Showcase your capabilities
If you design, build or supply Underwater Acoustics, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Find suppliers and manufacturers of Underwater Acoustic Technology including Hydrophones and Acoustic Transducers
Read the Technology Overview
Inertial Navigation & Positioning Technology for Unmanned, Autonomous Systems

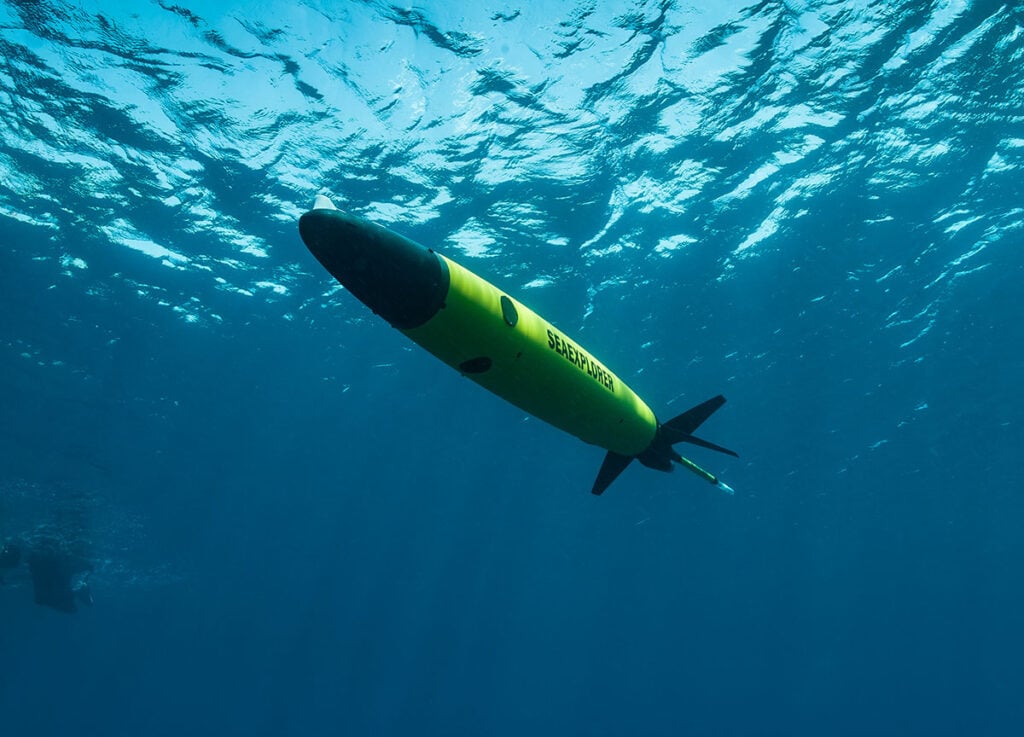
Autonomous and Unmanned Marine Vehicles: USV, AUV, Marine ROV; Profiling Floats & Towed Systems

Advanced Underwater Imaging & Positioning Solutions for Uncrewed & Autonomous Marine Vehicles
Leading-Edge Solutions & Services for Defense, Ocean & Marine Energies Applications
Innovative High-Resolution Subsea Imaging and Power Technologies for Commercial, Scientific & Military Underwater Survey Missions

GNSS Positioning Systems, 3D SLAM & Mobile Mapping, Unmanned Surface Vehicles

Tracking, Navigation, Positioning and Communication Sensors for AUV, ROV, USV
Integrated Systems & Payloads for Unmanned Surface & Underwater Platforms Operating in Complex Maritime Environments

Hydrographic Survey Equipment: Multibeam Echo Sounders, Side Scan Sonars, Sound Velocity Sensors & Profilers

GNSS Positioning & Navigation Systems, Mobile Mapping UAV LiDAR & Unmanned Surface Vehicles
Weather Monitoring Stations, Marine Transducers, Side-Scan Sonar & Underwater Altimeters
If you design, build or supply Underwater Acoustics, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Underwater acoustics are used by UUVs (unmanned underwater vehicles), AUVs (autonomous underwater vehicles) and ROVs (remotely operated vehicles) for a variety of applications. RF and other electromagnetic waves do not propagate well in water, and so sound waves, which can be received and measured over useful distances underwater, are the most viable alternative.
Underwater communications are typically carried out using acoustic transducers, which convert electrical energy into sound waves, and hydrophones, which are the underwater equivalent of microphones. Such communications are used not only from vehicle to vehicle but also to collect data from networks of acoustic underwater sensors that can monitor a variety of parameters.
Hydrophones can also be used by UUVs to gather information about the underwater environment. This can include monitoring for noise pollution, detection of marine mammals, and searching for the signatures of specific vessels such as naval ships or submarines.

SIERA Sonar System – Portable Underwater Acoustic Calibration System by RTSYS

Advanced Navigation’s Subsonus Underwater Acoustic Positioning System
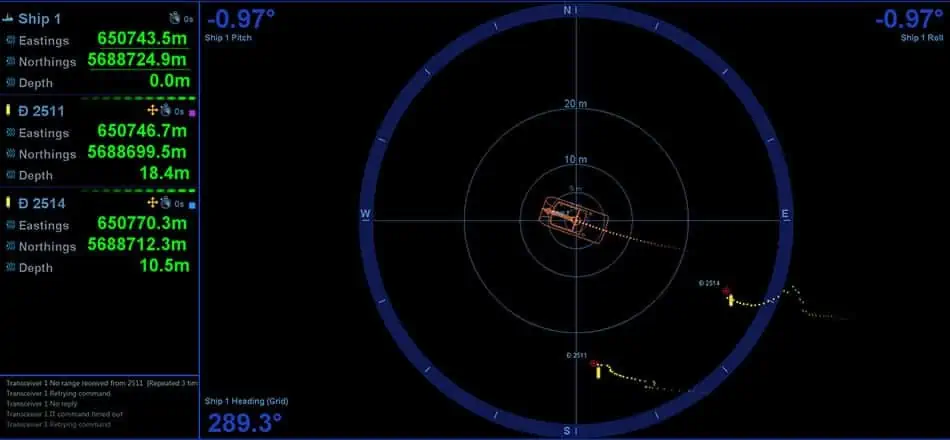
Underwater acoustics can also be used for subsea vehicle tracking and navigation. Acoustic underwater positioning systems use distance and direction measurements to achieve this, and are generally organised into three types – long-baseline (LBL), short-baseline (SBL) and ultra-short-baseline (USBL). LBL acoustic positioning systems utilise networks of seafloor acoustic transponders, whereas SBL and USBL make use of transducers that are usually mounted on surface vessels.
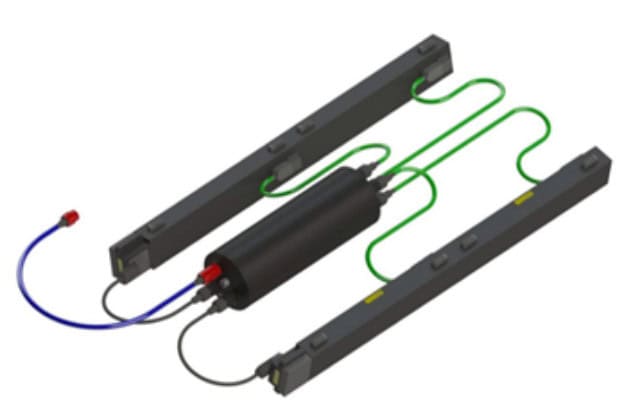
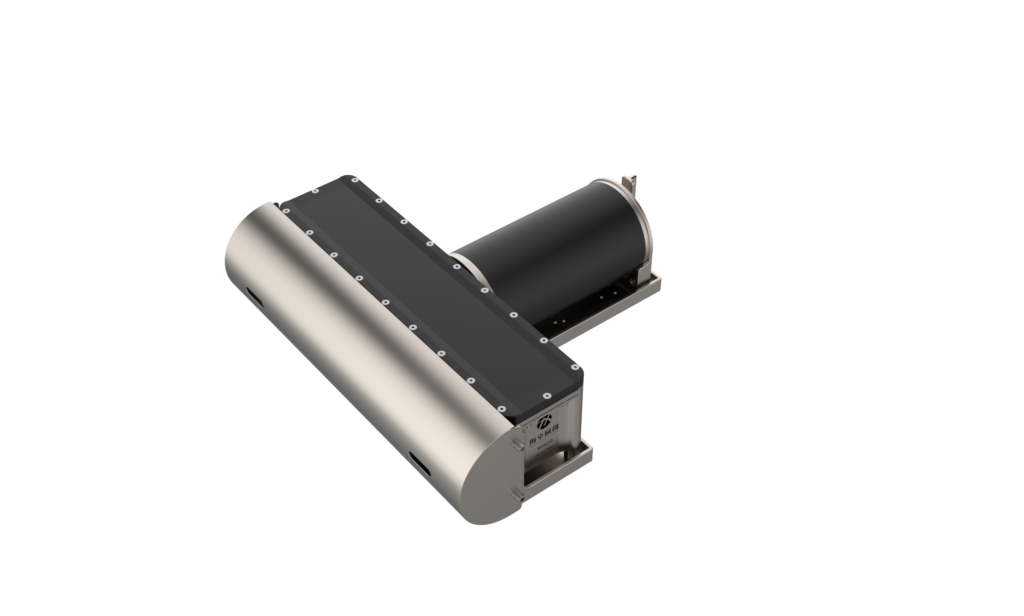
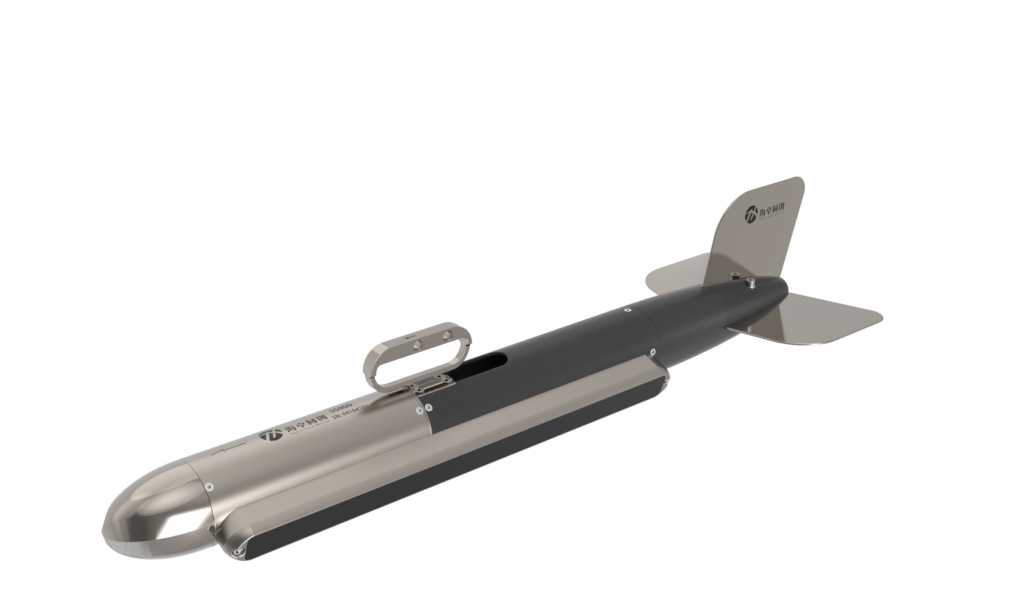
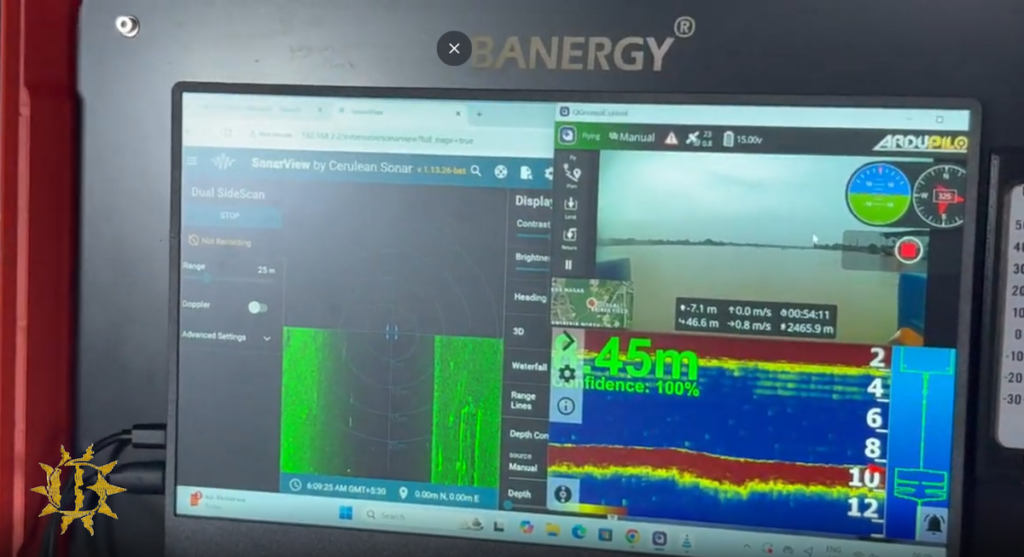
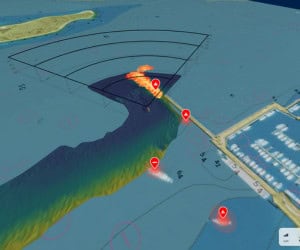
Sonar is used by UUVs and AUVs, as well as USVs (uncrewed surface vessels) for underwater mapping and bathymetry. Side scan sonar is typically deployed as a towfish that can be attached to a UUV, and covers large areas in great detail by measuring the intensity of the return signal. Multibeam echosounders emit multiple acoustic waves in a fan shape below the vessel, and use the measured time of reflection to make distance and depth measurements. Forward Looking Sonar (FLS) is often used in collision avoidance, underwater inspection, and long-range navigation. Read more about sonar and echosounders for unmanned underwater vehicles.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.