Znajdź producentów podwodnych robotów inspekcyjnych do inspekcji rurociągów, obiektów podmorskich i morskich, w tym bezzałogowych pojazdów inspekcyjnych i robotów gąsienicowych do zastosowań komercyjnych i środowiskowych.
Innowacyjne technologie obrazowania podwodnego w wysokiej rozdzielczości oraz technologie zasilania do komercyjnych, naukowych i wojskowych misji badawczych pod wodą
Jeśli projektujesz, budujesz lub dostarczasz Robotyka do inspekcji podwodnych, Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Bezzałogowe statki i robotyka do inspekcji podmorskich
Podwodną inspekcję konstrukcji, statków i innych obiektów można przeprowadzać za pomocą różnych bezzałogowych platform systemowych. Takie zdalnie sterowane lub autonomiczne prace inspekcyjne mogą być szybsze i bardziej wydajne niż wysyłanie zespołu nurków lub personelu na pokład statku, a także mogą zaoszczędzić czas zespołom załogowym, umożliwiając identyfikację kluczowych obszarów wymagających dokładniejszej kontroli. Pojazdy bezzałogowe, takie jak USV (bezzałogowe statki powierzchniowe) i UUV (bezzałogowe pojazdy podwodne) mogą również uzyskać dostęp do obszarów, które są zbyt odległe, trudne lub niebezpieczne dla nurków lub załogowych statków.
Apache4 ASV firmy CHC Navigation
Inspekcja podwodna za pomocą USV
USV mogą być wykorzystywane do inspekcji części konstrukcji krytycznych znajdujących się poniżej linii wodnej, takich jak mosty, tamy, wały przeciwpowodziowe oraz rurociągi naftowe i gazowe. Statki te mogą być wyposażone w podwodne kamery wideo, a także sonary boczne lub wielowiązkowe do podwodnego obrazowania akustycznego.
Niektóre USV mogą również wykorzystywać podwodne pojazdy inspekcyjne ROV (zdalnie sterowane pojazdy) lub inne pojazdy podwodne UUV do przeprowadzania bardziej szczegółowych inspekcji.
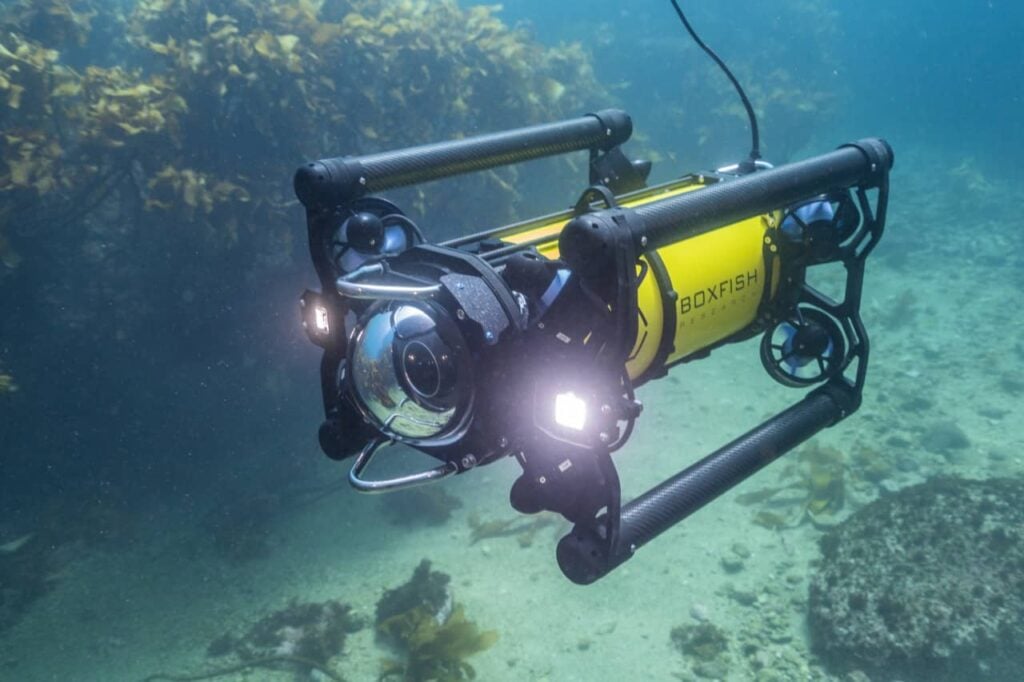
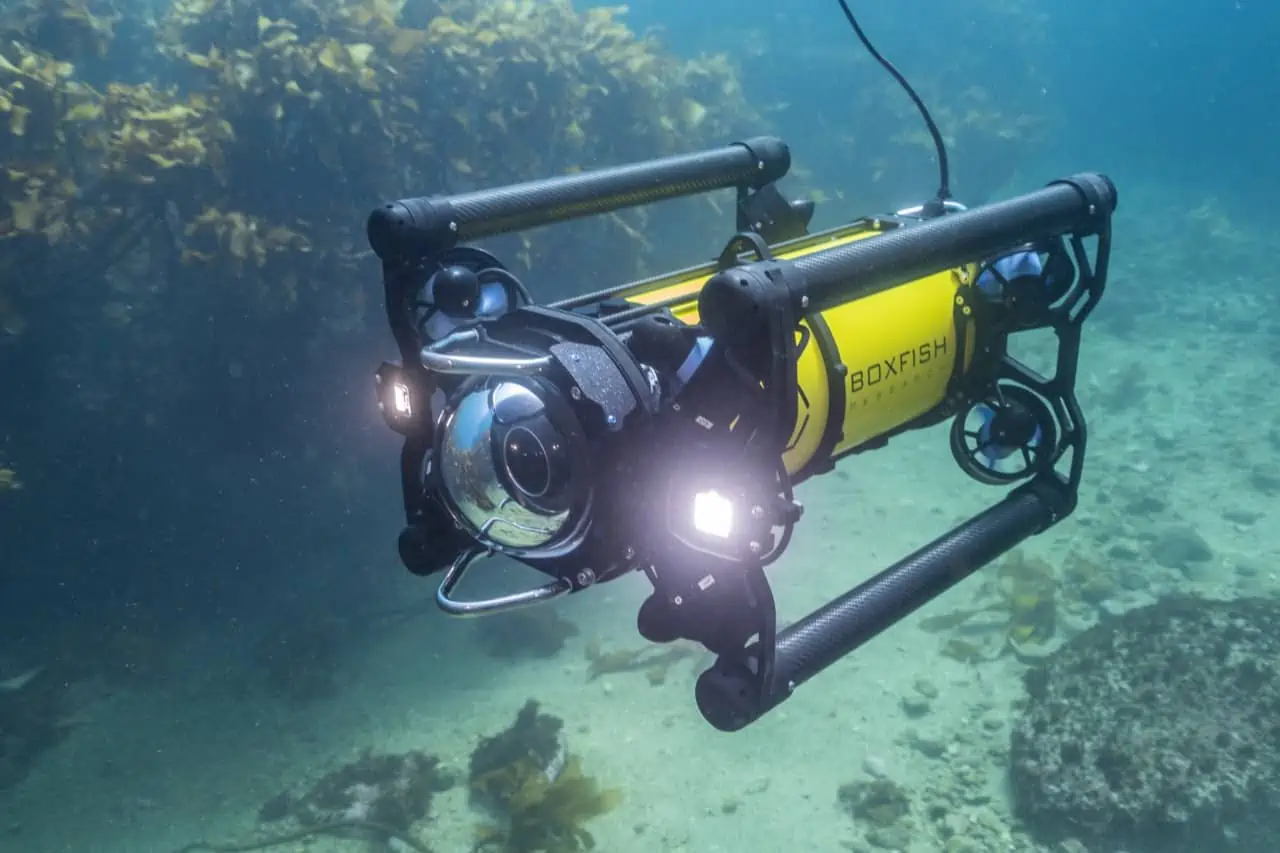
Pojazd do inspekcji podwodnych firmy Boxfish
ROV i UUV do inspekcji podmorskich
vLBC Hybrid ROV Tracked Crawler firmy Teledyne Marine
Roboty ROV są powszechnie wykorzystywane do różnych zadań związanych z inspekcją morską i podwodną, w tym rurociągów i platform naftowych i gazowych, kabli, farm wiatrowych i statków. Roboty ROV są obsługiwane za pomocą linki, zazwyczaj ze statku wsparcia lub z brzegu, i mogą być wyposażone w różne narzędzia i ładunki, w tym kamery wysokiej rozdzielczości, reflektory, sonary i ramiona manipulacyjne. Mogą być również wyposażone w mechanizmy gąsienicowe, które umożliwiają im poruszanie się po powierzchni kadłuba statku.
W celu uzyskania większych możliwości zdalnej inspekcji można zastosować inne pojazdy podwodne (UUV), które nie wymagają linki. Ze względu na fakt, że fale radiowe nie rozprzestrzeniają się dobrze pod wodą, bezpośrednie sterowanie pojazdem bezprzewodowo na dużych odległościach może być trudne, dlatego pojazdy te zazwyczaj działają autonomicznie.
Autonomiczna inspekcja podwodna
AUV Phantom firmy Dynautics
AUV (autonomiczne pojazdy podwodne) mogą wykonywać zadania związane z inspekcją podwodną bez zdalnego sterowania i mogą wykorzystywać sztuczną inteligencję (AI) oraz algorytmy, takie jak SLAM (simultaneous localization and mapping), do nawigacji w swoim otoczeniu. Mogą pozostawać pod wodą przez długi czas i gromadzić duże ilości danych, które mogą być przetwarzane po powrocie pojazdu na powierzchnię.
Bezzałogowe autonomiczne statki znane jako ASV (autonomiczne statki powierzchniowe) mogą być również wykorzystywane do wykonywania prac inspekcyjnych bez konieczności bezpośredniego udziału operatora.
Technologia zdalnie sterowanych pojazdów Boxfish Robotics umożliwia nieinwazyjne badania wizualne w morskich obszarach chronionych, wspierając badania różnorodności biologicznej, wykrywanie rzadkich gatunków i zarządzanie oparte na danych w głębokich i mezofotycznych siedliskach morskich