Find Unmanned Ground Vehicle manufacturers and suppliers of UGVs for military, civil and commercial use, including armoured, autonomous and unmanned land vehicles and robotics
If you design, build or supply Unmanned Ground Vehicles (UGV), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
Fully autonomous utility ATV for off-road unmanned missions
Fully autonomous utility ATV for off-road unmanned missions
...us All-Terrain Vehicle (ATV) developed for unmannedground operations in complex off-road... ...scenarios. The vehicle-agnostic CoreX system also enables scalability across mixed fleets, enhancing...
...tom four-wheel unmannedgroundvehicle chassis that can be tailored to meet a wide range of... ...... create purpose-built robotic vehicles while reducing development time and integration...
Efficient conversion of heavy machinery into teleoperated UGVs
Efficient conversion of heavy machinery into teleoperated UGVs
...o teleoperated unmannedgroundvehicles. Designed as a practical retrofit solution, the technology... ...f the original vehicle. By transforming conventional equipment into teleoperated assets,...
Unmanned ground vehicles (UGVs) are robotic systems that operate on land without an onboard human operator. They are used for a wide variety of both civilian and military applications, particularly in environments that are hazardous or unpleasant to humans and for tasks that are difficult, dull or pose unacceptable risks.
Ripsaw® M5 UGV by Textron Systems
UGV platforms may be designed from scratch or based on an existing manned land vehicle such as a Land Rover. Vehicle kits are also available for converting manned vehicles into UGVs, and may provide optionally manned capabilities that allow users to select crewed or uncrewed operation.
Autonomous Ground Vehicles
UGVs may be remotely controlled via a handheld or fixed control station, or operate autonomously. Autonomous UGVs can travel between pre-defined waypoints, or roam throughout the environment to execute their mission. UGVs operating in previously uncharted or constantly changing environments may have to collect information and build up a map of their surroundings using techniques such as simultaneous localization and mapping (SLAM). Artificial intelligence and machine learning may also help them adapt to their surroundings.
UGV Locomotion
Greensea IQ’s Bayonet 150 Amphibious UGV
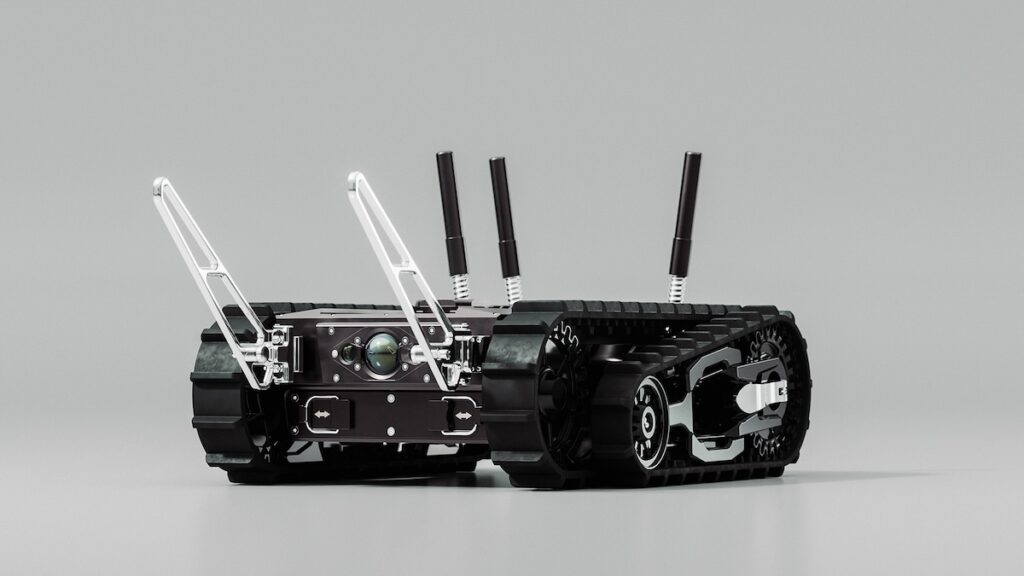
The three main UGV locomotion methods are wheels, tracks and legs. Wheels are power-efficient and allow the highest speeds on flat ground, but are not good for traversing off-road and uneven terrain, as they can get stuck or sink into the ground due to low contact surface area and thus higher pressure. Tracks are the best option for rugged terrain, but are slower, less efficient, involve more mechanical complexity and cause more vibration. Legged ground robots can cope with a wide variety of terrain, but are limited in speed and require complex control and stability hardware.
Small UGVs
Small UGVs can be powered by electric batteries. Larger ones may use a petrol or diesel engine, or a hybrid system that uses a combustion engine to drive an electric generator rather than directly connecting to the locomotion system. Hydrogen fuel cell power systems for UGVs are also under development.
Unmanned Vehicle Communication
Wireless communications are required to operate UGVs remotely, as well as to relay video footage and other sensor data. This will typically be done by RF (radio frequency) communications, satellite links, or wireless fiber optic. UGVs will often require non-line of sight (NLOS) communications due to operating in urban and cluttered environments. Mobile ad hoc network (MANET) technology is often utilised in order to help UGVs maintain links even in adverse conditions.
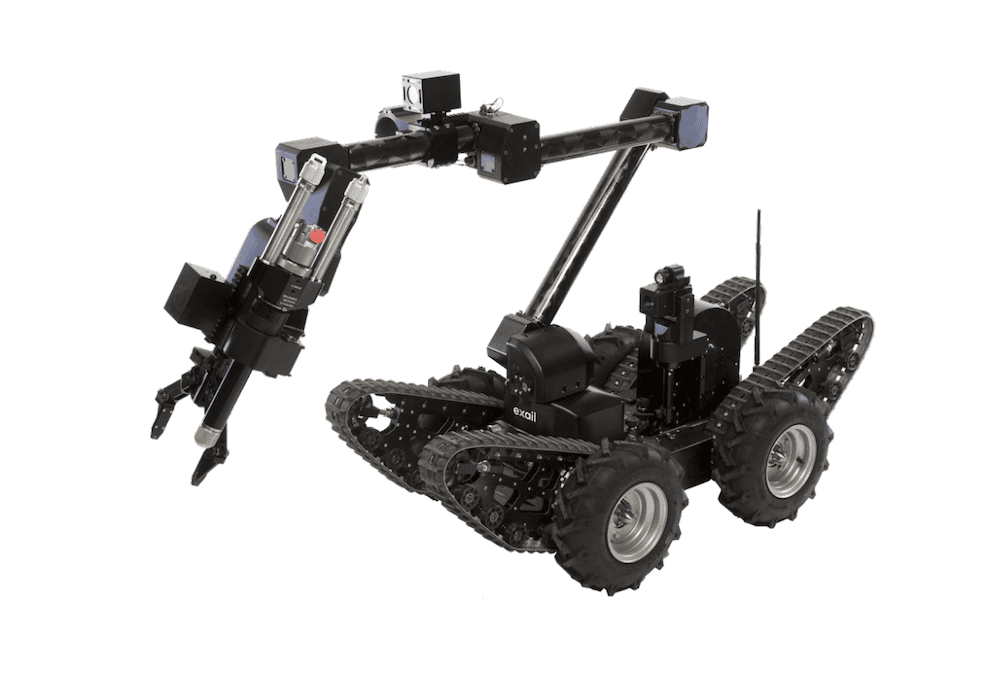
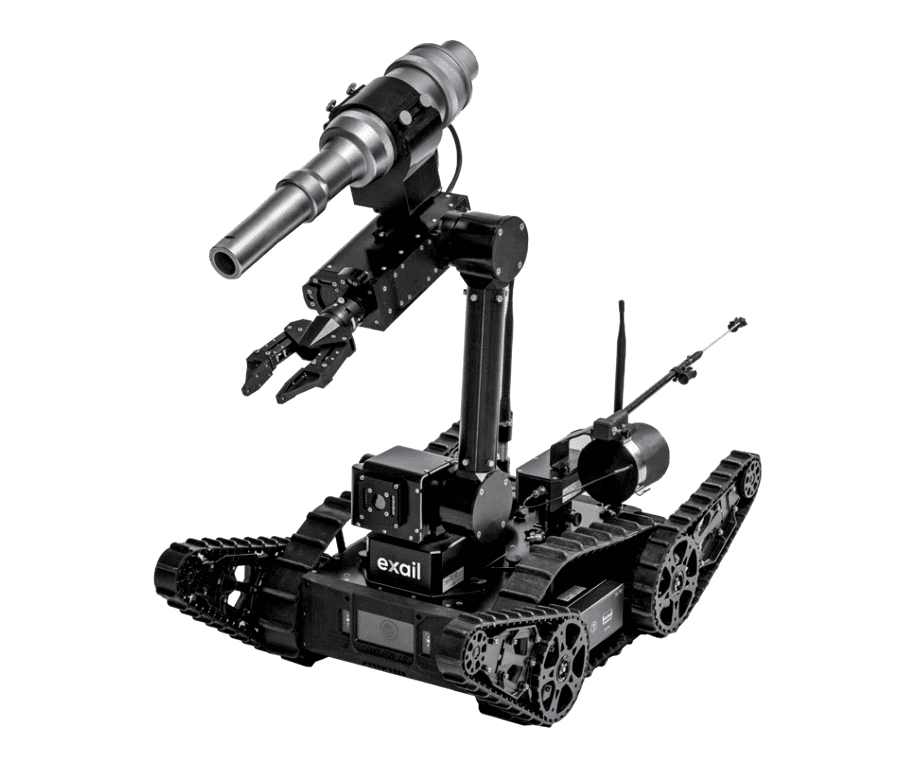
UGVs can be equipped with a variety of sensors and payloads. Due to operating in indoor and other GNSS-denied environments, UGVs may rely on LiDAR sensors, combined with inertial navigation systems and vehicle odometry, for accurate navigation. Mission-specific sensors and payloads include RGB and thermal cameras, manipulator arms, chemical and explosives sensors, and weapons systems.
Commercial UGVs
UGVs are used for a wide range of civilian applications such as urban search and rescue, firefighting, nuclear plant operations, crowd control and agricultural spraying and harvesting.
UGV Military
Military UGV uses include EOD (explosive ordnance disposal), equipment carrying, forward reconnaissance, mobile weapons platforms and manned-unmanned teaming. Many UGV platforms can be quickly reconfigured to perform multiple roles.
The United States Marine Corps has ordered four additional Bayonet 250 autonomous underwater ground vehicles from Greensea IQ to enhance its mine countermeasures and subsea threat mitigation in littoral zones
In this Q&A, GESAR INC discusses teleoperated heavy machinery, modular unmanned ground vehicle chassis design, GPS-denied navigation, and robotics development for hazardous and hard-to-access industrial environments
GESAR's solutions enable organizations to convert existing heavy machinery into remotely operated UGVs as well as to develop autonomy-ready ground vehicle platforms
Designed for dismounted forces, AeroVironment's new compact uncrewed ground vehicle integrates autonomous mapping and modular payloads to safely navigate complex terrain and mitigate explosive hazards at the rugged tactical edge
During Project Flytrap in Lithuania, U.S. soldiers evaluated ABRIS Design Group’s UNEX UGV in casualty evacuation scenarios, demonstrating the platform’s mobility, payload capacity, and low-signature operational capabilities
Textron Systems and Howe & Howe have introduced the RIPSAW M1 technology demonstrator, a modular uncrewed ground vehicle engineered to provide the U.S. Marine Corps with enhanced littoral mobility and lethality
Maris-Tech examines how edge computing enables autonomous defense platforms to process data locally, supporting real-time decision-making, navigation, and ISR operations in contested and connectivity-limited environments
Allient has published a new whitepaper exploring how motor selection impacts the performance of humanoid robotics systems, with a focus on actuator design, system behavior, and the challenges of delivering precise, high-torque motion in compact, real-world applications
May 01, 2026
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.