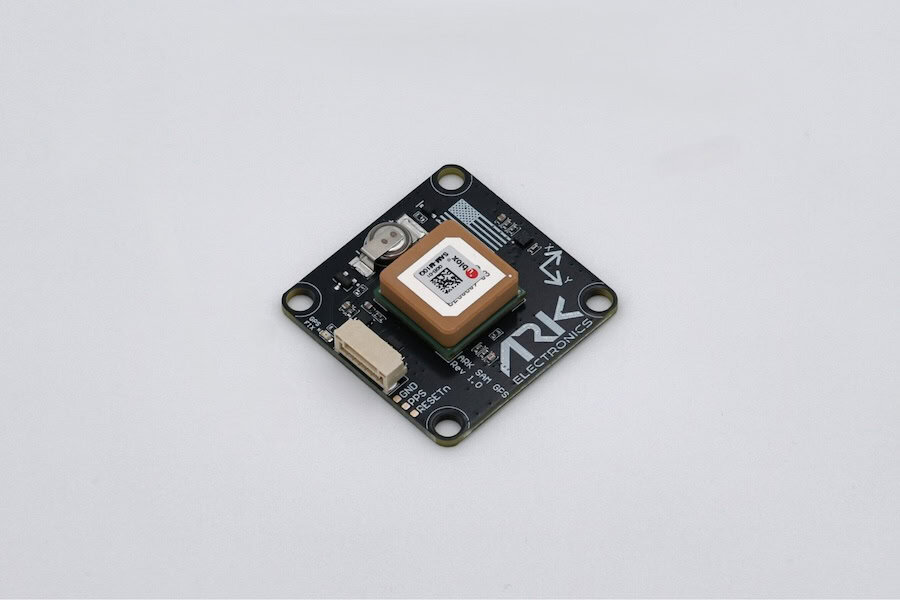
GNSS Modules: GNSS modules combine a GNSS receiver, RF front end and interfaces in a compact package, ideal for drones, UGVs and robotics
Standalone GNSS Receivers: Units with onboard processing, external antennas, and ruggedized housings for field deployment
RTK GNSS Receivers: Real-Time Kinematic receivers providing centimeter-level accuracy using differential signal correction
Dual-Antenna Receivers: Used for heading and orientation in mobile platforms
GNSS/INS Systems: Integrated inertial navigation with IMUs for continuity in GNSS-denied areas
Performance Considerations
Key performance factors for GNSS receivers include:
Accuracy: High-precision receivers offer sub-meter to centimeter-level positioning
Sensitivity: Determines the ability to acquire signals in low-SNR or obstructed environments
Update Rate: High update rates (10 Hz or more) support real-time navigation
Interfaces: Common outputs include NMEA 0183, NMEA 2000, USB, serial, and Ethernet
Time Synchronization: Some units include disciplined oscillators for precise timing
Environmental Resilience: Industrial and military-grade receivers are built for extreme temperature, vibration, and moisture conditions
Standards and Protocols
GNSS receiver technologies are governed and supported by a range of international standards:
NMEA 0183 / NMEA 2000: Communication protocols for marine and mobile GNSS integration
MIL-STD-810 / MIL-STD-461: Environmental and EMI compliance for military-grade receivers
RTCM: Differential correction messages for RTK systems
SAASM / M-Code: Secure military-grade positioning protocols for authorized users
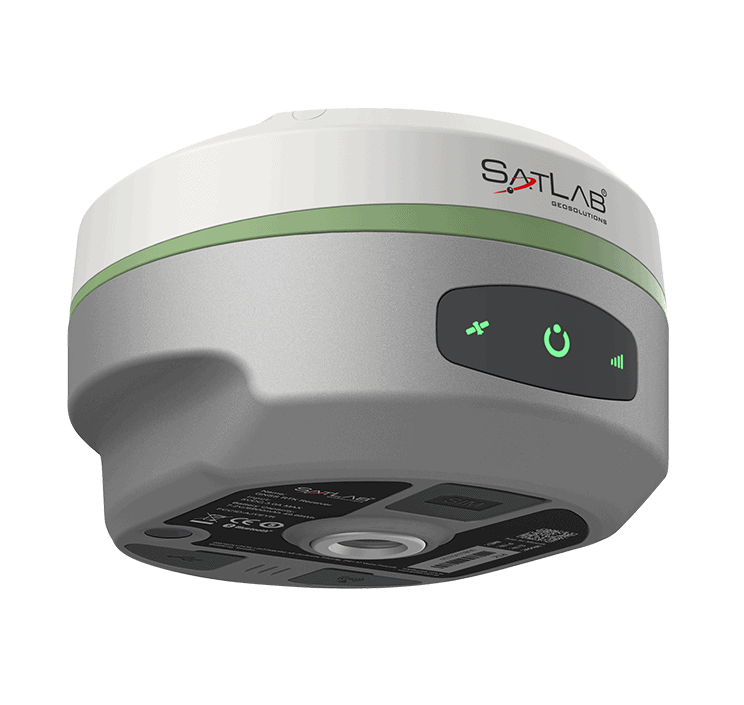
GNSS receiver device, Njord, from SatLab Geosolutions.
Comparative Technologies
When selecting GNSS receivers, users may compare:
GNSS vs GPS: GNSS includes multiple satellite systems, while GPS refers specifically to the U.S. constellation
RTK vs SBAS: RTK provides higher accuracy using base stations; SBAS offers augmentation over a wider area
Single vs Multi-Frequency: Multi-frequency receivers mitigate multipath and improve convergence times
EDGE Microwave examines a GNSS interference mitigation method that uses adaptive frequency tracking and an Adam-based adaptive notch filter architecture to improve suppression of rapidly changing narrowband jammer signals
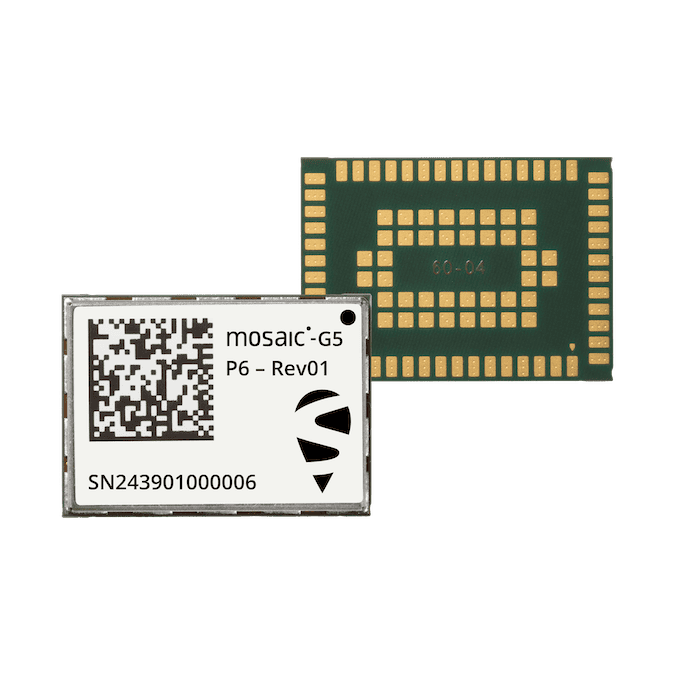
Available from GNSS.store, the mosaic-G5 P3 modules provide compact RTK GNSS positioning with support for GPS, GLONASS, Galileo, and BeiDou, combining fast satellite acquisition and low power consumption for industrial, embedded, and high-precision applications
Septentrio's comprehensive product portfolio utilizes advanced anti-jamming and anti-spoofing technology and also includes Blue UAS Framework-listed GNSS receivers
The mosaic-G5 P3H modules, available from GNSS.store, deliver high-precision dual channel RTK GNSS positioning with multi-constellation support, fast satellite acquisition, and low power consumption
Available from GNSS.store, the ZED-X20P GNSS modules provide 672-channel, all-band RTK positioning with multi-constellation support, delivering centimeter-level accuracy for unmanned, autonomous, surveying, and industrial applications
Septentrio examines how built-in anti-jamming and anti-spoofing mechanisms in GNSS receivers strengthen the resilience of integrated GNSS/INS navigation systems
Hexagon | NovAtel launches new firmware for its OEM7 GNSS receiver family, adding advanced tracking capabilities and improving PPP, RTK, and SPAN-enabled positioning in challenging environments
GNSS.store's solutions are built around cutting-edge modules from leading providers such as u-blox, Septentrio and Unicore
Feb 04, 2026
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.