Showcase your capabilities
If you design, build or supply Quadcopter Drones, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Professional quadcopters are multirotor unmanned aerial vehicles (UAVs) designed for commercial, industrial, or military use, offering vertical takeoff and landing (VTOL) along with highly stable hover capabilities. They are widely deployed across defense, public safety, aerial photography, cinematography, precision agriculture, and infrastructure inspection, where reliability, maneuverability, and sensor integration are critical to mission success.
Read the Technology Overview

Multi-Constellation GNSS Module for Ultra-Reliable Positioning & Navigation

Fully Autonomous Multirotor Drones & Hybrid VTOL UAVs With AI Capabilities

Drone Technology Supplier & Drone Service Provider for Public Safety, Transportation & Training

Quadcopter Airframes and Complete Drone Solutions for Civilian, Commercial, and Military Applications

Innovative Turnkey UAS Solutions for Mission-Critical Civilian & Defense Applications

State-Of-The-Art NDAA-Compliant Drones & Ground Control Stations for Mission-Critical Operations

Advanced Aerial Intelligence & Situational Awareness Technologies for Military, Security & Civilian Applications

Professional, US-Made Multirotor Drones for Commercial & Government Applications

Heavy-Duty, Heavy Payload Drones for Industrial Inspections, Public Safety and Search & Rescue

Customizable, Long-Range Fixed-Wing Drones - Twin-Wing Design Heavy Lifting Drones

Hydrogen-Powered UAVs for Long-Endurance Industrial Inspection & Security Operations

NDAA-Compliant Heavy-Lift Drones | Certified Drone Parachutes | Engineering & Flight Operations Support

Cutting-Edge USA-Made Helicopter & Multirotor UAVs for Demanding Industrial Applications

Cutting-Edge Drone Autopilots & UAS Platforms | Hardware & Software Solutions for Drones & Unmanned Systems

Revolutionary Tethered Unmanned Aerial Systems for Tactical, Commercial & Industrial Applications

AI-Powered Autonomous Drone Solutions for Public Safety, Defense, and Industrial Inspection

Commercial Heavy-Payload Drones for Heavy-Lift Cargo Transportation & Logistics

Commercial Drones for Delivery, Surveying, Agriculture, Security & Mapping - Target Drones - UAS GCS

Advanced Autonomous UAV Platforms for Wide Area Actionable UAS Intelligence

High-Performance Autonomous Drones for Mission-Critical Civilian & Military Applications

GNSS Positioning & Navigation Systems, Mobile Mapping UAV LiDAR & Unmanned Surface Vehicles

Autonomous UAS, Research & Inspection UAVs for Industrial Inspection, Survey & Mapping

Professional Drones, Quadcopters, Multirotors & Hexacopters for Cinematography, Survey & Inspection
If you design, build or supply Quadcopter Drones, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Professional quadcopters, also known as quadrotors or quadrotor drones, are unmanned aerial vehicles (UAVs) configured with four rotors arranged in an “X” pattern. They provide vertical takeoff and landing (VTOL), stable hover, and responsive maneuverability, making them highly effective in environments that require precision and control.
These platforms have advanced flight controllers integrating GNSS, inertial measurement units (IMUs), and electronic speed controllers (ESCs) to ensure accurate positioning and autonomous flight. High-performance payloads such as imaging sensors, LiDAR systems, or multispectral cameras are typically mounted on stabilized gimbals, enabling professional quadcopters to perform demanding tasks including aerial surveillance, infrastructure inspection, geospatial mapping, and cinematic production.

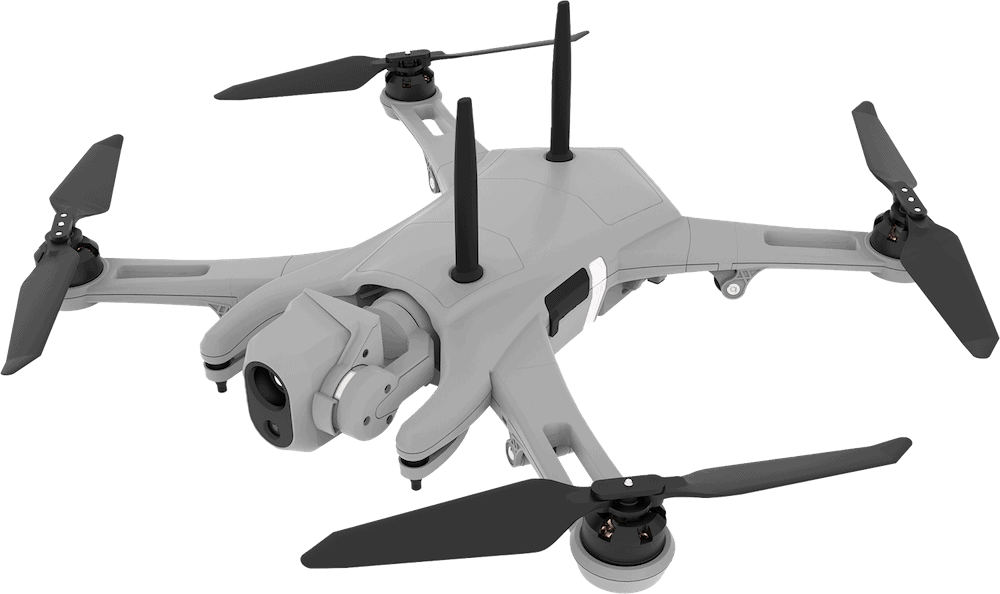
Military quadcopter drone for reconnaissance missions from Teal, a Red Cat company.
Quadcopters are indispensable in modern military operations, supporting reconnaissance, surveillance, and forward observation. Tactical drones are used in denied environments where human access is limited or unsafe. Features include VTOL, night vision, thermal imaging, real-time encrypted video transmission, and autonomous route planning. Military quadcopters support battlefield situational awareness, perimeter defense, and rapid deployment for mission-critical ISR.
Police and emergency response teams utilize quadcopters for crowd surveillance, traffic management, suspect tracking, and post-disaster assessment. VTOL and hover capabilities enable them to maintain visual on dynamic situations without interference. Firefighting UAVs assess fire spread and structural integrity, while SAR quadcopters are deployed in inaccessible terrain with infrared cameras to locate individuals.
Utility companies, oil and gas providers, and infrastructure managers deploy industrial-grade quadcopters to monitor bridges, pipelines, railways, and transmission lines. These inspections, traditionally hazardous and time-consuming, are now carried out remotely with quadcopters equipped with LiDAR, zoom cameras, and ultrasonic NDT sensors. VTOL enables rapid repositioning between inspection points without requiring a runway or launch apparatus.
Quadcopters have become essential tools in professional and commercial aerial photography. Equipped with high-resolution or full-frame cameras, these UAVs provide still images for industries including real estate, tourism, environmental documentation, and construction. Aerial photographers use quadcopters to capture inaccessible angles, orthophotos, and high-altitude perspectives with consistent framing and stability. Applications also include landscape photography, architectural documentation, and marketing campaigns.
In filmmaking and media, quadcopters support complex aerial shots that would otherwise require helicopters or cranes. Professional quadcopters carry cinema-grade cameras stabilized on gimbals, enabling smooth footage even during dynamic maneuvers. Features include programmable flight paths, follow-me modes, and FPV systems for live direction. Quadcopters are widely used in film, television, and live event broadcasting.
In agriculture, quadcopters are used for crop health monitoring, irrigation planning, and pesticide application. Precision agriculture drones leverage multispectral and hyperspectral imaging to provide data on soil conditions, pest presence, and yield forecasts. Environmental agencies use quadcopters to observe deforestation, track wildlife, assess flood zones, and measure air or water quality in remote regions.
VTOL-enabled quadcopters equipped with photogrammetry software and RTK/PPP systems offer highly accurate terrain and structure models. Used by civil engineers, mining operations, and urban developers, these UAVs conduct topographical surveys, calculate earthwork volumes, and validate construction progress. Dual-frequency GNSS receivers enhance spatial accuracy for centimeter-level positioning.
Emerging quadcopter designs support payload delivery and short-range cargo transport. Delivery drones serve in disaster relief and remote resupply missions, carrying critical supplies such as medicine or equipment. They feature load-stabilized platforms, redundant navigation systems, and obstacle avoidance sensors. Applications also include humanitarian aid and military resupply in contested areas.

Quadcopter drone from Beyond Vision.
Used by military and special forces for stealth ISR and reconnaissance. Typically lightweight with quiet propulsion systems, encrypted data links, and compatibility with tactical control systems.
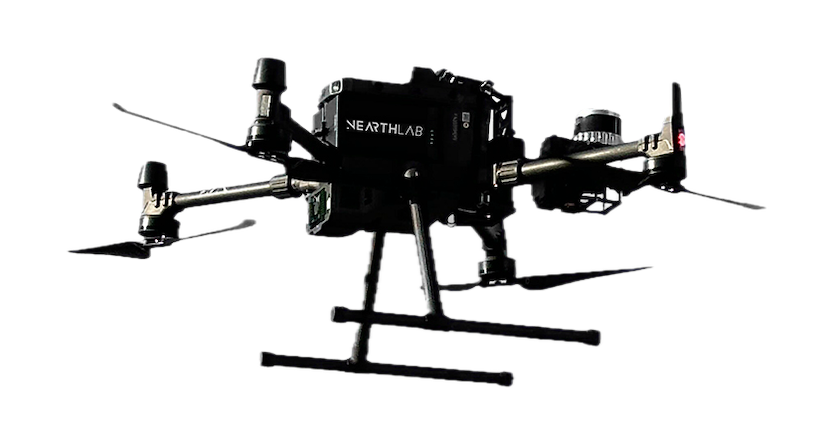
Engineered for high durability and harsh environments, inspection quadcopters are outfitted with interchangeable payloads, extended battery life, and collision avoidance. Common in energy, telecommunications, and transportation sectors.
Feature stabilized gimbal mounts, high-resolution cameras, and cinematic flight profiles. Support raw video output, ND filter integration, and live broadcast feeds.
Purpose-built for crop spraying, terrain mapping, and multispectral imaging. Carry payloads such as liquid tanks or sampling devices and support autonomous route execution.
Serve a broad range of businesses from construction firms to real estate. Emphasize flexibility, ease of use, and integration with cloud-based data platforms.
Quadcopters vs Fixed-Wing UAVs: Quadcopters are superior for confined spaces and vertical flight. Fixed-wing drones excel in range and endurance.
Quadcopters vs Hybrid VTOL Aircraft: Hybrid VTOL UAVs combine the range of fixed wings with VTOL capability, but are more complex and less agile.
Quadcopters vs Hexacopters/Octocopters: Larger rotor count increases redundancy and lift but reduces simplicity and portability.

Quadcopters for industrial inspection by Black Swift Technologies.
When selecting a quadcopter for professional or mission-critical use, important factors include:
Quadcopters remain the dominant platform for UAV operations due to their balance of cost, capability, and versatility. As technology advances, they will continue to push boundaries in automation, intelligence, and aerial access.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.