

Showcase your capabilities
If you design, build or supply Data Processing, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




From border patrol and construction monitoring to environmental research and military reconnaissance, the effectiveness of UAV operations depends on how well raw data is converted into decisions. As drone technology advances, so does the volume and complexity of data gathered by UAVs and other unmanned systems. Data processing turns this data into usable, actionable insights. This discipline merges sophisticated software, AI, and sensor fusion to unlock the full value of unmanned operations. Whether applied to photogrammetry, anomaly detection, or real-time tracking, processing drone data accurately is crucial for critical missions and commercial applications alike.
Read the Technology Overview
Cutting-Edge Acoustic Positioning & Subsea Imagery Solutions for Unmanned & Robotic Systems

UAV Gimbal Payloads - EO & EO/IR Drone Camera Gimbals for Tactical UAS
Inertial Navigation Systems, INS/GPS, AHRS, and IMU Sensors for Unmanned Systems


Edge AI Video Processing & Streaming Solutions Providing Real-Time Situational Awareness for Mission-Critical UAVs & Unmanned Systems

Industrial-Grade Embedded Computer Systems for AI Edge Computing & Machine Learning
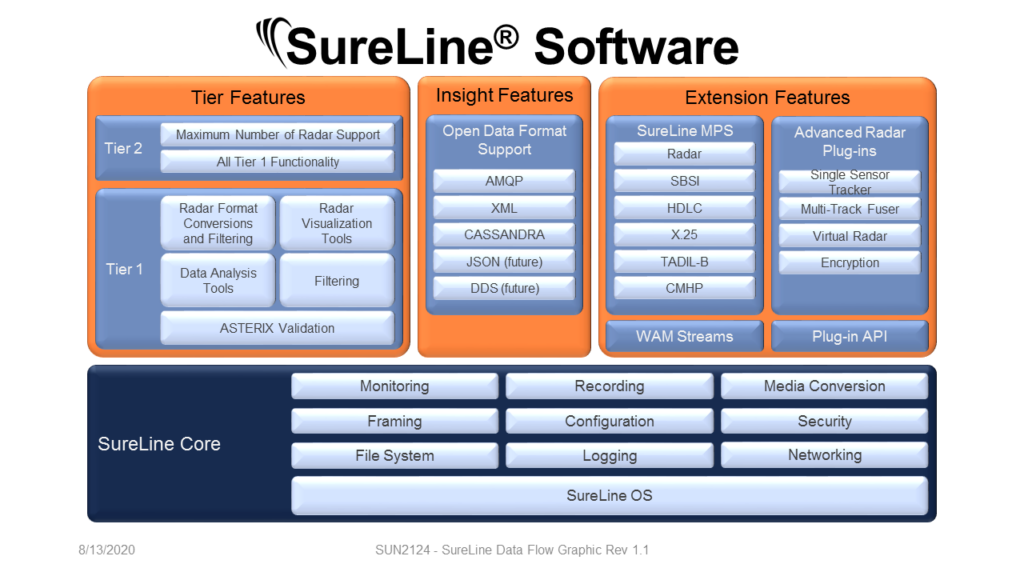
Radar Software & Sensor Processing Solutions, Maritime Radar Control, Tracking & Visualization for USV

Certified UAV Communications, Navigation, Control, Surveillance, and Combat ID Solutions


Onboard Video Processing Software and Hardware for Unmanned Systems

High-Performance Video Graphics, GPGPU, AI/ML Processing & Display Solutions for C5ISR Applications


GNSS Positioning & Navigation Systems, Mobile Mapping UAV LiDAR & Unmanned Surface Vehicles

Radar & ADS-B Surveillance Data Fusion, Integration & Display | UAV Tracking & ATC Integration
If you design, build or supply Data Processing, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Drone data processing refers to the techniques and technologies used to transform raw data captured by UAVs (unmanned aerial vehicles), UUVs (unmanned underwater vehicles), and USVs (unmanned surface vessels) into usable outputs. These outputs may include orthophotos, 3D models, maps, volumetric calculations, or real-time alerts. Effective processing allows informed decision-making across applications such as precision agriculture, infrastructure inspection, environmental monitoring, and search and rescue.
Data gathered in the field is typically processed using desktop software, cloud-based platforms, or third-party service providers. The choice of workflow depends on factors such as data size, required accuracy, turnaround time, and available computing resources.
Modern unmanned systems have advanced sensors and imaging systems that collect diverse data types. These datasets vary in format, processing requirements, and practical applications.

Clarity-HD Drone Data Processing Solution by Trillium Engineering
Captured using standard red-green-blue cameras, RGB imagery forms the foundation for many mapping and inspection tasks. It’s widely used in photogrammetry and visual analytics.
Thermal sensors detect heat variations, useful for detecting equipment faults, energy inefficiencies, and living organisms.
Multispectral sensors capture images at specific wavelength bands beyond visible light. These are essential for biological and environmental analysis.
Hyperspectral sensors record hundreds of narrow spectral bands, allowing detection of subtle material differences.
LiDAR sensors emit laser pulses to create high-resolution 3D maps and point clouds, independent of lighting.
Positional and inertial data from GNSS receivers and IMUs are critical for accurate georeferencing and navigation.
UUVs and AUVs use sonar to map underwater terrain and detect objects in subaquatic environments.
Drone data processing typically follows one of three pathways, each suited to different operational needs, levels of expertise, and project scales:

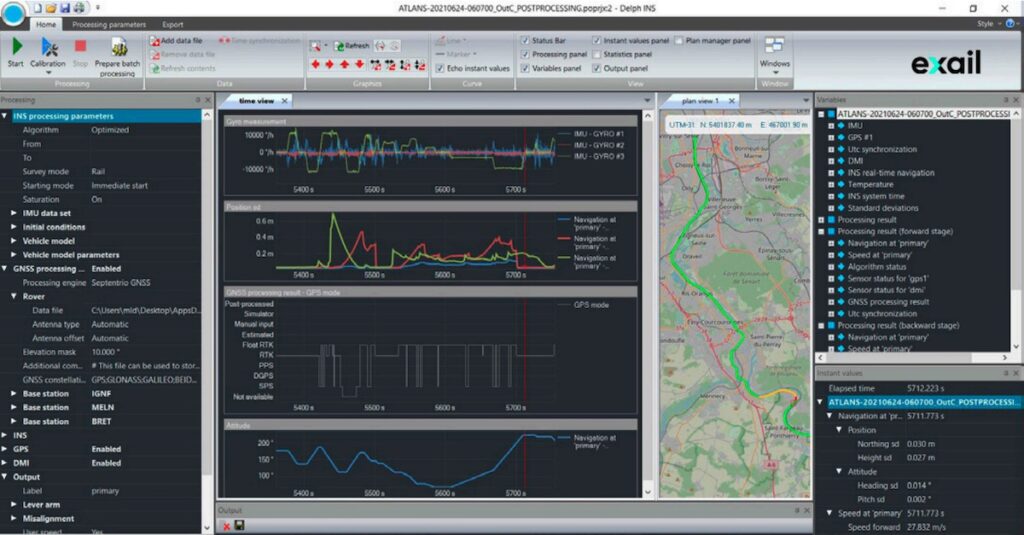
Qinertia Post-Processing Software by SBG Systems
Data is processed using software installed on a desktop computer or local server, offering full control over the workflow and ensuring complete data privacy.
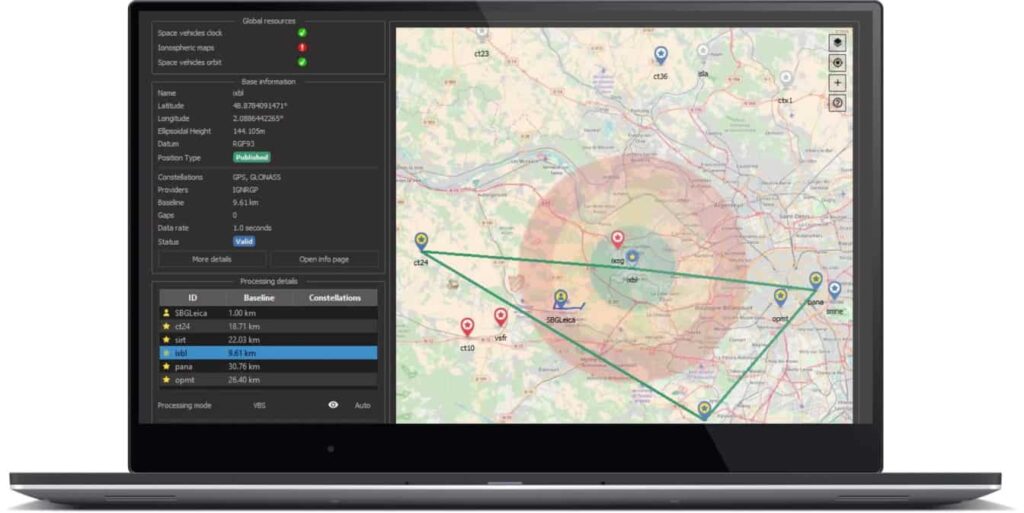
Cloud platforms provide automated processing and utilize scalable remote computing power, enabling rapid handling of large and complex datasets.
Specialized service providers manage the entire data processing workflow using professional-grade tools and expert personnel.
Drone data is rarely useful in its raw form. Effective processing techniques include:
Drone data processing drives insights in a wide array of sectors:
Advanced data processing is fundamental to enabling autonomy in UAVs. Real-time analytics, sensor fusion, and edge AI are essential for:
These capabilities rely heavily on fast, reliable data processing onboard or via secure, low-latency links to ground control stations.
Drone data processing is the critical bridge between raw sensor output and meaningful, mission-critical insights. Whether it’s imagery, LiDAR, thermal, sonar, or telemetry, the ability to collect and process data effectively determines the success of unmanned operations. With a wide range of tools, photogrammetry, AI analytics, edge computing, and data fusion, this field enables applications across agriculture, construction, defense, and beyond.
As sensors improve and drones become more autonomous, the scale, complexity, and speed of drone data processing will continue to grow. Choosing the right tools and workflows is essential for turning UAV data into knowledge and knowledge into action.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.