Showcase your capabilities
If you design, build or supply Gimbal Camera Payloads, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Drone camera gimbals enable stable and high-quality imaging in dynamic conditions. By integrating advanced stabilization technology, these devices ensure that payloads remain steady even during rapid movements, turbulence, or environmental vibrations. With applications ranging from surveillance to mapping, camera gimbals are essential for professionals seeking precision and reliability in aerial imaging.
Read the Technology Overview

Advanced VTOL & Fixed-Wing UAVs | State-Of-The-Art Technologies for Unmanned & Autonomous Aircraft

Multi-Sensor Imaging Gimbals, Searchlights and VMS Software for Air, Land & Maritime Platforms

UAV Gimbal Payloads - EO & EO/IR Drone Camera Gimbals for Tactical UAS

Pioneering Ground Control Stations (GCS), Gimbals & Tactical Solutions for Unmanned Systems & Defense Robotics

Long-Endurance Fixed-Wing & Hybrid VTOL UAVs | UAV Payload Camera Systems | Power Systems
Software-Enabled Gyro-Stabilized Gimbal Systems for UAVs, Unmanned Systems, & Counter-Drone Applications

Miniature Two-Axis Gyro-Stabilized EO/IR Payloads for Commercial & Defense Applications


UAV Gimbal Payloads & Video Processing Solutions – Multi-Sensor EO/IR Drone Camera Solutions

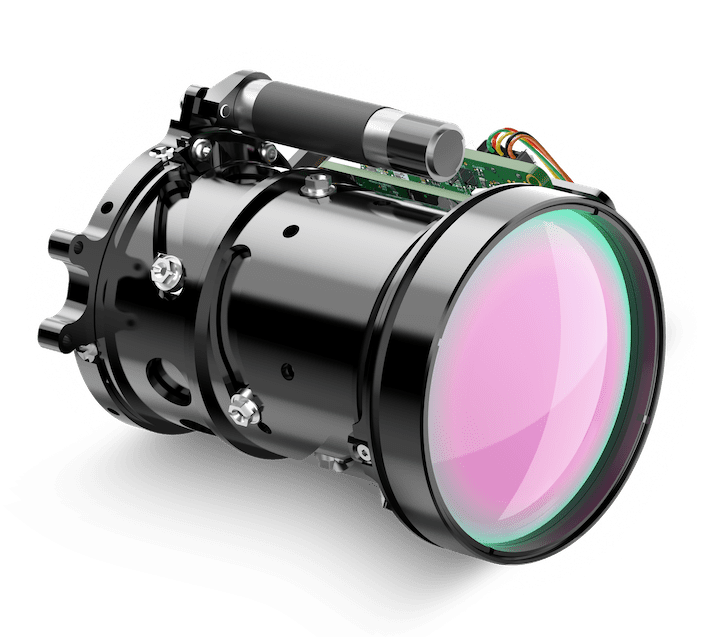
High Performance Infrared Zoom Lenses for UAVs and Drones: Low-SWaP, Extended-Range, Ruggedized Lenses


Cutting-Edge Electro-Optical & Infrared Imaging Gimbals for Advanced UAV ISR & Targeting
Advanced Imaging & Sensor Autonomy for Time-Critical Airborne Intelligence Missions

Innovative NDAA-Compliant Drone Hardware Solutions & Engineering Services

Cinematography Drone Camera Gimbals, Mounts & Stabilizers - Custom and COTS Gimbals

Professional Drones, Quadcopters, Multirotors & Hexacopters for Cinematography, Survey & Inspection

Gyro-Stabilized Imaging Gimbal Systems for UAVs & Unmanned Systems

If you design, build or supply Gimbal Camera Payloads, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

A camera gimbal is a device that holds and often stabilizes mounted cameras, minimizing unwanted movements and vibrations for smooth, steady footage. It achieves this using a combination of motors and an Inertial Measurement Unit (IMU) to maintain a level orientation across multiple axes. Depending on its configuration, a gimbal may stabilize along two axes (pitch and roll) or three axes (pitch, roll, and yaw), with three-axis gimbals offering superior stability and image quality.
Gimbals ensure drone cameras can capture clear, high-resolution imagery regardless of aerial turbulence or the motiaircraft’s motion compensating for external forces. Camera gimbals enable consistent and professional results for various applications, from filmmaking to industrial inspections.
Camera gimbals are typically categorized based on the type of motor system they use. These can be divided into two categories:
These utilize brushless motors for fast, smooth, and precise stabilization. Brushless gimbals deliver exceptional image quality, making them ideal for demanding tasks such as professional videography and high-precision mapping.

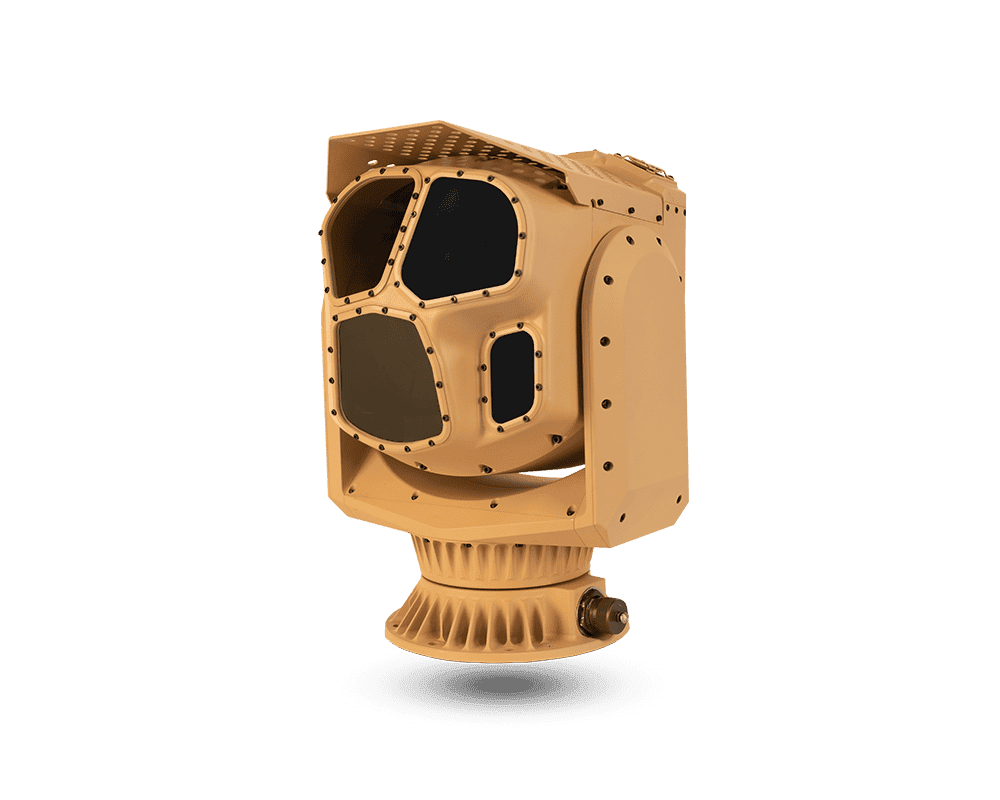
TrakkaCam TC-375 Camera Gimbal for Drones by Trakka Systems
Servo gimbals use servo motors, which are lighter and simpler than their brushless counterparts. Although they provide less refined stabilization, their reduced weight makes them suitable for smaller UAVs with strict payload limitations.
Both types of gimbals serve distinct needs, and the choice depends on the specific application and the capabilities of the drone or UAV.
Modern gimbals are equipped with motorized stabilization systems and IMUs to actively respond to motion and vibrations. This technology compensates for yaw, pitch, and roll, ensuring smooth and stable footage in diverse operational conditions.
Gimbal camera payloads also include features such as:
These payloads are often modular, allowing operators to swap between different cameras and sensors as mission requirements evolve.
The versatility of gimbal cameras makes them suitable for a broad range of commercial drone applications:
Gimballed cameras are a cornerstone of Intelligence, Surveillance, and Reconnaissance (ISR) missions. They provide stable and reliable imaging and support law enforcement, border security, and military operations.
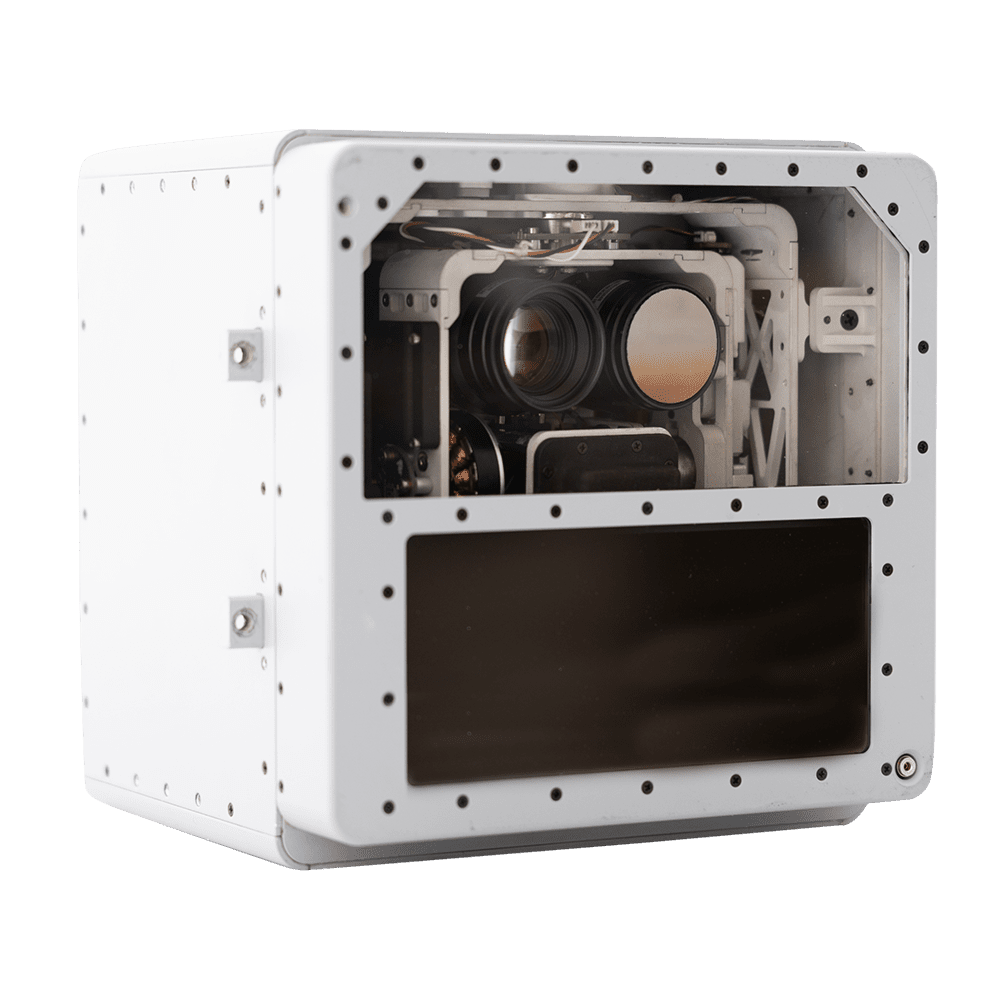
HD80 Drone Camera Gimbal by Trillium Engineering
Camera gimbals enable drones to capture precise geospatial data, creating detailed maps for urban planning, agriculture, and environmental monitoring.
Professional filmmakers and broadcasters rely on camera gimbals for dynamic aerial shots that demand steadiness and visual clarity.
Gimbal cameras support inspections of infrastructure such as power lines, pipelines, and wind turbines, offering stable imaging for safety and maintenance assessments.
Selecting the right camera gimbal for your UAV depends on several factors:
Camera gimbals are indispensable for drones and UAVs. They offer unparalleled stabilization and versatility for a wide range of applications, from delivering crystal-clear imagery for surveillance to capturing cinematic shots for the entertainment industry. These devices are engineered to perform under diverse and challenging conditions.
Whether you require a lightweight servo gimbal for a compact UAV or a high-performance brushless system for professional-grade imaging, camera gimbals provide the stability and precision needed to elevate your drone operations.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.