Showcase your capabilities
If you design, build or supply RTK GNSS, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




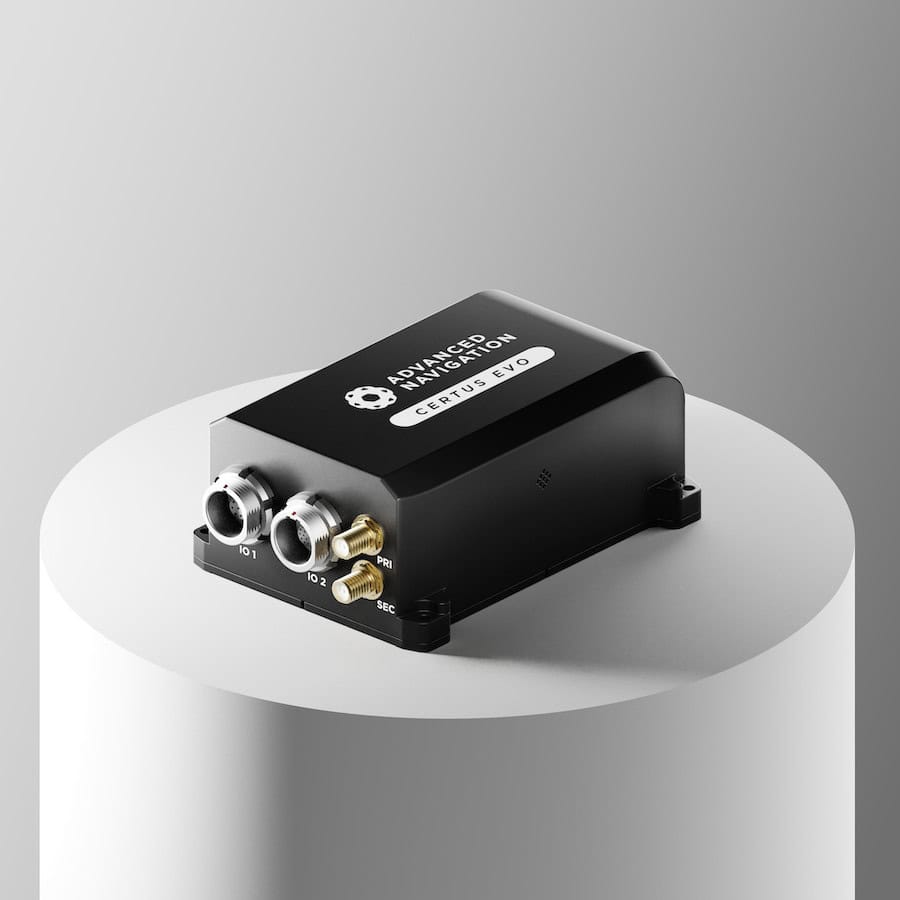
RTK GNSS modules and receivers provide centimeter-level positioning for unmanned vehicles across air, land, and sea. Discover RTK GNSS hardware, antennas, and base stations from multiple suppliers and manufacturers, supporting integration into drones, robotics, and autonomous systems.
Read the Technology Overview
High-Accuracy Navigation & Positioning Solutions for Unmanned & Autonomous Vehicles


Inertial Navigation Sensors: MEMS IMU, Accelerometers, Gyroscopes, AHRS, GPS-INS & Point Cloud Generation

Precise Positioning for Unmanned Vehicles: GPS & GNSS Receivers, Antennas & Inertial Systems


High-Performance GNSS/RTK/GPS PNT Solutions for Drone & Robotics OEMs & Systems Integrators

Innovative Drone Autopilots, Navigation Systems, and Other Hardware Peripherals & Accessories for UAVs

High-Precision GNSS Antennas: Assured Autonomy & Positioning for Unmanned Systems
GNSS Positioning Systems, 3D SLAM & Mobile Mapping, Unmanned Surface Vehicles

Professional UAV Components & Sensors: Drone Flight Controllers, GNSS Modules, Telemetry Solutions

Centimeter-Level Positioning and RTK Corrections for UAVs, Robotics and GNSS Systems

Cutting-Edge Flight Controllers, Sensors, and Other Electronics Technologies for Drones & Robotics

GNSS Positioning & Navigation Systems, Mobile Mapping UAV LiDAR & Unmanned Surface Vehicles
If you design, build or supply RTK GNSS, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

RTK GNSS (Real-Time Kinematic Global Navigation Satellite System) hardware provides the positioning backbone for modern unmanned systems. These solutions use carrier-phase measurements and add differential corrections to significantly reduce GNSS positioning errors, delivering real-time, centimeter-level accuracy. Integration of RTK GNSS modules, GNSS receivers, and antennas into drones and robotics enhances situational awareness, automated navigation, and mission reliability across both commercial and defense environments.
RTK GNSS components are available in modular, compact, and ruggedized designs suited to unmanned aerial, ground, and surface platforms. They support standardized protocols such as NMEA and RTCM for interoperability, while advanced units meet environmental and durability standards, including MIL-STD-810 and IP-rated protection for harsh operational environments.

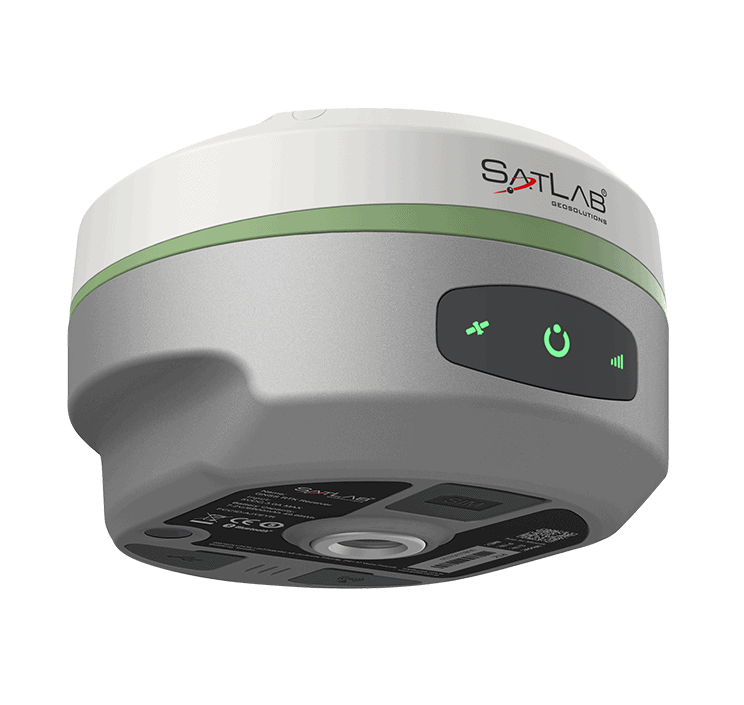
Oscar RTK GNSS Receiver by Tersus GNSS.
RTK operates by receiving GNSS (Global Navigation Satellite System) satellite signals from multiple constellations, typically GPS, GLONASS, Galileo, and BeiDou, and applying correction data transmitted from a known base station or network reference station. This process compensates for satellite orbit errors, ionospheric and tropospheric delays, and receiver clock offsets.
By leveraging differential corrections, RTK systems achieve centimeter-level positional accuracy in real time, outperforming standalone GNSS solutions. The system typically consists of a base station that provides RTK corrections and a rover unit integrated into an unmanned vehicle or robotic system.
Modern RTK GNSS modules also support multi-frequency and multi-constellation tracking, reducing signal latency and improving positioning reliability in challenging environments such as urban canyons, forests, or maritime conditions.
RTK GNSS hardware for unmanned systems includes various components designed for integration flexibility and system performance.
Compact RTK modules integrate signal processing and correction management capabilities into small form factors ideal for UAVs, UGVs, and embedded robotic systems. Many support UART, USB, and CAN interfaces for system-level integration and data output in standardized NMEA message formats.
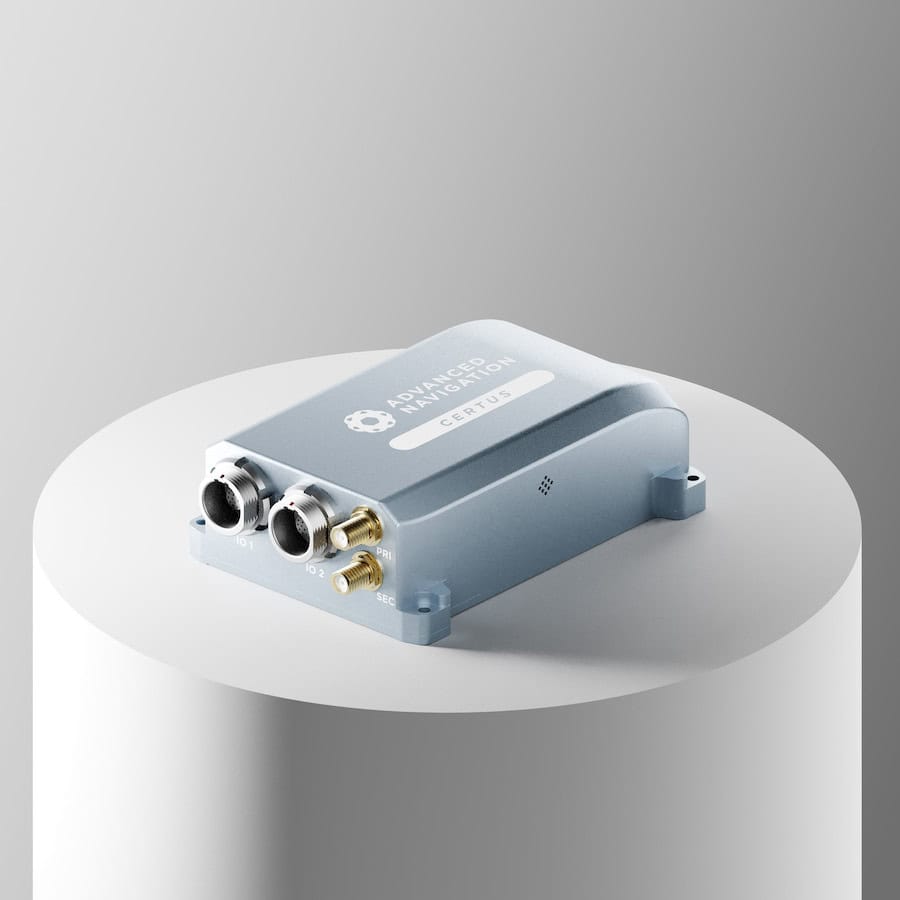
Receivers serve as the processing core of RTK systems, converting raw satellite data and correction inputs into precise position, velocity, and timing (PVT) outputs. Commercial receivers for unmanned platforms offer low power consumption, configurable update rates up to 20 Hz or higher, and compatibility with NTRIP correction streams.
A base station transmits real-time correction data via radio modem, cellular, or internet links (NTRIP). Portable or fixed installations can serve single-site missions or form part of wider RTK network services. Some manufacturers provide cloud-based correction subscriptions for wide-area coverage.
High-gain, low-multipath GNSS antennas are critical for accuracy. Dual-frequency or multi-frequency antennas improve signal robustness, while dual-antenna setups allow heading determination for navigation and orientation applications in autonomous systems. UAV GNSS antennas designed specifically for aerial platforms must also address vibration resistance, weight optimization, and aerodynamic integration requirements.
Integrated RTK and inertial measurement unit (IMU) systems combine GNSS positioning with inertial navigation data to maintain accuracy during signal interruptions, such as beneath bridges or in dense urban areas. These hybrid modules are increasingly common in high-end unmanned vehicle designs.
RTK GNSS technology supports precision positioning across a wide spectrum of unmanned system applications:

H-RTK Unicore UM982 Dual-Antenna RTK GNSS Module by Holybro.
RTK GNSS modules are engineered for seamless integration into the control and navigation architectures of unmanned vehicles. They typically communicate with onboard autopilot or flight control systems via serial, CAN, or Ethernet interfaces. Many modules also support direct connection to embedded computers running Linux or real-time operating systems for mission planning and control.
For aerial survey platforms, RTK data enhances flight stability and waypoint precision during automated missions. In ground and surface vehicles, RTK positioning enables precise trajectory control and route repetition. Synchronization with payload sensors such as LiDAR, cameras, and radar systems further improves data accuracy and alignment.
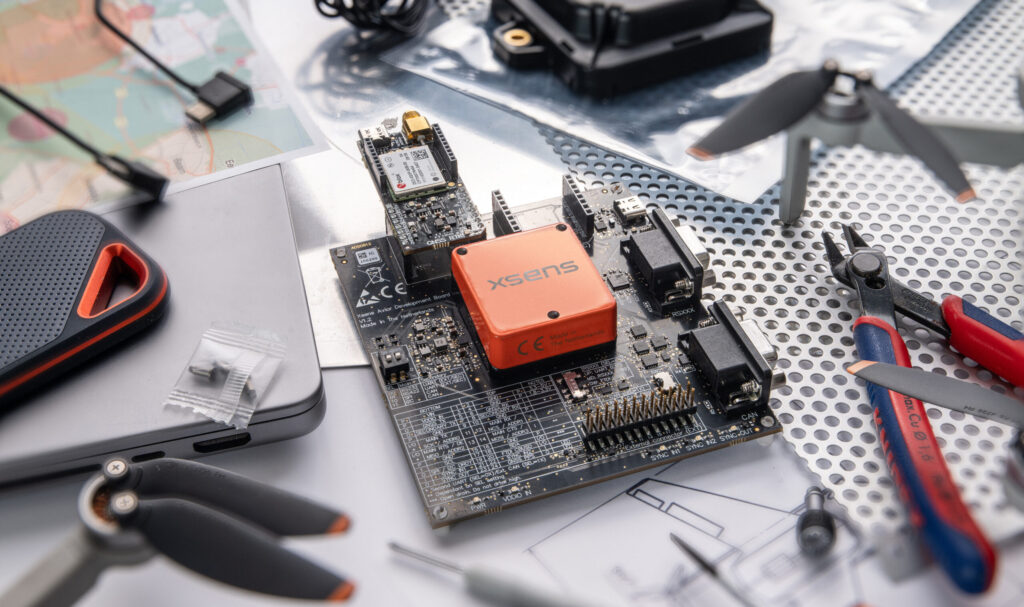
OEM RTK modules are available with development kits and evaluation boards, allowing rapid prototyping and validation. Modular architectures permit integration flexibility across various vehicle form factors, from small drones (SUAS) to heavy-duty autonomous haulers.
RTK systems rely on GNSS correction data transmission from a base or network reference source. Common communication methods include:
Protocols such as RTCM 3.x and NMEA 0183/2000 ensure interoperability between manufacturers and systems. Advanced correction services now employ authenticated data encryption to protect against spoofing and interference.
RTK GNSS hardware designed for unmanned systems typically conforms to several international and industry-specific standards:
Conformance with these standards ensures reliable operation, interoperability, and safety in diverse mission profiles.
Unmanned vehicle manufacturers can select from various RTK GNSS configurations:

OEM & IP-rated RTK GNSS antennas by GNSS.Store.
RTK GNSS adoption continues to grow across commercial and industrial unmanned applications. Advances in chipset design, antenna miniaturization, and multi-frequency processing have reduced latency and cost while improving reliability. Integrating artificial intelligence and sensor fusion systems further enhances situational awareness for autonomous vehicles.
Emerging technologies, including cloud-based RTK corrections, 5G data backhaul, and secure NTRIP streaming, enable real-time navigation even in challenging or remote environments. The availability of affordable, high-precision GNSS receivers is expanding RTK use into logistics, agriculture, construction, and inspection sectors, alongside defense and research programs.
When selecting RTK GNSS hardware for integration into unmanned systems, engineers and procurement teams should consider:
Selecting hardware with proven interoperability and compliance ensures precise, repeatable performance in critical autonomous operations.
RTK GNSS technology continues to advance the accuracy and reliability of unmanned and robotic systems worldwide. By enabling true centimeter-level positioning, RTK GNSS modules, receivers, and antennas form a core element of mission-critical navigation, mapping, and automation systems across air, land, and sea platforms.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.