GNSS/INS (GNSS-aided INS) for Drones & Unmanned Vehicles
Category Presented by
The integration of Global Navigation Satellite Systems (GNSS) with Inertial Navigation Systems (INS) has become a standard approach in the technology of unmanned systems. By combining satellite-based positioning with inertial measurements, GNSS/INS, also known as GNSS-aided INS, offers improved accuracy, reliability, and continuity for drones and other unmanned vehicles.
If you design, build or supply GNSS/INS (GNSS-aided INS), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
GNSS/INS (GNSS-aided INS) for Drones & Unmanned Vehicles
Overview by
Sarah Simpson
Updated:
Modern unmanned vehicles rely heavily on navigation accuracy and stability. Conventional INS, anchored by inertial sensors like accelerometers and gyroscopes, calculates position and velocity by continuously integrating acceleration and angular rate data. This offers excellent short-term performance and independence from external signals. However, drift can be an issue: small sensor errors accumulate over time, leading to position inaccuracies.
GNSS/INS is a fusion approach that combines INS with GNSS-based updates, ensuring consistent and bounded error growth. GNSS provides periodic absolute positioning, correcting drift and significantly enhancing operational reliability, which is critical for long-duration missions or environments where standalone INS may suffer from cumulative errors.
What is GNSS/INS, and how does it work?
GNSS/INS, NAUTILUS, from Honeywell Aerospace.
GNSS/INS is a hybrid navigation method combining satellite-based positioning (from GPS, Galileo, GLONASS, BeiDou) with inertial data to produce accurate, continuous positioning and orientation estimates. Data fusion algorithms, often employing Kalman filters or extended variants, synthesize GNSS fixes with IMU measurements to estimate the vehicle’s state and error covariance.
Sensor fusion Kalman filter merges data to generate robust navigation solutions.
This architecture enables dead reckoning navigation, allowing the INS to estimate position during intervals between GNSS updates. As a result, the integrated system can maintain reliable positioning even in environments with intermittent or obstructed GNSS signals, such as during extended drone missions, in urban canyons, or indoor settings.
Sensor Fusion: Bridging GNSS/INS in Real Time
At the heart of GNSS/INS lies sensor fusion, which combines IMU and GNSS to leverage their unique strengths. The Kalman filter dynamically estimates the navigation solution and sensor errors, while techniques such as dead reckoning navigation ensure continuity between GNSS fixes. This hybrid navigation maintains high inertial navigation accuracy in dynamic flight conditions and short-term GNSS blockages.
Advantages Over Conventional INS
Compared to a standalone inertial navigation system, GNSS/INS integration offers clear benefits:
Reduced drift and error bounding
Reliable vehicle localization in signal-degraded environments
Improved system robustness and autonomy
Better integrity and fault detection, via GNSS aiding
Optimized performance for high-precision navigation
Together, these advantages elevate GNSS/INS-equipped drones and unmanned vehicles above the limitations of dead reckoning alone.
Applications Benefiting from GNSS/INS Over Conventional INS
Aerial Surveying & Mapping
In photogrammetry, LiDAR, and high-resolution mapping, centimeter-level accuracy is vital. GNSS/INS-equipped drones provide high-precision navigation, ensuring sensors are correctly aligned for georeferencing. Traditional INS would drift during long flight lines; GNSS/INS retains accuracy even across vast survey areas.
GNSS/INS, ANELLO GNSS INS, from ANELLO Photonics.
Infrastructure Inspection (Bridges, Pipelines, Power Lines)
Inspecting infrastructure often involves proximity, slow flight near structures, and is prone to GNSS shadowing. GNSS/INS allows inspection drones to maintain accurate position and orientation, even in GNSS-degraded zones, ensuring data integrity and reducing reflight rates.
Agriculture & Forestry Monitoring
Drones operating over fields or forested terrain need reliable navigation to cover predefined routes. GNSS/INS enables consistent RTK-level precision, supporting automated crop health analysis and forestry surveys across multiple flight missions.
Delivery & Logistics
As drone delivery systems mature, accurate navigation between distribution hubs and drop zones becomes essential. GNSS/INS maintains route fidelity and mitigates drift through GNSS-denied areas, such as urban corridors, enabling repeatable and dependable performance.
Search and Rescue & Public Safety
In disaster zones or challenging terrains, GNSS/INS-equipped first-responder drones maintain navigation even amid GNSS signal disruptions. Combined with other sensors, integrated navigation helps emergency services and search and rescue personnel receive reliable situational awareness.
Autonomous Ground & Marine Unmanned Systems
GNSS/INS isn’t limited to aerial use; it also supports autonomous UGVs and surface vessels. These platforms utilize GNSS/INS for path following, obstacle avoidance, and situational awareness, which has been proven to be more reliable than INS-only systems.
Challenges & Considerations
While GNSS/INS offers powerful capabilities, successful deployment requires attention to:
Calibration of inertial sensors and temperature compensation
Handling multipath effects, signal latency, and intermittent blockage
Tuning sensor fusion Kalman filters for diverse dynamic profiles
Integrity monitoring and fault detection are key for safety-critical missions
These considerations inform the design of robust GNSS/INS systems in unmanned vehicles.
Overview of GNSS/INS for Unmanned Vehicles
In summary, GNSS/INS integration revolutionizes unmanned system navigation, surpassing conventional INS in accuracy, reliability, and autonomy. Whether for precision mapping, infrastructure inspection, logistics, or public safety, GNSS/INS empowers drones, land vehicles, and marine robots to operate stably even amid GNSS disruptions. As sensor fusion advances and hardware miniaturizes, GNSS/INS stands at the heart of next-gen navigation for autonomous ventures.
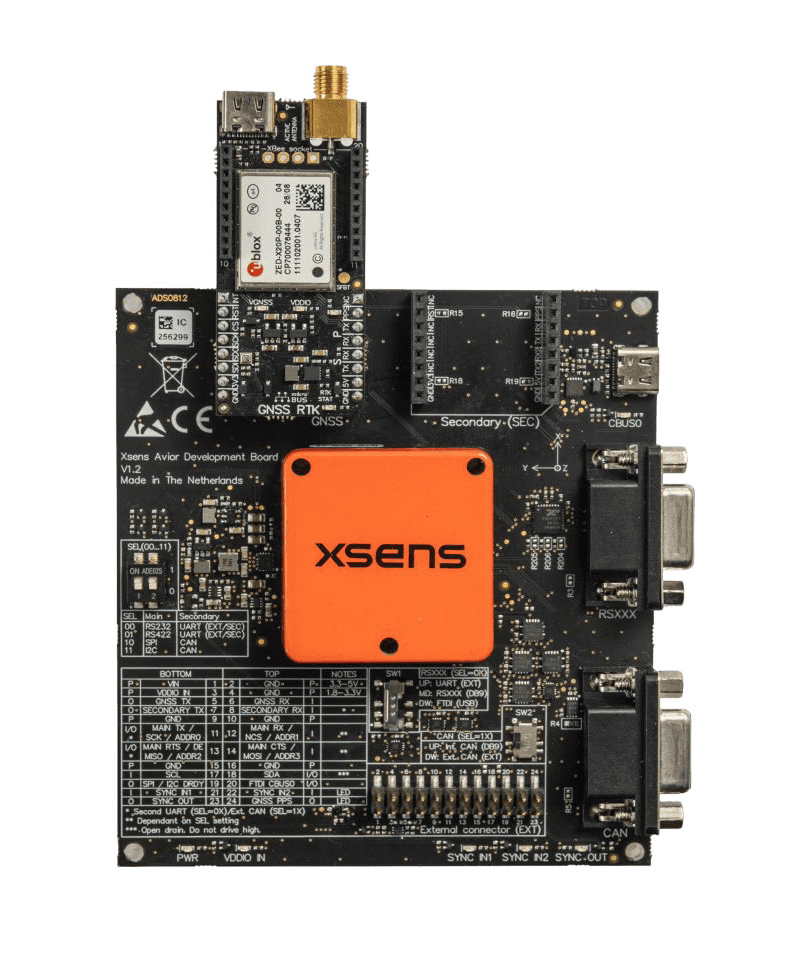
Xsens has introduced Avior GNSS/INS and Avior RTK GNSS/INS modules, combining inertial sensing and u-blox technology for embedded navigation, with centimeter-level RTK positioning capability available
Honeywell Aerospace has introduced a compact embedded GNSS/INS navigation system designed to support resilient unmanned aerial system operations in contested environments where GPS access is unreliable
Trimble Applanix integrates Calian antenna technology into a new hardware enclosure to provide drone manufacturers with a rapid-deployment positioning solution
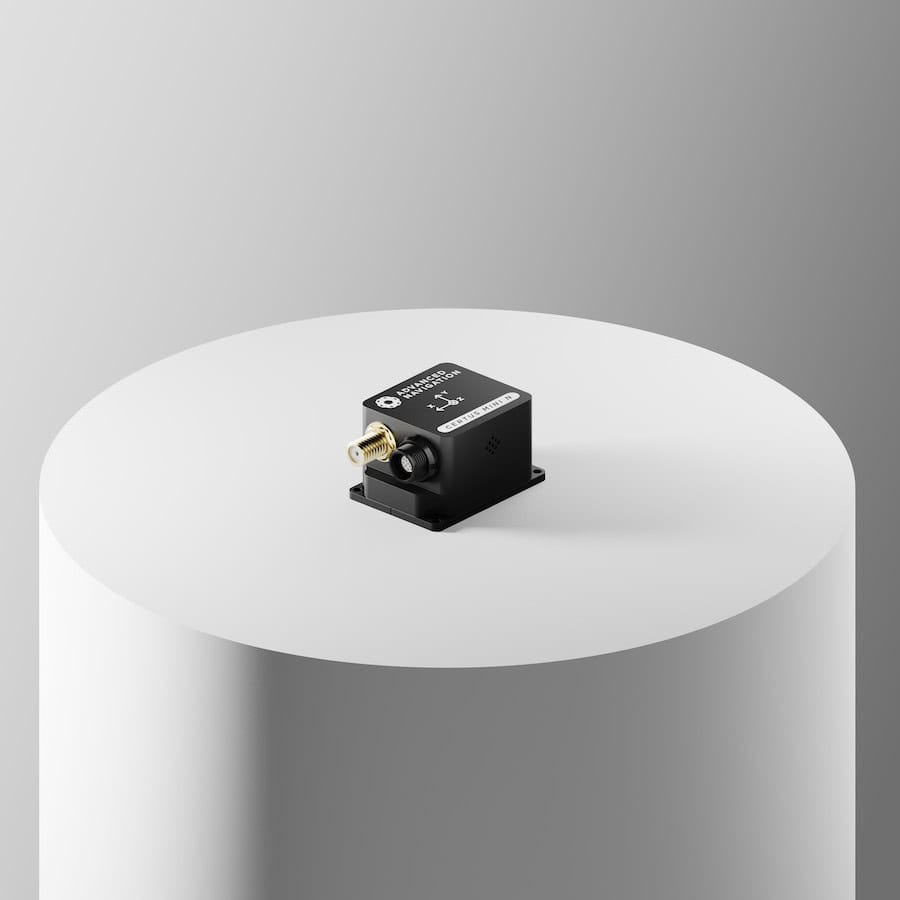
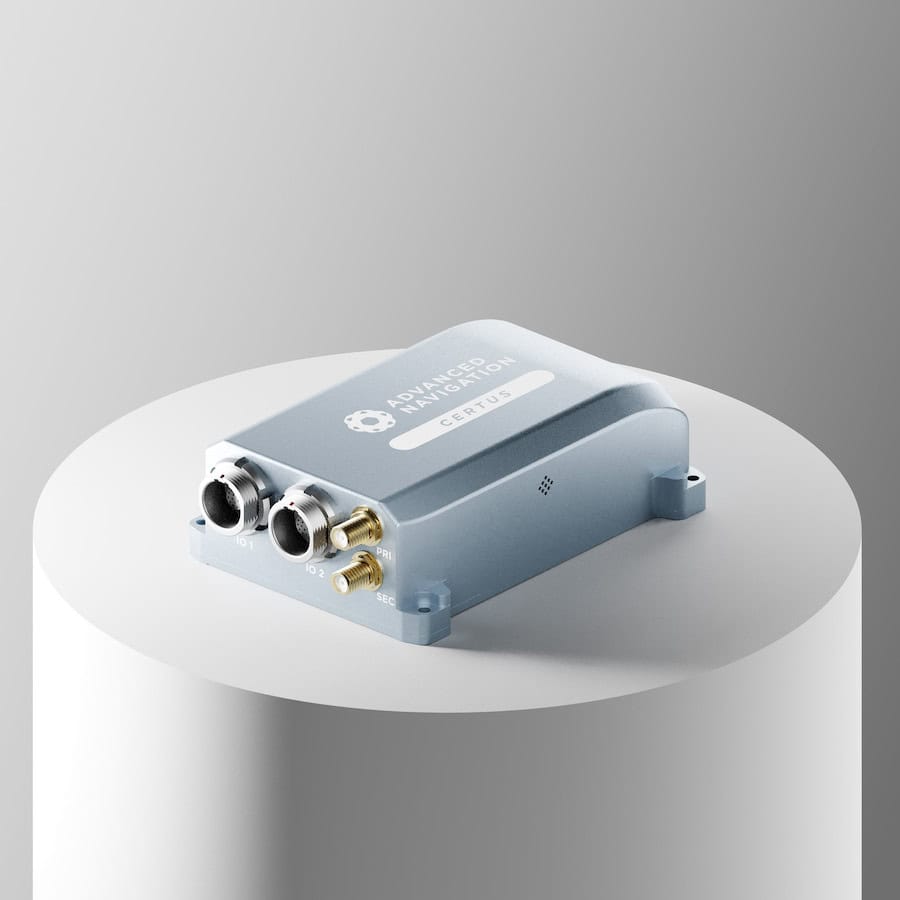
Advanced Navigation's resilient inertial navigation solutions are designed to maintain precise drone tracking and engagement capabilities during electronic warfare conditions and total GPS denial to ensure mission success
ANELLO Photonics is integrating its optical gyroscope technology into BlackSea Technologies’ Chaser uncrewed surface vessel to provide high-precision navigation in GPS-denied environments
Septentrio's comprehensive product portfolio utilizes advanced anti-jamming and anti-spoofing technology and also includes Blue UAS Framework-listed GNSS receivers
Advanced Navigation explains how counter-UAS platforms maintain reliable heading and positioning in GNSS-denied environments, using inertial solutions to support performance on commercial vehicles under jamming and spoofing conditions
This article explores GNSS spoofing risks and how Advanced Navigation delivers resilient INS-based solutions with electronic protection to secure modern autonomous and navigation-critical systems
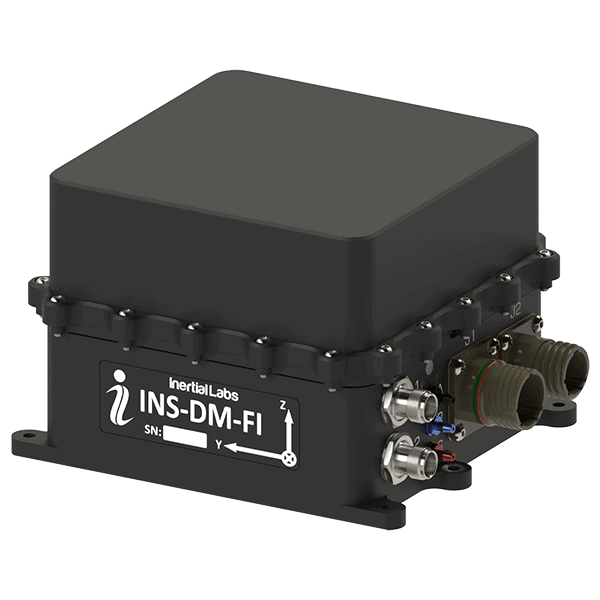
Inertial Labs outlines the integration and flight-tested performance of visual-aided inertial navigation with vision-based positioning, combining inertial measurement data with visual inputs to support accurate localization in GNSS-denied conditions
Mar 27, 2026
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.