If you design, build or supply Synthetic Aperture Sonar, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
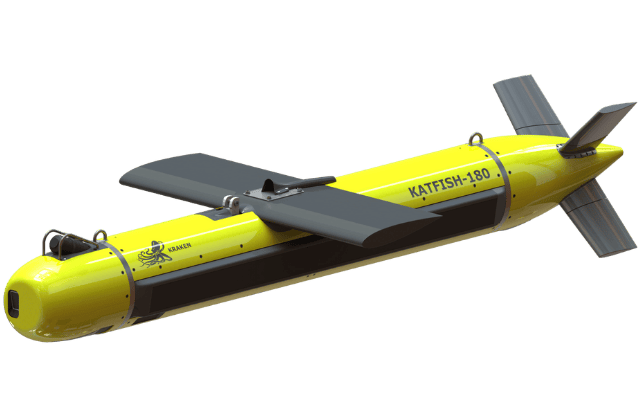
...8-M is a towed SyntheticApertureSonar(SAS) developed for advanced underwater detection, mine... ...vironment, the sonar supports real-time data transfer, processing, target detection, and...
Synthetic aperture sonar (SAS) is a form of sonar technology that is designed to make up for the shortcomings of traditional side scan sonar, which provides decreasing image quality and resolution as the distance from the sensor’s transducer array increases. Increasing the quality of the image at a particular distance for a side scan sonar would require a larger array, which will eventually be limited by the size and capability of the host vehicle.
Operating Principles
Synthetic aperture sonar shares similar operating principles with synthetic aperture radar, using the forward motion of the platform it is mounted on to create an artificially larger aperture. Unlike traditional sonar scanning, which sends out one ping at a time and waits for the return echo before sending out another one, SAS sends out multiple pulses, making multiple measurements at each location, and combines the returned signals. The overlap results in highly detailed images with resolution that can exceed that of side scan sonar by an order of magnitude.
SAS for Unmanned Systems
SAS systems may be mounted on UUVs (unmanned underwater vehicles) such as ROVs (remotely operated vehicles) and AUVs (autonomous underwater vehicles), as well as USVs (uncrewed surface vessels) and towfish.
As the increased number of pings draws more power and the data processing is computationally intense, synthetic aperture sonars may be better suited to larger AUVs and other vehicles with less restrictive SWaP (size, weight and power) budgets. Errors in the measurements of SAS systems can be reduced by fusing with data from an INS (inertial navigation system), so vehicles with high-accuracy inertial sensors on board are also well-suited to the technology.
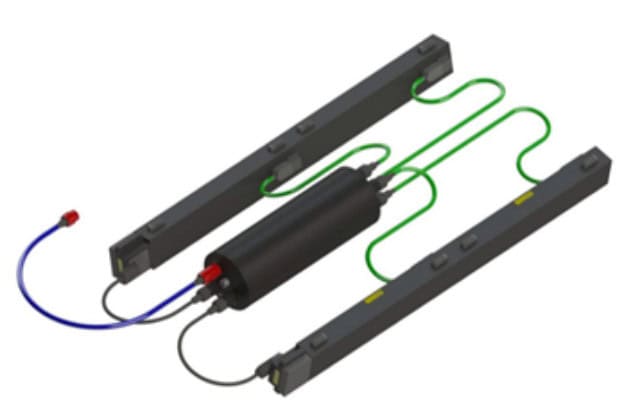
SAMS Series Synthetic Aperture Sonars by Exail
Applications
Synthetic aperture sonar is used for a range of military and civilian applications, including bathymetry, mapping, mine counter-measures (MCM), underwater archaeology, and environmental research.
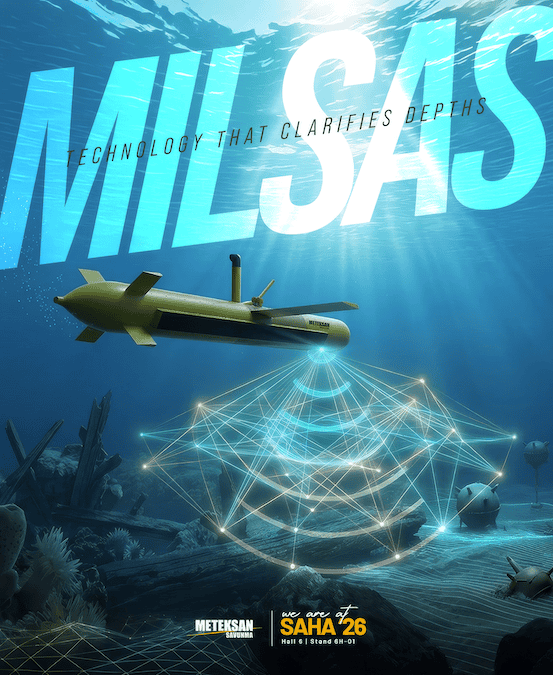
Meteksan Defense discusses the development of its MİLSAS synthetic aperture sonar system and its role in supporting high-resolution underwater imaging, seabed mapping, and underwater target detection
Kraken Robotics’ acquisition of Covelya Group expands its subsea technology portfolio, adding navigation, positioning, and communications capabilities for autonomous underwater and maritime platforms worldwide
Kraken Robotics and TKMS ATLAS UK have successfully demonstrated the KATFISH USV-LARS on the UK Royal Navy's ARCIMS USV, advancing autonomous survey capabilities for maritime security and mine countermeasure operations
Kraken Robotics secures $12 million in global orders for its SAS and SeaPower systems, expanding deployments across defense, commercial, and survey AUVs
Kraken Robotics appoints BlueZone Group as an authorized reseller, expanding regional access to its advanced SAS and KATFISH systems and strengthening in-country support capabilities across Australia and New Zealand
Kraken Robotics’ synthetic aperture sonar technology saw record adoption at the 2025 REPMUS exercise in Portugal, demonstrating growing interoperability across international naval teams and underwater platforms
Following its acquisition by Kraken earlier this year, 3D at Depth's name and brand have been fully integrated to offer a broader range of subsea technology solutions to clients
Oct 07, 2025
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.