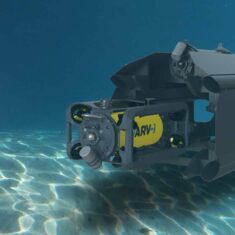
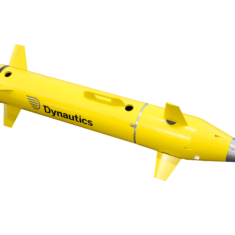
AUVs & Autonomous Submarines
Autonomous Underwater Vehicles (AUVs) are a subset of Unmanned Underwater Vehicles (UUVs) that can function without real-time control from a human operator. They can be programmed to follow mission waypoints along a predetermined route and collect data or activate other payloads. Some autonomous submarines may use artificial intelligence (AI) capabilities to make decisions and react to changes in their environment.