Showcase your capabilities
If you design, build or supply Underwater Sensors, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Underwater sensors enable unmanned maritime platforms to gather accurate environmental and navigational data in challenging subsea environments. These marine and subsea sensors support ROVs, AUVs, UUVs, gliders, and fixed monitoring systems used for seabed mapping, infrastructure inspection, defense missions, and oceanographic research. Explore a wide range of underwater sensing technologies, including pressure sensors, salinity and conductivity sensors, hydrophones, magnetometers, optical sensors, and inertial measurement units designed for reliable operation at depth.
Read the Technology Overview

Cutting-Edge Acoustic Positioning & Subsea Imagery Solutions for Unmanned & Robotic Systems

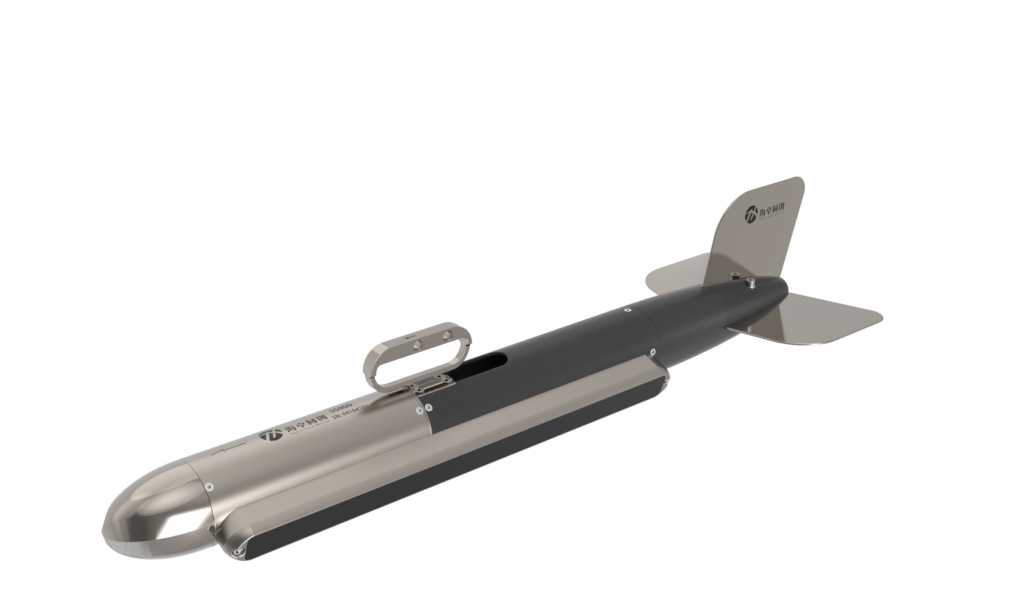
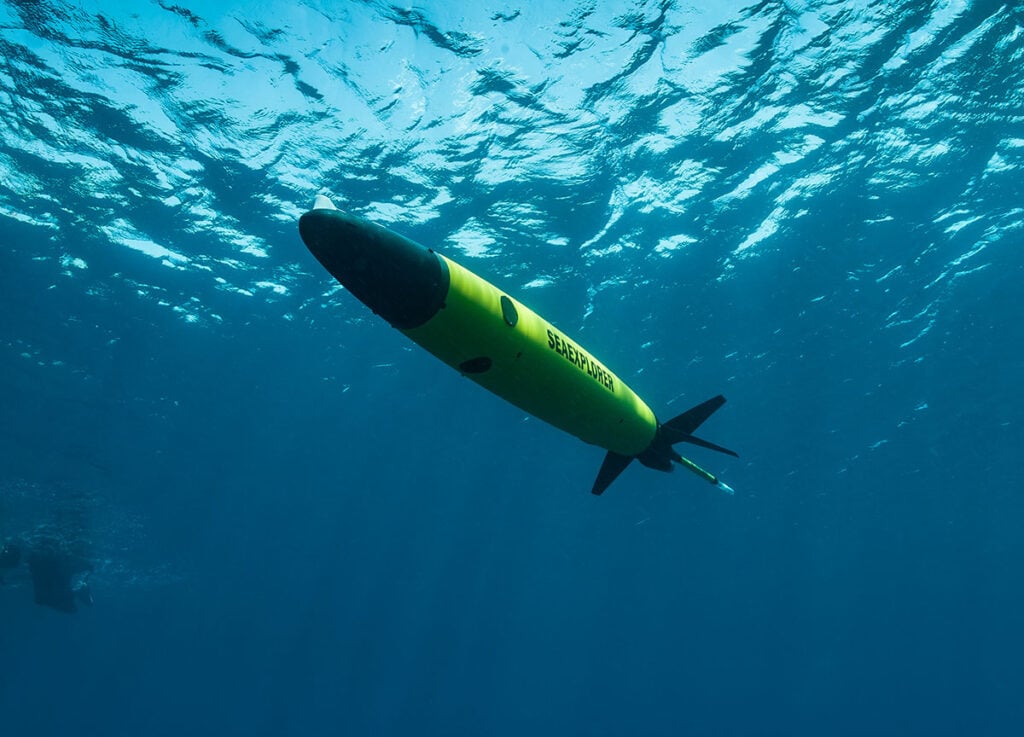
Autonomous Underwater Drone for Subsea Exploration, Survey and Inspection


High-Performance Inertial Navigation Systems (INS) for Unmanned Systems

Autonomous and Unmanned Marine Vehicles: USV, AUV, Marine ROV; Profiling Floats & Towed Systems

Inertial Navigation Sensors: MEMS IMU, Accelerometers, Gyroscopes, AHRS, GPS-INS & Point Cloud Generation

Inertial Navigation Systems, INS/GPS, AHRS, and IMU Sensors for Unmanned Systems


Advanced Underwater Imaging & Positioning Solutions for Uncrewed & Autonomous Marine Vehicles
Leading-Edge Solutions & Services for Defense, Ocean & Marine Energies Applications
Innovative High-Resolution Subsea Imaging and Power Technologies for Commercial, Scientific & Military Underwater Survey Missions

GNSS Positioning Systems, 3D SLAM & Mobile Mapping, Unmanned Surface Vehicles

AUV Payloads & ROV Skids: Underwater Laser Scanners & 4K Stills Cameras for Subsea Inspections & Surveys
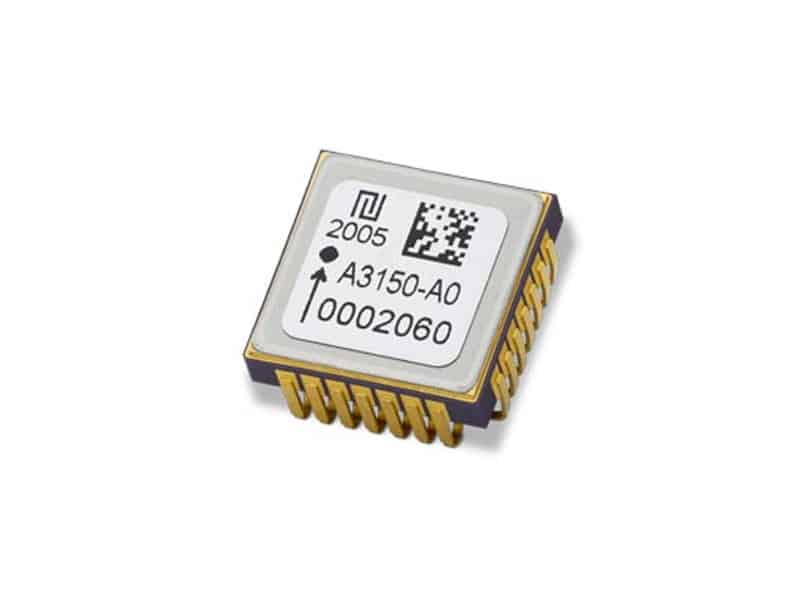
High-Precision Digital MEMS Accelerometers Gyros for Demanding Unmanned Systems Operating In Harsh Environments

High Performance FOG and Quartz MEMS Inertial Sensors - Gyros, IRU, IMU, INS


MEMS Inertial Sensors: IMUs, GPS-Aided INS, Gyroscopes, Accelerometers, AHRS

Tracking, Navigation, Positioning and Communication Sensors for AUV, ROV, USV

Hydrographic & Oceanographic Equipment for Unmanned & Autonomous Surface Vessels & Underwater Vehicles
Integrated Systems & Payloads for Unmanned Surface & Underwater Platforms Operating in Complex Maritime Environments

Conductivity, Temperature & Depth (CTD) Measurement Technologies for Unmanned Oceanography & Marine Survey

Hydrographic Survey Equipment: Multibeam Echo Sounders, Side Scan Sonars, Sound Velocity Sensors & Profilers

GNSS Positioning & Navigation Systems, Mobile Mapping UAV LiDAR & Unmanned Surface Vehicles

MEMS Inertial Sensor Solutions, IMUs, Gyroscopes and MEMS Accelerometers for Unmanned Vehicles

Weather Monitoring Stations, Marine Transducers, Side-Scan Sonar & Underwater Altimeters
If you design, build or supply Underwater Sensors, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Underwater sensors are key components of unmanned maritime systems, delivering mission-critical data in real time for a range of requirements. Integrated into autonomous underwater vehicles (AUVs), remotely operated vehicles (ROVs), gliders, towed systems, and seabed installations, these devices support environmental monitoring, navigation, defense, and infrastructure inspection tasks across a range of depths and ocean conditions.
Underwater sensors may be engineered to perform in the harshest aquatic environments, enabling both civilian and military platforms to expand situational awareness and operational capabilities below the waterline. They may need to withstand water ingress and salt corrosion, and sensors operating at the most extreme depths may require rugged titanium pressure-resistant housings.

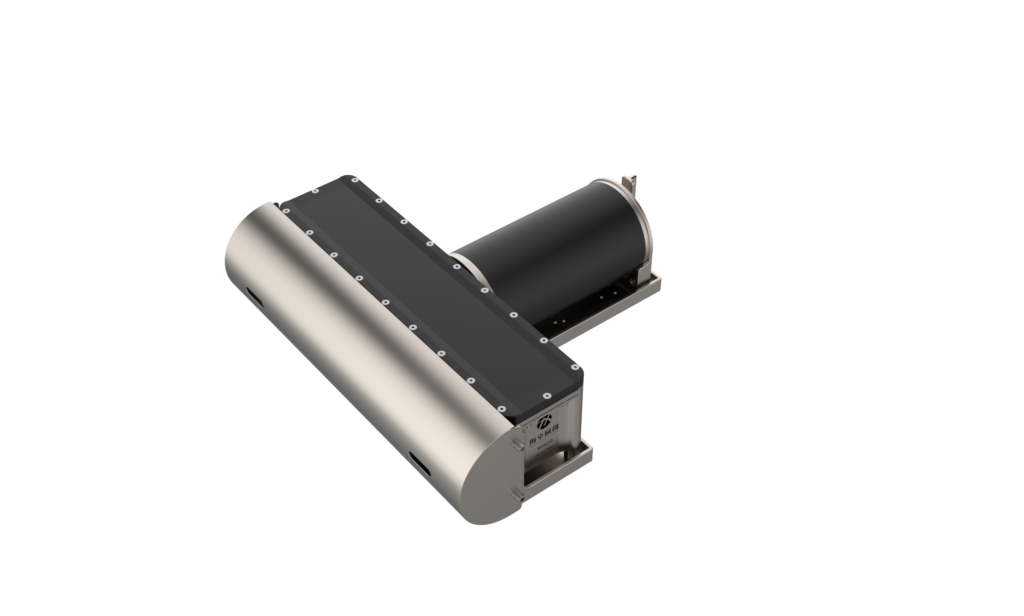
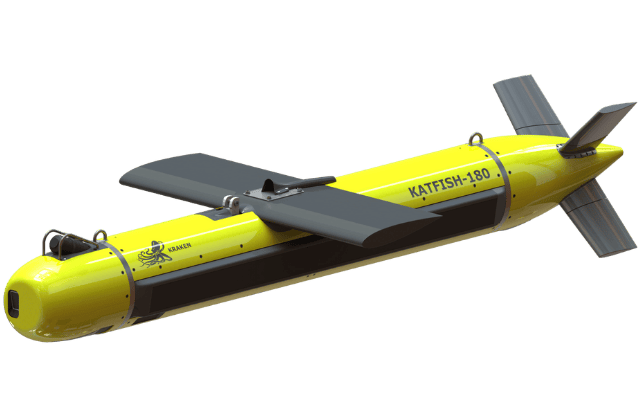
Kraken MP-SAS by Kraken Robotics
Ocean profiling relies heavily on accurate salinity, temperature, and pressure measurements to assess phenomena such as stratification, thermoclines, and water mass behavior. Salinity sensors are often combined with temperature and pressure sensors in compact, multiparameter units to build detailed environmental profiles. These are crucial for both scientific research and for enhancing the navigational models of autonomous vehicles, particularly those performing extended-duration missions.

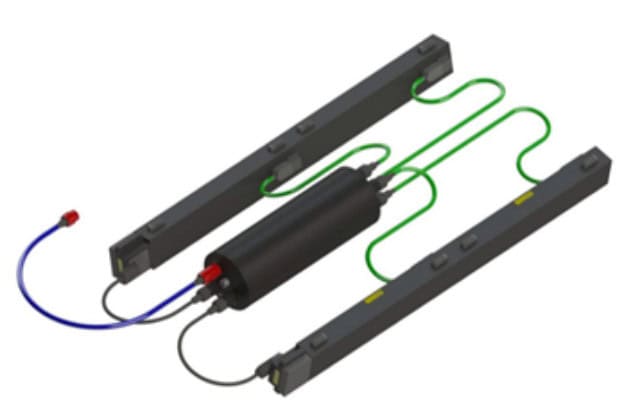
Workhorse Proteus ADCP by Teledyne Marine
Conductivity sensors are directly linked to salinity measurements and play a vital role in monitoring changes in ocean chemistry. Similarly, pH sensors allow for real-time monitoring of ocean acidification and chemical contamination. These tools are essential for pollution detection and assessing long-term ecological changes, and are often used in fixed sensor arrays for continuous monitoring in coastal zones or sensitive marine habitats.
Turbidity sensors measure suspended particle concentrations in the water column, which are indicative of erosion, runoff, or disturbance from dredging or seabed mining. Flow sensors monitor current velocity and direction, feeding hydrodynamic models and helping AUVs optimize propulsion strategies. These sensors are critical in estuarine research, environmental impact assessments, and sediment transport studies.
Hydrophones capture underwater acoustic signals, enabling applications such as marine life monitoring, undersea communication, and vessel detection. When arranged in arrays, they provide spatial localization capabilities, making them indispensable for submarine tracking, passive sonar operations, and surveillance missions. Defense operations rely heavily on hydrophone arrays for detecting and classifying underwater threats in real time.
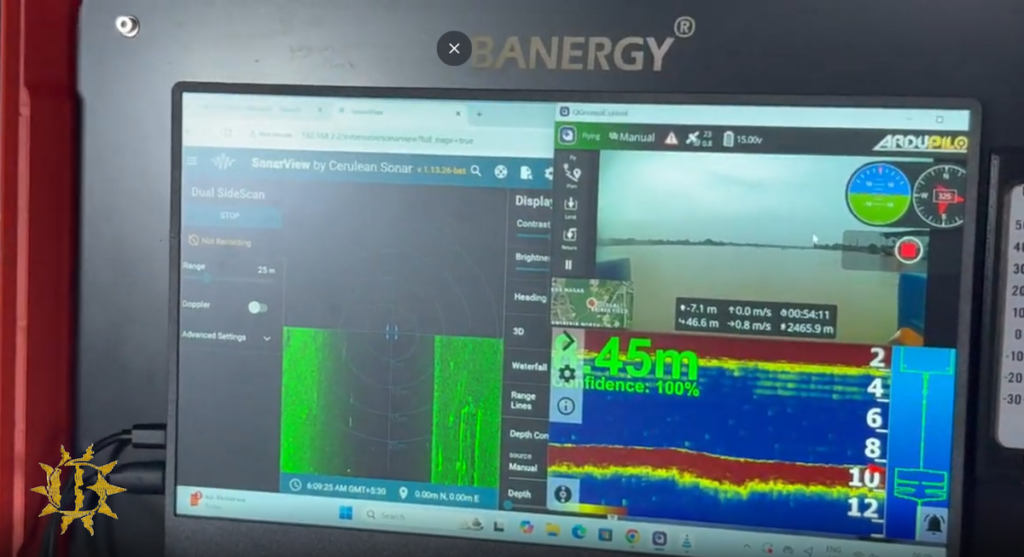
Transducers convert electrical signals into sound waves and vice versa, enabling active sonar systems to map surroundings and detect objects. Side-scan sonar, multibeam sonar, and forward-looking sonar technologies employ transducers to create detailed images of the seabed, aiding in navigation, mine clearance, and wreck detection. These systems are also integral to obstacle detection and avoidance in complex or confined underwater spaces.
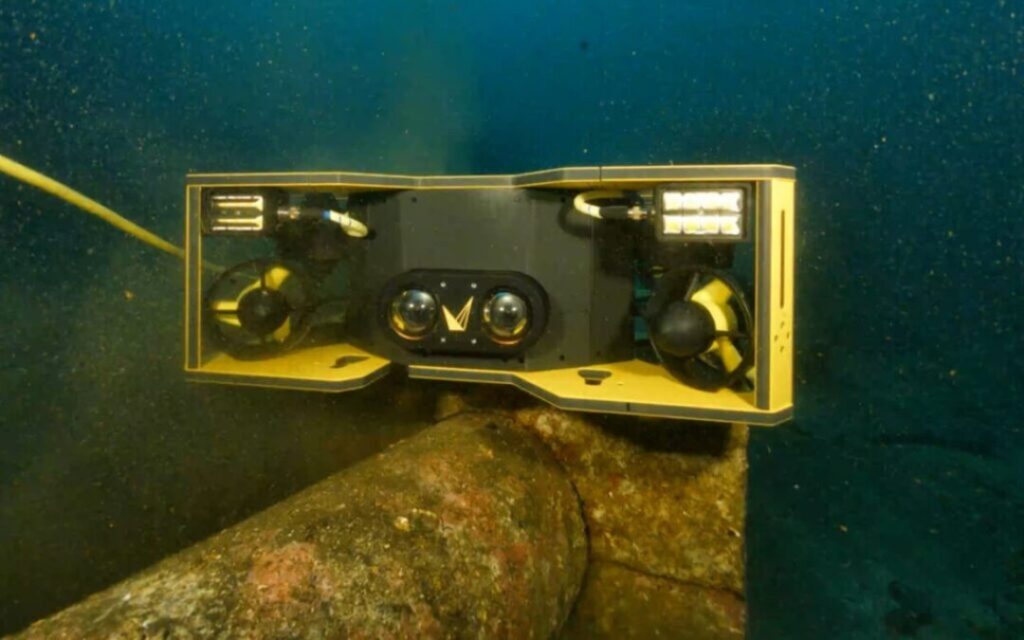
High-resolution optical sensors, including underwater cameras and laser-based imaging systems, support visual inspection and situational awareness. These are deployed for infrastructure inspection, pipeline surveys, and biological assessments such as coral reef monitoring, as well as for UUV navigation. Optical sensors are often complemented by artificial lighting arrays and image processing algorithms to enhance clarity in low-light or high-turbidity conditions.

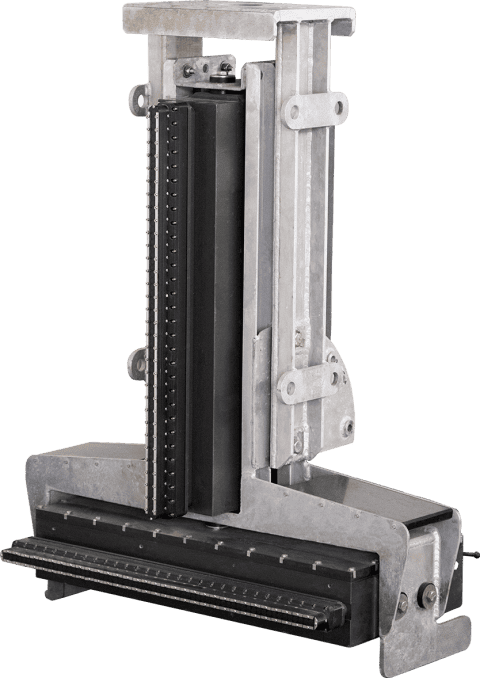
Airmar’s 200m Mini Altimeter Kit Smart™ Sensor for AUVs, ROVs
Biosensors detect biological or biochemical markers, such as microbial activity, toxins, or specific proteins, and are used in applications ranging from pollution detection to harmful algal bloom monitoring. These sensors provide targeted insights into the health of aquatic ecosystems and are being increasingly adopted in marine biology research and environmental compliance operations.
Used to detect magnetic anomalies, magnetometers identify ferrous materials and geological features on or beneath the seabed. These instruments are crucial in underwater mine detection and UXO (unexploded ordnance) operations, archaeology, and locating lost metallic infrastructure. In defense applications, magnetometers support both covert reconnaissance and explosive ordnance disposal operations.
IMUs provide orientation, velocity, and acceleration data by combining accelerometers and gyroscopes. In subsea environments where GPS signals are unavailable, IMUs serve as the backbone of dead-reckoning navigation systems for AUVs. Their high precision ensures accurate path tracking over extended missions, especially in deep-sea or cluttered environments.
Depth sensors are typically pressure-based and provide critical information for maintaining consistent operating depth and for executing terrain-following algorithms. These are essential for bathymetric surveys, subsea mapping, and operating safely at proximity to the seafloor or subsea structures.

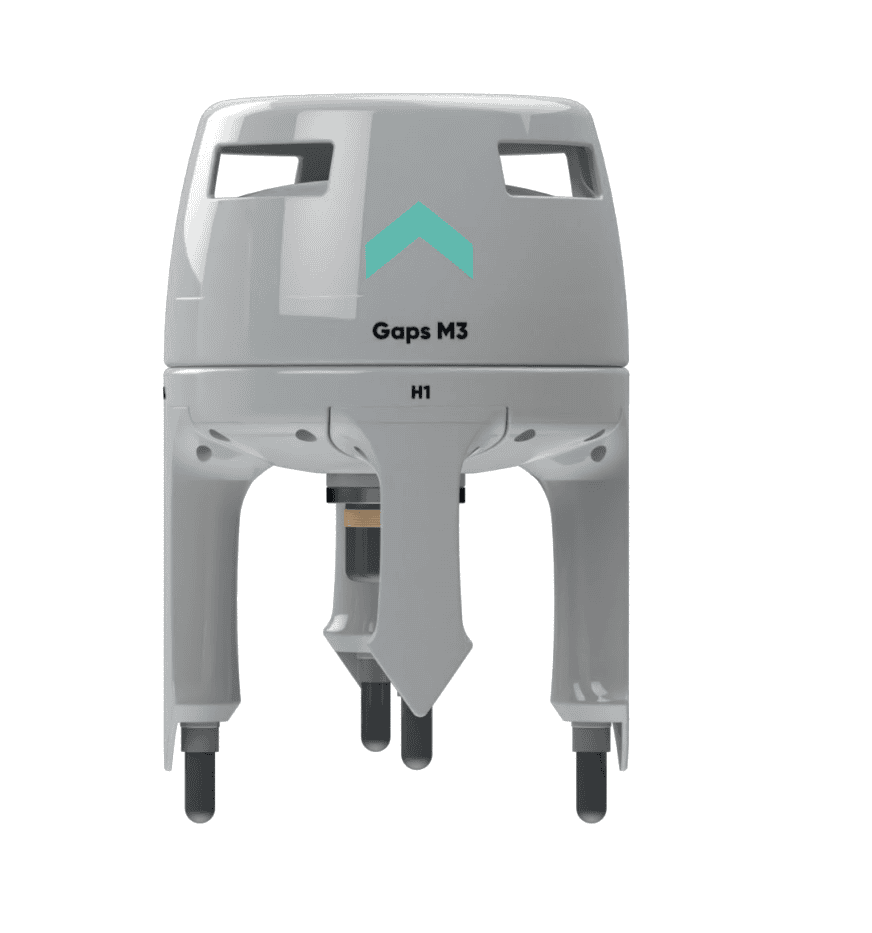
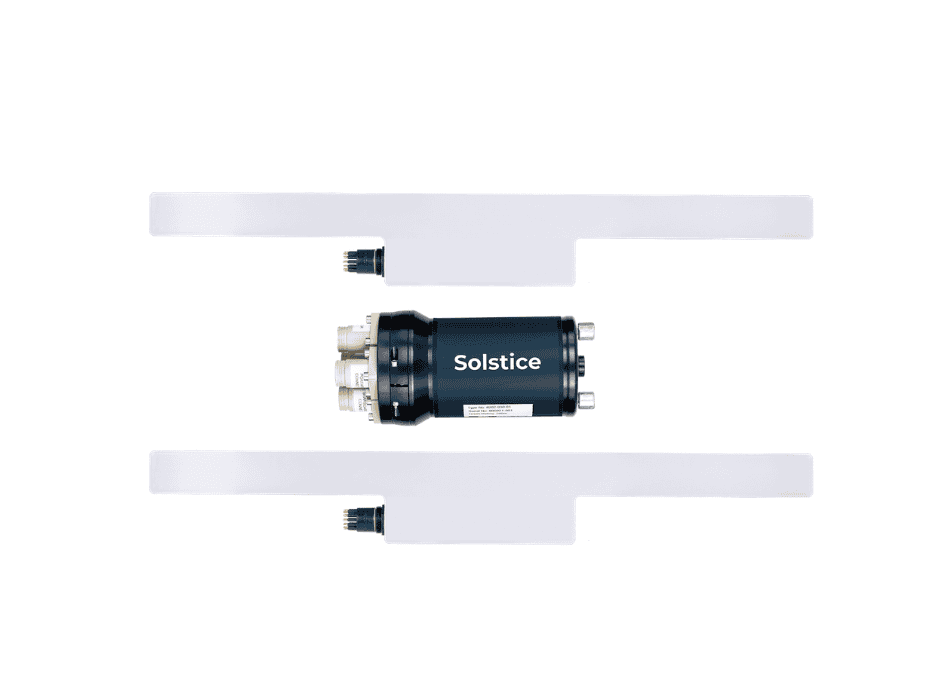
Subsonus Underwater Acoustic Positioning System by Advanced Navigation
Underwater sensors are often used on UUV platforms to deliver real-time obstacle detection and avoidance capabilities. By combining acoustic sonar, optical imaging, and inertial data, unmanned vehicles can autonomously navigate complex terrain, avoid collisions, and maintain safe operating parameters even in constrained environments such as underwater pipelines or harbor areas.
Sensors configured for high-resolution bathymetry and subsea asset inspection enable detailed mapping of ocean floors and verification of underwater installations. These systems are vital for subsea construction, oil and gas maintenance, and cable route planning, with the added benefit of reducing diver risk and operational costs.
For ecological applications, underwater sensors support reef health analysis, species behavior monitoring, and water quality assessment. Deployments may include long-duration sensors for continuous monitoring or short-term AUV missions with adaptive sensor payloads.
The ongoing miniaturization and modularization of underwater sensor technologies enable integration into a growing variety of unmanned marine platforms. As multi-sensor fusion becomes standard, operators, survey companies, research institutes and a variety of other users can benefit from rich, layered datasets that inform more intelligent decision-making.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.