Overview
Inertial Navigation Systems (INS)

Inertial Guidance Systems for Drones, UAVs, UGVs
Due to their self-reliance, inertial navigation systems are extremely well-suited to the field of unmanned systems, widely used on Unmanned Aerial Vehicles (UAV) Unmanned Surface Vessels (USV) and Unmanned Ground Vehicles (UGV). Inertial guidance systems can be utilised in harsh environments, are not susceptible to jamming, and emit no significantly detectable radiation.
Unmanned vehicles such as drones, UAVs, USV, UGV incorporating INS systems are utilised in a wide range of applications including defense and security, aerial mapping and survey, and search and rescue.

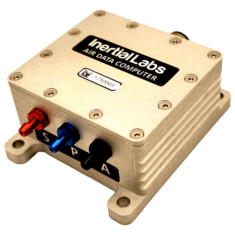
EMCORE FOG-based Inertial Navigation System
How Inertial Navigation Systems Operate
Many methods of navigation, including piloting, radio navigation and celestial navigation, rely on external objects or sources of information such as landmarks, celestial objects, satellites or transmitters. Inertial navigation is a self-referential method by which a system may track its own position, orientation and velocity (once given initial values for these parameters) without the need for such external references.
If the acceleration of an object is known, it is possible to use mathematical integration to calculate the velocity. Thus, accelerometers are required for inertial navigation. The orientation of the system in space also needs to be known. This can be kept track of using gyroscopes, which measure angular rate (change of angular velocity). Inertial navigation systems can also make use of magnetometers, which measure the strength and direction of the Earth’s magnetic field and use this to calculate the system yaw as well as estimate its heading.
IMU INS Systems
Individual inertial sensors can only measure along a single axis, so multiple sensors are grouped together into an inertial measurement unit (IMU). A three-dimensional IMU will consist of three accelerometers, mounted orthogonally to each other, and three gyroscopes, also mounted orthogonally. It may also incorporate magnetometers, although not all IMUs do.
A standalone IMU produces no navigation outputs, just the acceleration, angular rate and magnetic measurements. IMU INS combine an IMU with a navigation computer that processes the sensor outputs to continuously calculate the position, orientation and velocity of the system.

MEMS INS & FOG INS
The inertial sensors in an INS will typically be constructed using either MEMS (microelectromechanical systems) or FOG (fiber optic gyro technology). As a general rule, MEMS INS will be smaller, lighter and lower-cost, whereas FOG INS provide higher performance but can be larger, heavier and more costly.
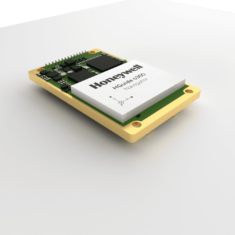
Embedded GPS Inertial Navigation System

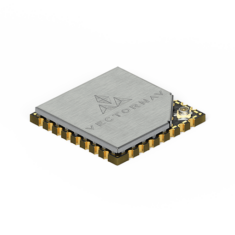
VectorNav VN-300 Dual GNSS INS Inertial Navigation System
Small errors in the measured acceleration can, over time, be compounded into larger errors in system-calculated velocity and position. To provide the system with greater accuracy, drone INS may be combined with another source of information such as a GPS, or, under conditions where GPS navigation may be unreliable or unavailable, a computer vision processing unit.
The ability of the IMU to measure rapid changes in linear acceleration and angular velocity is thus combined with the extra information from the second system to form a more accurate estimation of the UAV’s navigational parameters.
Combining INS and GPS Data
A GNSS-INS navigation system that hybridises inertial navigation with GPS or computer vision will use an algorithm that fuses together the multiple sources of information. One of the most common algorithms is the Kalman filter.
The Kalman filter continuously tracks and updates estimates of the UAV’s position, using the computed errors to improve future estimates. If one of the alternative sources of information is computed to be more accurate than the INS, it can be used to help correct the overall drone position estimate.
Products (64)
Refine
Applications
Attributes
Weight
matching products




Related Articles
Exail’s Compact INS Picked for Next-Gen AUV
The integration of Exail's Phins 9 Compact Inertial Navigation System (INS) will empower Bedrock to achieve high navigational accuracy, address operational efficiencies, and mitigate Total Horizontal Uncertainty (THU) and Total Vertical Uncertainty (TVU)
Mar 15, 2024
New SWaP-C Optimized Inertial Navigation System for AUVs
The new compact high-performance inertial navigation system (INS), Phins 9 Compact, is designed for all unmanned underwater vehicles (UUV) and offers a high blend of navigation performance, reliability, and Size, Weight, and Power (SWaP) efficiency
Mar 7, 2024
Ashtead Technology Expands Rental Fleet with Purchase of Exail’s Rovins 9-DVL
Ashtead Technology becomes the first rental company to adopt Exail's new INS/DVL technology, a high-performance navigation system that seamlessly integrates Inertial Navigation System (INS) and Doppler Velocity Log (DVL) functionalities
Feb 21, 2024
DTC & Inertial Labs’ Integrated Uncrewed Systems Solution for GNSS-Denied Environments
The new solutions combines technologies from Domo Tactical Communications (DTC) and Inertial Labs to create a single navigation, command and control (C2), and intelligence, surveillance and reconnaissance (ISR) system
Feb 19, 2024
























Platinum Partners
Gold Partners
Silver Partners
GNSS INS
Marine Inertial Navigation Systems
Attitude and Heading Reference Systems (AHRS)
Inertial Measurement Units (IMU)
Fiber Optic Gyroscopes





 Join Thousands of Unmanned Systems Professionals
Create a UST Pro account to get full website access, the weekly eBrief and exclusive event discounts.
Join Thousands of Unmanned Systems Professionals
Create a UST Pro account to get full website access, the weekly eBrief and exclusive event discounts.