Inertial Navigation Systems (INS) for Drones and Other Unmanned Platforms
Inertial navigation systems (INS) are a key component in enabling autonomous navigation in drones and other unmanned systems. By continuously measuring rotation and acceleration, INS enables precise tracking of position, velocity, and orientation, even when GPS or other external signals are unavailable. As unmanned aerial vehicles (UAVs), unmanned ground vehicles (UGVs), unmanned surface vehicles (USVs), and other platforms become increasingly autonomous and deployed in complex environments, the importance of robust INS solutions cannot be overstated.
If you design, build or supply Inertial Navigation Systems (INS), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
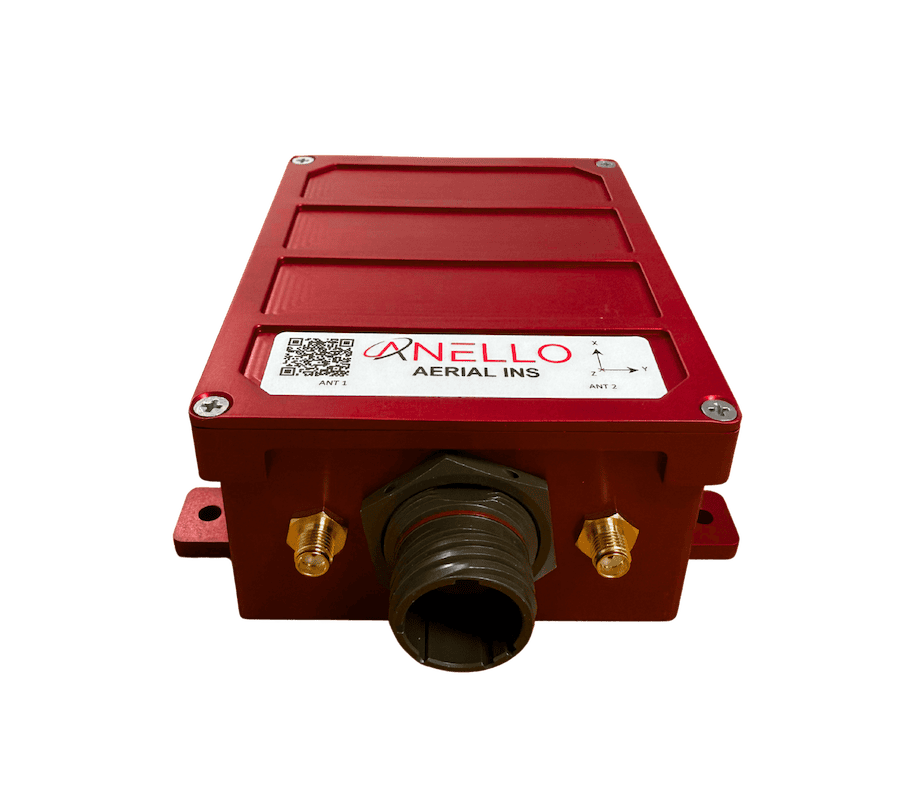
High-accuracy inertial navigation system engineered for GNSS-denied environments
High-accuracy inertial navigation system engineered for GNSS-denied environments
The VINSInertialNavigationSystem delivers precise positioning and orientation for unmanned... ...high-precision navigation solution designed for unmanned vehicles and autonomous platforms operating...
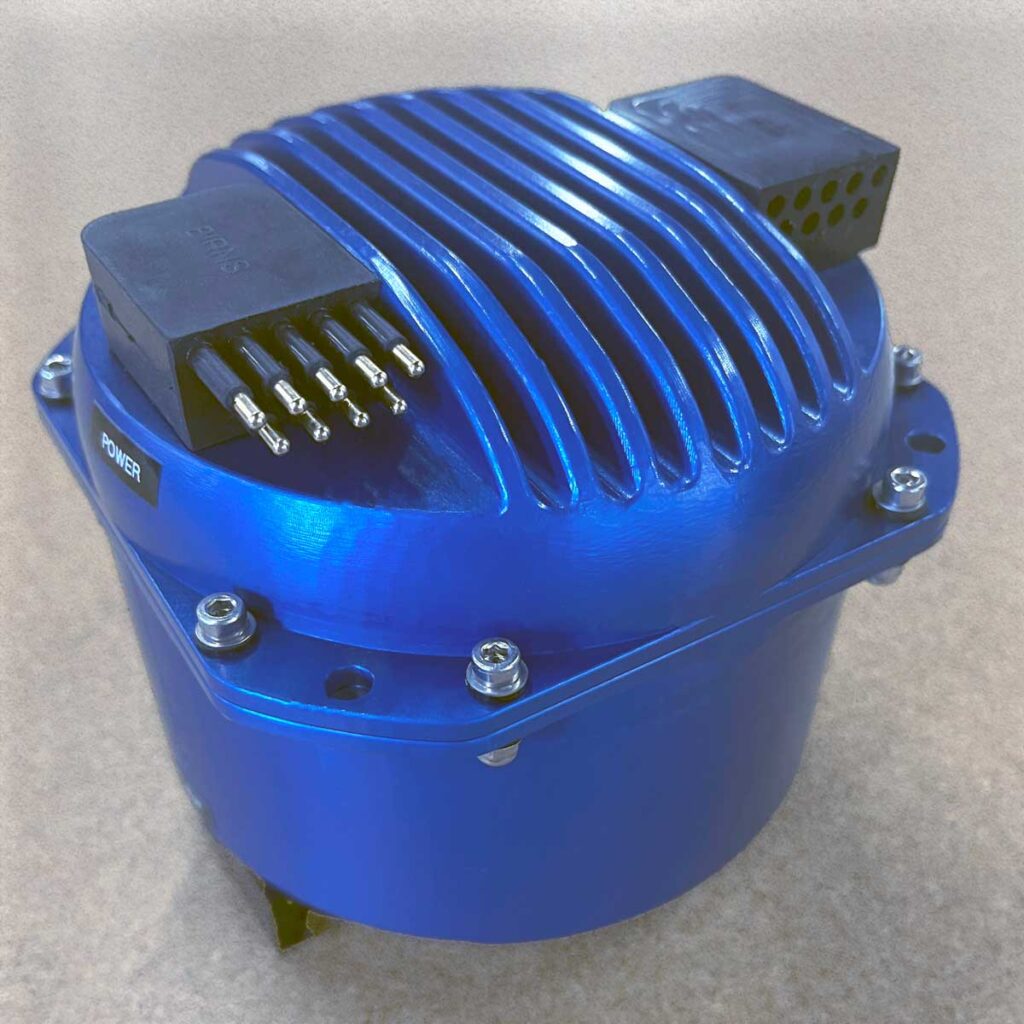
Compact FOG-based AHRS & INS with north-seeking gyrocompass
Compact FOG-based AHRS & INS with north-seeking gyrocompass
...ding Reference System (AHRS) and InertialNavigationSystem(INS) designed for precision navigation... ...nclude defense navigation, guidance, and control systems, as well as mining equipment alignment and...
...ature Advanced Navigation’s revolutionary AI-powered fusion algorithm that delivers accuracy... ... wide range of drone and robotics applications, and are seamlessly compatible with industry-standard...
Integrated navigation & autonomy platform for small underwater vehicles
Integrated navigation & autonomy platform for small underwater vehicles
...he company’s inertialnavigationsystem(INS) product line, building directly on the proven GS4... ... complete GNCC platform, the IQNS provides onboard processing power for AI/ML applications such as...
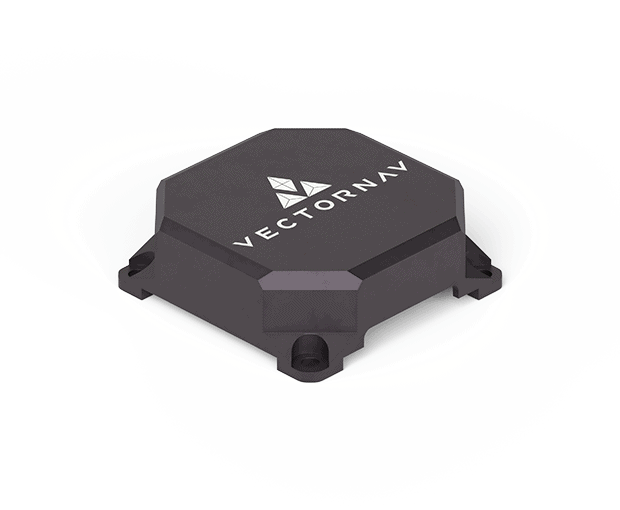
High performance INS in an extremely compact form factor
High performance INS in an extremely compact form factor
...efits from SBG Systems unique experience in designing and manufacturing inertial sensors, including... ...combination of navigation performance and SWAP-C. Quanta Micro leverages a survey grade IMU for...
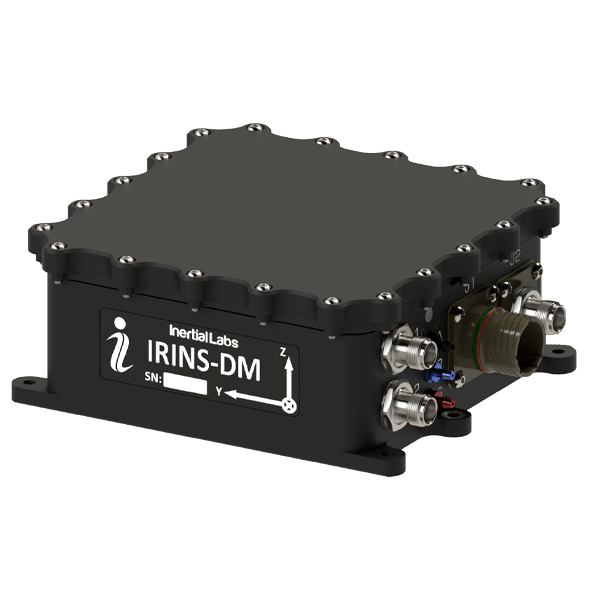
Rugged, Highly Accurate FOG-based INS and AHRS with Embedded GNSS
Rugged, Highly Accurate FOG-based INS and AHRS with Embedded GNSS
... GEO-FOG 3D™ inertialnavigationsystem(INS) is a commercial off-the-shelf navigation and control... ...ture satellite navigationsystems including GPS, GLONASS, GALILEO, and BeiDou. It also offers data...
MEMS-based INS & inertial sensors for UAVs & unmanned systems
MEMS-based INS & inertial sensors for UAVs & unmanned systems
Aeron Systems, represented by UAV Propulsion Tech, produces proven MEMS-based inertial sensing... ......; MEMS accelerometer and magnetometer-based unit ideal for UAV/USV/UUV compassing and navigation...
Inertial Navigation Systems (INS) for Drones and Other Unmanned Platforms
Overview by
Caroline Rees
Updated:
Inertial navigation systems (INS) empower drones, unmanned vehicles, and maritime platforms with precise positioning, even when GPS fails.
By fusing gyroscope, accelerometer, and magnetometer data through robust filters, such as the Kalman algorithm, INS enables reliable navigation under GNSS-denied conditions. While MEMS‑based INSs are well suited to compact RPAs, navigation‑grade systems serve tactical, maritime, and defense needs.
How Inertial Navigation Systems Work?
HGuide o480 Inertial/GNSS Navigator, from Honeywell.
An INS relies on a network of inertial sensors, gyroscopes, accelerometers, and often magnetometers, to compute real-time position and orientation through dead reckoning. Gyroscopes measure angular velocity (heading, roll, pitch), while accelerometers record linear acceleration in multiple axes. Magnetometers provide heading references aligned with Earth’s magnetic field to mitigate drift.
These raw measurements are processed through computational algorithms, such as Kalman filters, which fuse sensor readings, reference inputs (like GNSS when available), and inertial dynamics, yielding refined estimates of navigation states. This continuous sensor fusion corrects biases, minimizes drift, and improves accuracy.
Core INS Components
Gyroscopes (gyros)
Gyroscopes are essential to inertial navigation systems, measuring angular velocity along the platform’s axes: pitch, roll, and yaw. In unmanned platforms, particularly drones, MEMS gyroscopes are often used due to their compact size and low power consumption. For higher accuracy applications, such as in tactical UAVs or underwater vehicles, fiber-optic or ring-laser gyros provide significantly greater stability and lower drift rates. Fiber optic gyroscopes (FOG), in particular, are valued for their rugged design, long-term reliability, and absence of moving parts, making them well suited to harsh or dynamic environments.
Accelerometers
MEMS Inertial Navigation System from GuideNav.
Accelerometers detect linear acceleration across multiple axes, allowing the INS to estimate changes in velocity and displacement. Inertial navigation systems double-integrate acceleration data to compute position; however, this process can introduce errors over time. Advanced filtering and bias correction are used to mitigate drift. MEMS accelerometers are commonly used in lightweight platforms, while high-performance systems benefit from more sensitive and lower-noise variants.
Magnetometers
Magnetometers measure the Earth’s magnetic field to provide heading information. These sensors act like digital compasses, offering a global reference point to help mitigate yaw drift in inertial calculations. However, they are sensitive to magnetic interference, particularly in electrically noisy environments or near ferrous materials. Despite this, magnetometers remain a key component in many small and mid-size drone navigation systems.
GNSS receivers
When available, GNSS receivers significantly enhance INS performance by correcting accumulated errors in position and velocity estimates. Many INS configurations use tightly coupled GNSS/INS integration, with RTK corrections or dual-antenna GNSS modules enabling high-precision navigation. This is especially valuable in applications requiring centimeter-level accuracy, such as surveying or precision agriculture.
Barometric altimeters
For vertical positioning, barometric altimeters offer an alternative or supplement to GNSS-derived altitude. These sensors infer elevation by measuring atmospheric pressure, which changes with height. While subject to drift and weather variability, barometric data can be stabilized through periodic calibration or fusion with GNSS and inertial estimates.
Embedded computational software
INS systems rely on embedded software to process sensor data in real time. Kalman filters—particularly Extended Kalman Filters (EKF)—are the most common fusion algorithms, combining inertial data with external inputs to refine navigation estimates. Software must account for sensor drift, environmental changes, and real-time processing constraints, especially in high-dynamic or GNSS-denied environments.
Types of INS for Unmanned Platforms
Navigation-grade INS
Navigation-grade INS (also known as conventional or standalone INS) utilizes high-grade sensors, such as ring laser gyros (RLG) or fiber optic gyros (FOG), and precision accelerometers. These systems are capable of delivering highly accurate position and orientation data over extended periods without external input; however, they are typically large, expensive, and power-hungry. They are used in aerospace, submarines, and other mission-critical platforms where long-term reliability is essential.
Standalone MEMS INS
MEMS INS uses microelectromechanical systems (MEMS) gyroscopes and accelerometers. These systems are significantly smaller, lighter, and more energy-efficient, making them ideal for drones, consumer electronics, and portable platforms. However, they typically suffer from higher drift rates and lower accuracy over time compared to navigation-grade systems.
Tactical/military INS
Tactical-grade INS bridges the gap between MEMS and navigation-grade systems. They utilize higher-grade inertial sensors with enhanced bias stability and reduced drift. These systems are used in military UAVs, ground vehicles, and certain industrial applications that require better accuracy without the cost or bulk of full navigation-grade INS.
GNSS-aided INS (GNSS/INS) systems
GNSS/INS or integrated INS fuse inertial data with GNSS (Global Navigation Satellite System) input to correct for drift and improve accuracy over time. These hybrid systems are common in both commercial and military applications, especially where intermittent GNSS signal loss is expected, such as urban canyons, under canopy, or in contested environments.
Other Unmanned Vehicles
UGVs (Unmanned Ground Vehicles)
INS supports odometry in conditions where wheel encoders become unreliable, such as during slippage or terrain transitions. It works in conjunction with cameras, computer vision systems, LiDAR, and vehicle management systems to enhance overall navigation and autonomy.
USVs & autonomous surface vessels
INS provides heading and position in maritime environments. Coupled with GNSS and compass systems, they support deep-sea navigation, offshore surveys, and vessel stabilization.
UUVs & AUVs (Underwater Vehicles)
Often operate submerged where GNSS is unavailable. INS is essential, using inertial sensors, DVL (Doppler velocity log), depth sounders, sonar, and pressure altimeters for underwater navigation.
INS Performance
The performance of an inertial navigation system is typically evaluated by its attitude accuracy, position drift, and stability over time. High-end systems, such as those used in tactical UAVs or maritime platforms, can maintain orientation within 0.1 degrees and limit position drift to under a meter per hour. In contrast, compact MEMS-based systems for small drones are generally accurate within 0.5 to 1 degree, although they exhibit higher drift rates. Other important factors include the system’s update rate, bias stability, and ability to maintain accurate altitude, especially when GNSS signals are weak or unavailable. These metrics are critical when selecting an INS for applications that demand precise, uninterrupted navigation.
Integration Challenges & Best Practices
Sensor selection must balance size, weight, power, and cost based on platform constraints. Smaller UAVs typically use MEMS sensors, while larger or mission-critical systems may incorporate tactical-grade IMUs. Calibration is essential to correct for temperature drift, mechanical misalignment, and vibration influences. Software must be robust, capable of running high-frequency filtering (e.g., EKF) in real-time to combine data from inertial sensors, GNSS, and optionally, vision or LiDAR systems.
For GNSS-denied operations, systems must be capable of autonomous mode-switching and error handling, while long-duration missions require exceptionally low-drift navigation and precise modeling of dynamic conditions. Regulatory considerations may also require system certification, especially in defense, aerospace, or maritime applications.
INS vs GPS
GNSS/INS systems offer optimal performance by fusing satellite positioning with inertial estimates, correcting for drift, and increasing reliability. Pure INS, while resilient to jamming and obstructions, suffers from error accumulation over time. Hybrid approaches, particularly tightly coupled architectures, enable the simultaneous processing of raw GNSS data and IMU data within filtering algorithms, resulting in improved performance in challenging environments.
Computational Considerations
Inertial navigation software must process sensor inputs with minimal latency to ensure accurate navigation. Real-time Kalman filtering, typically running at 50 to 200 Hz, is required to maintain responsive navigation. Advanced systems, including visual-inertial navigation systems (VINS), integrate additional sensors, such as LiDAR, vision, and radar, to enhance spatial awareness and precision, particularly in GNSS-denied or low-featured environments. The choice of onboard processor and system architecture has a significant influence on system performance, particularly when computational overhead must be kept low.
Applications
Inertial navigation is essential in precision mapping and aerial surveying, where GNSS-aided INS systems with RTK GNSS deliver centimeter-level accuracy. In drone-based delivery and inspection, robust INS maintains stability and flight control even in cluttered or obstructed areas. In the maritime domain, USVs and AUVs rely on INS for reliable heading, depth, and stabilization in dynamic sea conditions. Tactical and defense applications require high-accuracy, jam-resistant systems that can maintain orientation and position with minimal external input.
Mission-Grade Performance
While GNSS integration improves overall performance, INS alone is essential for operations in GNSS-denied environments, such as indoors, underwater, urban canyons, or under jamming conditions. INS systems scale from cost‑effective MEMS solutions in small drones to highly stable navigation-grade units used in defense, maritime, and tactical applications. Understanding sensor specs, drift behaviors, filtering algorithms, and integration strategies is key to achieving mission‑grade navigational performance.
Honeywell Aerospace has introduced a compact embedded GNSS/INS navigation system designed to support resilient unmanned aerial system operations in contested environments where GPS access is unreliable
Advanced Navigation has developed inertial navigation systems that deliver low latency data to stabilize tracking systems and kinetic effectors, providing a cost-effective, scalable solution for modern mobile counter drone platforms
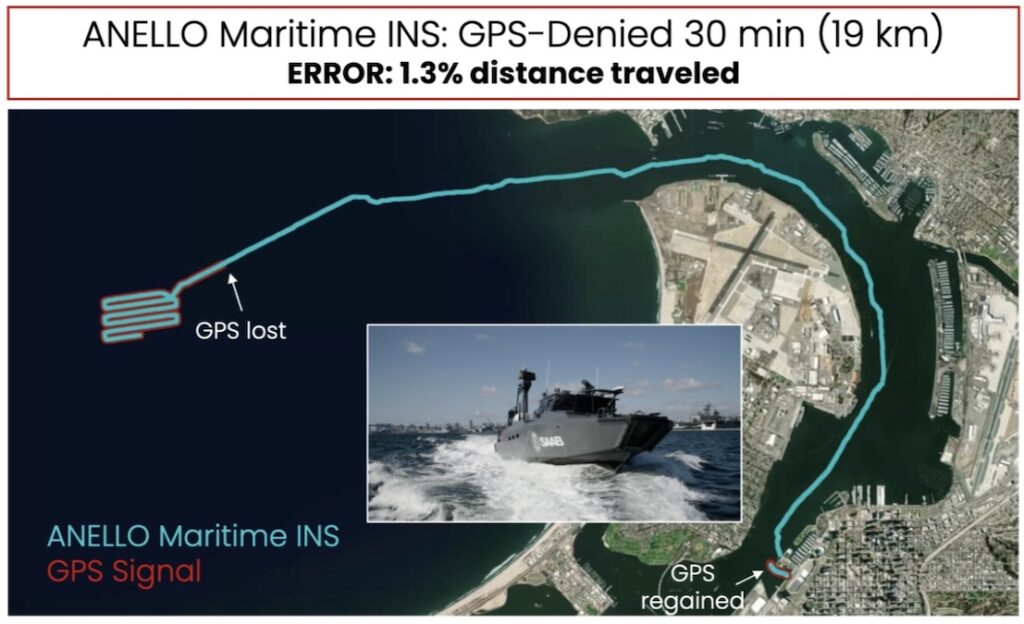
ANELLO Photonics explores how its SiPhOG™-based Maritime INS enables resilient low-drift navigation for maritime platforms operating in GPS-denied environments
Trimble Applanix integrates Calian antenna technology into a new hardware enclosure to provide drone manufacturers with a rapid-deployment positioning solution
ANELLO Photonics has raised $25 million in a Series B-2 round to accelerate the production of its silicon photonics-based navigation systems designed for autonomous operations in GPS-denied and contested environments
Advanced Navigation's resilient inertial navigation solutions are designed to maintain precise drone tracking and engagement capabilities during electronic warfare conditions and total GPS denial to ensure mission success
Advanced Navigation has developed resilient, ITAR-free inertial navigation systems designed to maintain absolute positioning confidence for naval vessels operating within highly contested environments where GPS signals are frequently jammed or corrupted
ANELLO Photonics is integrating its optical gyroscope technology into BlackSea Technologies’ Chaser uncrewed surface vessel to provide high-precision navigation in GPS-denied environments
Septentrio's comprehensive product portfolio utilizes advanced anti-jamming and anti-spoofing technology and also includes Blue UAS Framework-listed GNSS receivers
Apr 16, 2026
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.