Showcase your capabilities
If you design, build or supply RTK Drones, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




RTK drones are UAV platforms equipped with real-time kinematic GNSS positioning to support centimeter-level geospatial data capture during flight. These systems use correction data from a base station or network RTK service to improve the accuracy of mapping, surveying, inspection, agriculture, construction, mining, and environmental monitoring workflows.
This page features RTK drone manufacturers and suppliers integrating GNSS receivers, antennas, payload interfaces, and correction links for high-precision aerial data collection.
Read the Technology Overview

Multi-Constellation GNSS Module for Ultra-Reliable Positioning & Navigation

Fully Autonomous Multirotor Drones & Hybrid VTOL UAVs With AI Capabilities

Advanced Autonomous UAV Platforms for Wide Area Actionable UAS Intelligence

Versatile Fixed-Wing & VTOL Unmanned Aerial Vehicles (UAVs) for Long-Range Civilian, Commercial & Military Applications

Fixed Wing VTOL UAV for Autonomous Mapping, Surveillance, Inspection and Cargo Applications

GNSS Positioning & Navigation Systems, Mobile Mapping UAV LiDAR & Unmanned Surface Vehicles
If you design, build or supply RTK Drones, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Real-time kinematic (RTK) drones represent a major advancement in the capture of accurately georeferenced data. Standard GNSS positioning may provide sufficient accuracy for routine flight navigation, but surveying, mapping, and engineering applications can require centimeter-level positioning. An RTK-enabled drone achieves this accuracy by combining carrier-phase GNSS measurements with real-time correction data from a known reference station or correction network. The system typically includes a rover receiver onboard the aircraft and a communications link through which correction data is received. By accounting for common GNSS errors, RTK positioning allows sensor measurements and captured imagery to be associated with highly accurate geographic coordinates.
In the commercial and defense UAV sectors, real-time kinematic positioning is frequently compared with post-processed kinematic (PPK) positioning. Both methods use carrier-phase GNSS observations and reference data, but their workflows differ. A drone with RTK receives and processes correction data during flight, providing an accurate real-time position solution that can support immediate data-quality checks and other precision operations. A PPK drone records raw GNSS observations onboard, which are combined with data from a base station or reference network after the flight to calculate a precise aircraft trajectory. PPK therefore reduces dependence on a continuous correction link, although operators must complete an additional post-processing stage.
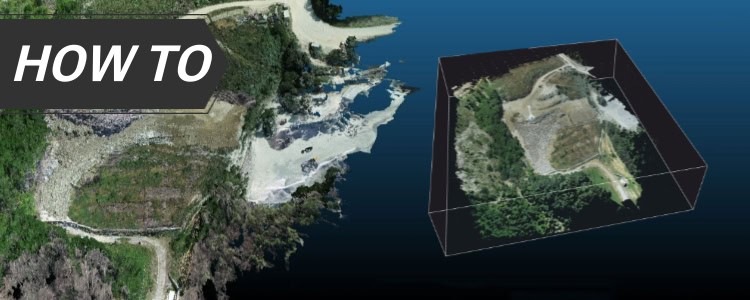
Deploying an RTK survey drone redefines the economics of aerial data collection. By anchoring imaging or LiDAR payloads to an ultra-precise spatial framework, an RTK mapping drone generates detailed digital terrain models with minimal reliance on dense ground control point networks. Survey crews can utilize just a few independent checkpoints to validate the final dataset, accelerating field timelines and reducing exposure to hazardous environments.
Construction corridors and open-pit mining operations demand frequent volume and progress assessments. Utilizing a drone with RTK GPS allows engineering teams to execute repeatable flights that map stockpiles, verify cut-and-fill balances, and monitor earthworks against design surfaces. This consistent positioning across multi-temporal change analysis helps ensure that observed variations represent true site modifications rather than sensor drift.
In precision agriculture, an RTK GNSS drone provides the high-accuracy spatial alignment required to turn multispectral and hyperspectral imagery into actionable management zones. These high-precision aerial maps align with tractor guidance lines, automated spraying systems, and variable-rate prescription grids. The spatial repeatability of drones with RTK ensures individual crop rows are monitored consistently throughout the growing season to isolate actual biological trends.
Linear asset networks require long-range mapping workflows that maintain geometric accuracy across extensive distances. RTK-enabled aerial mapping drones help reduce georeferencing errors and geometric distortion that can compromise standard drone data, making outputs directly compatible with enterprise GIS and CAD systems. This improved georeferencing supports accurate corridor mapping near roads, railways, bridges, utilities, powerlines, pipelines, and other linear assets, although multipath, obstruction, electromagnetic interference, and compass disturbance may still need to be managed during mission planning.
Environmental scientists leverage RTK drones to document highly sensitive habitats where physical foot access must be minimized to prevent ecological disruption. Whether quantifying coastal erosion, tracking riverbank degradation, or mapping invasive species, an RTK drone mapping workflow provides a rigorous data baseline. This accurate referencing allows researchers to reliably separate minor natural fluctuations from systematic environmental trends over multi-year observation periods.
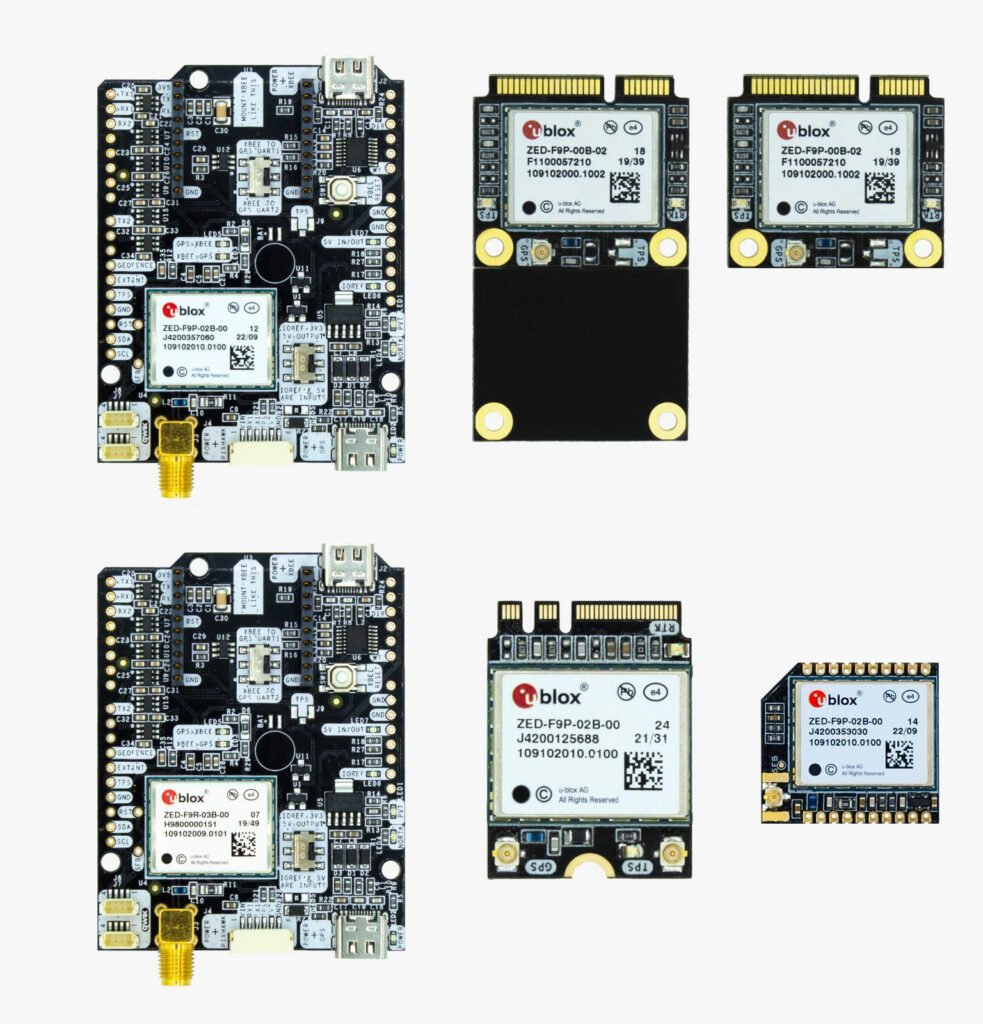
The foundational component of a high-precision UAV RTK system is the onboard multi-frequency, multi-constellation GNSS receiver. Professional systems track multiple signals, such as L1, L2, and L5, across GPS, GLONASS, Galileo, and BeiDou networks. This multi-frequency capability allows the receiver to rapidly resolve carrier-phase ambiguities to achieve a fixed status, delivering centimeter-level positioning once a fixed solution is achieved, rather than relying on a lower-precision float solution.
The performance of an RTK UAV relies heavily on antenna design and physical airframe integration. High-tier platforms utilize antennas optimized for multipath rejection, preventing reflected signals from nearby structures from introducing positioning errors. The antenna must maintain a clear view of the sky and be physically isolated from electromagnetic interference, while the lever-arm offset to the sensor must be precisely measured.
A precision receiver requires tight hardware-level integration with the main flight controller and payload trigger mechanisms. Whenever a camera shutter fires or a LiDAR measurement is recorded, the event should be precisely timestamped against a GNSS-synchronized time base. This clock synchronization reduces latency errors caused by aircraft motion, helping ensure high-speed flight does not introduce spatial discrepancies into the metadata.
An RTK system requires an external reference source to generate and broadcast differential corrections. This is achieved using a local physical base station set up over a known coordinate point, or via network RTK using the NTRIP protocol over an internet link, often cellular. Because any initial reference point error propagates directly into the drone’s final deliverables, the absolute accuracy of the dataset is bounded by the reference station coordinates.
Selecting the appropriate sensor payload is critical to maximizing the positioning capabilities of a high-precision RTK drone platform.
| Payload Type | Core Technical Capability | Primary Value in an RTK Workflow |
| RGB mapping cameras | High-resolution visible-light imaging using global shutters or calibrated mechanical shutter systems. | Direct georeferencing pins precise coordinates to image metadata, minimizing ground control. |
| LiDAR scanners | Active laser pulses recording multi-return 3D point clouds through vegetation. | RTK drone surveys demand a tightly coupled RTK and IMU trajectory to calculate precise 3D laser return points. |
| Multispectral and hyperspectral sensors | Captures narrow wavebands across the spectrum, including near-infrared. | Ensures pixel-to-pixel alignment across temporal flights for precise trend analysis. |
| Thermal imaging payloads | Measures long-wave infrared radiation to map temperature differentials. | Geolocates structural and electrical anomalies for direct import into asset databases. |
| Oblique cameras and 3D reconstruction payloads | Multi-camera arrays pointing at angled perspectives for vertical surfaces. | Provides spatial anchoring to generate accurate 3D digital twins with reduced geometric drift. |
| Bathymetric and coastal survey payloads | Green-spectrum lasers or depth-optimized sensors for subsea environments. | Aligns nearshore topo-bathy data with terrestrial datums and hydrographic tidal models. |
Integrating these diverse sensors with centimeter-level positioning helps ensure that data outputs meet stringent industrial standards across various engineering fields.
Executing a professional aerial survey requires a structured data acquisition and processing sequence to support data integrity.
Following this rigorous sequence helps ensure that the resulting spatial products can be confidently utilized for engineering-grade design and analysis.
The landscape of high-precision aerial positioning continues to evolve with advancements in hardware intelligence and global data networks.
These technological shifts are driving the industry toward increasingly automated, high-accuracy spatial intelligence networks.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.