Underwater Navigation & Subsea Positioning for ROV & AUV
Category Presented by
Underwater positioning systems and subsea navigation solutions enable ROVs and AUVs to estimate location, motion, and orientation where continuous GNSS reception is unavailable. These systems support survey, inspection, obstacle avoidance, docking, tracking, mine countermeasures, and terrain-following missions across defense and commercial applications.
This page showcases leading underwater navigation and positioning systems for reliable depth, heading, visual, and sonar data to maintain reliable state estimates during subsea operations.
If you design, build or supply Underwater Navigation and Positioning, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
USBL positioning & communication system for subsea tracking & dynamic positioning
USBL positioning & communication system for subsea tracking & dynamic positioning
... with multiple subsea assets while maintaining compatibility with Exail navigation systems and... ...aseline (USBL) positioning and communication system from Exail developed for accurate tracking,...
Cost-effective positioning capabilities for ROVs & AUVs
Cost-effective positioning capabilities for ROVs & AUVs
... Sonar’s ROV Locator (ROVL) family provides a range of cost-effective USBL positioning... ...e receiver and ROV transmitter to synchronize the clocks on each unit...
The Comprehensive Guide to Underwater Navigation & Subsea Positioning for ROV, UUV & AUV Systems
Overview by
William Mackenzie
Updated:
Introduction to Underwater Vehicle Navigation & Positioning
Underwater navigation and positioning systems allow Remotely Operated Vehicles (ROVs) and Autonomous Underwater Vehicles (AUVs) to determine location, motion, and orientation. Because submerged platforms cannot continuously receive surface Global Navigation Satellite System (GNSS) signals, their position must be estimated using combinations of inertial measurements, acoustic ranges, velocity observations, pressure depth, heading references, sonar imagery, and environmental features.
No single sensor provides a complete underwater positioning system under all operating conditions. High-capability ROV and AUV navigation systems fuse these diverse data sources into a unified state estimate while continuously monitoring each input for latency, noise, misalignment, and potential failure.
Key Systems Used for ROV & AUV Navigation & Positioning
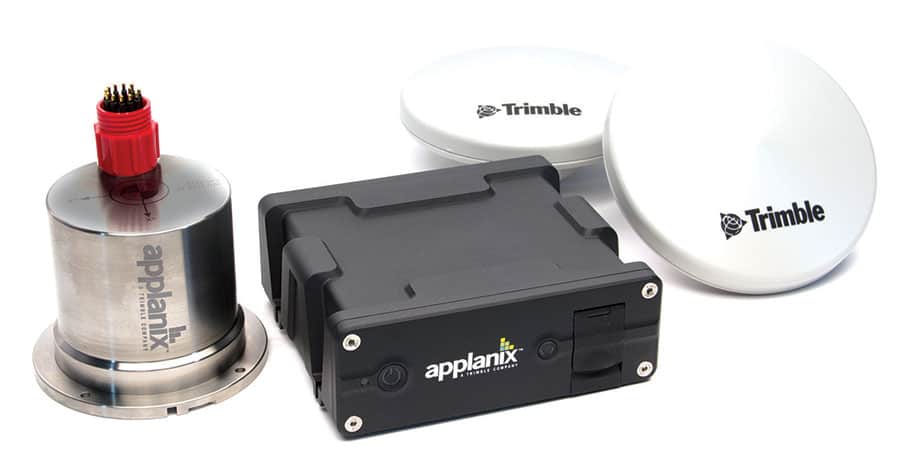
Inertial Navigation Systems
Advanced Navigation’s Subsonus USBL Underwater Positioning System
An Inertial Navigation System (INS) estimates vehicle motion using gyroscopes and accelerometers to calculate orientation, velocity, and trajectory from a known starting point. Because an INS is self-contained and operates without external transmissions, it provides continuous subsea navigation in acoustically noisy or visually degraded environments. To prevent accumulated sensor drift over time, the system relies on external updates from Doppler velocity logs, depth sensors, acoustic positioning, and surface GNSS fixes to maintain an accurate ROV positioning system or AUV navigation state.
Doppler Velocity Logs
A Doppler Velocity Log (DVL) measures three-dimensional vehicle velocity by transmitting acoustic pulses along angled beams and processing the frequency shift of returning seabed echoes. When operating in bottom-track mode, the DVL directly constrains dead-reckoning drift, making it a foundational component for subsea navigation systems. Tight integration with an INS bounds velocity error growth, though performance remains subject to sound-speed variations, vehicle altitude limits, sediment interference, and seabed lock loss.
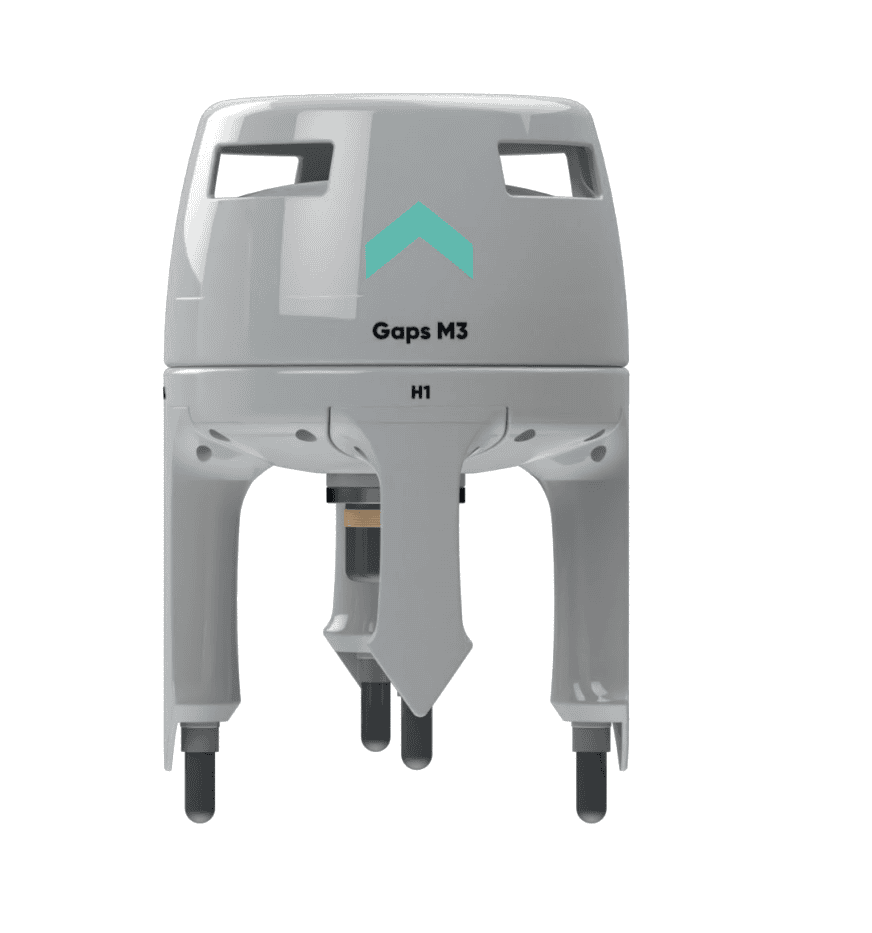
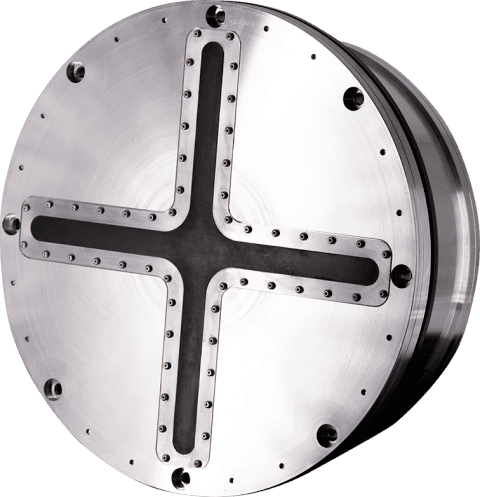
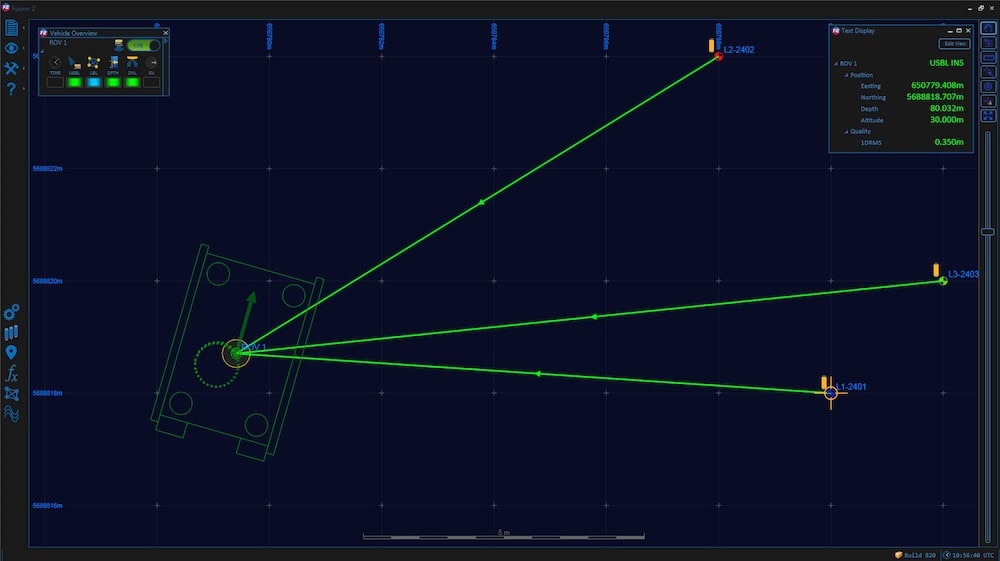
Ultra-Short Baseline Positioning Systems
An Ultra-Short Baseline (USBL) system determines subsea positioning using a compact transducer array typically deployed from a surface vessel to interrogate a vehicle-mounted transponder. Signal travel time and acoustic phase differences establish target range, bearing, and elevation relative to the surface platform. While USBL requires minimal seabed infrastructure for ROV positioning and AUV monitoring, its overall accuracy relies on surface GNSS, vessel motion compensation, precise sound-speed profiles, and slant-range geometry.
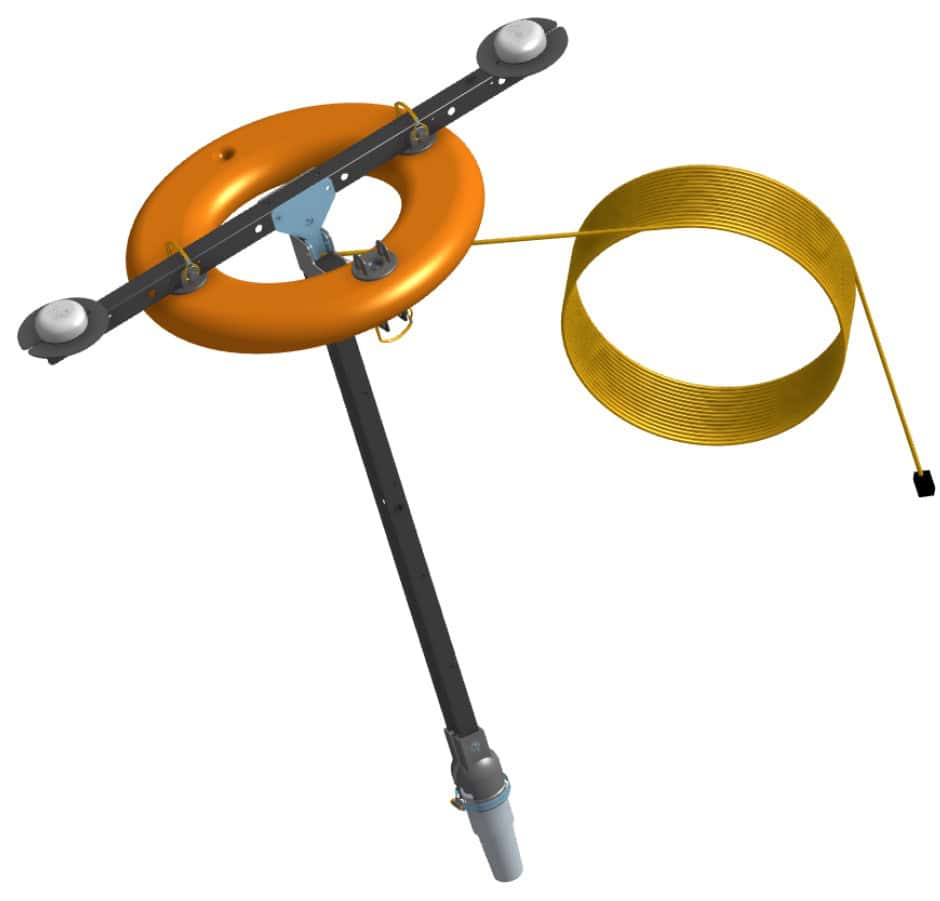
Long Baseline Positioning Systems
A Long Baseline (LBL) system calculates vehicle location through geometric trilateration using an array of calibrated acoustic transponders anchored at fixed seabed locations. By surrounding the work site, LBL delivers highly repeatable subsea positioning independent of surface vessel movement or water depth. Modern operations frequently adopt Sparse LBL, which pairs a reduced number of transponder range updates with a capable INS and DVL to maintain tight positioning bounds with lower deployment overhead.
Acoustic Pingers, Beacons and Transponders
Acoustic beacons provide detectable references for underwater tracking, navigation, and asset recovery. Free-running pingers emit periodic signals for emergency location, while interrogated transponders reply to specific acoustic codes within USBL and LBL networks, and responders trigger via wired umbilical signals. Hardware selection requires balancing operating frequency, acoustic range, transducer clear-of-frame placement, protocol compatibility, and battery endurance.
Depth and Pressure Sensors
Ramses LBL Positioning Transceiver by Exail
Hydrostatic pressure sensors provide the primary vertical reference for an underwater navigation system by measuring external fluid pressure and converting it to depth using local water density and gravity models. High-accuracy resonant quartz or piezoresistive sensors establish a rigid vertical constraint that stabilizes INS vertical channel drift. Because pressure indicates depth below the surface rather than altitude above the seabed, platforms must pair depth sensors with acoustic altimeters or DVLs for terrain-following operations.
Magnetic Compasses and Gyrocompasses
Heading accuracy directly dictates cross-track position stability in dead-reckoning subsea navigation systems. Small platforms often utilize triaxial magnetometers, though their performance is vulnerable to hard-iron and soft-iron distortions from motors, thruster currents, and steel structures. For survey-grade applications and operations near subsea infrastructure, fiber-optic gyrocompasses measure Earth rotation to provide true north orientation free from magnetic interference.
Visual Navigation and Imaging
Optical cameras capture high-resolution visual detail for close-range inspection, structural photogrammetry, automated docking, and manipulator tasks. While underwater light absorption and scattering limit optical range, visual odometry algorithms track image features across frames to estimate relative vehicle displacement in clear water.
Visual-inertial navigation fuses camera feature tracking with high-rate accelerometer and gyroscope measurements. The inertial sensors maintain state tracking during fast turns or visual dropouts, while camera observations bound inertial drift, creating a robust solution for close-range structural inspection when paired with proper port refraction modeling and tight sensor timing.
Types of Sonar Used for Underwater Navigation & Positioning
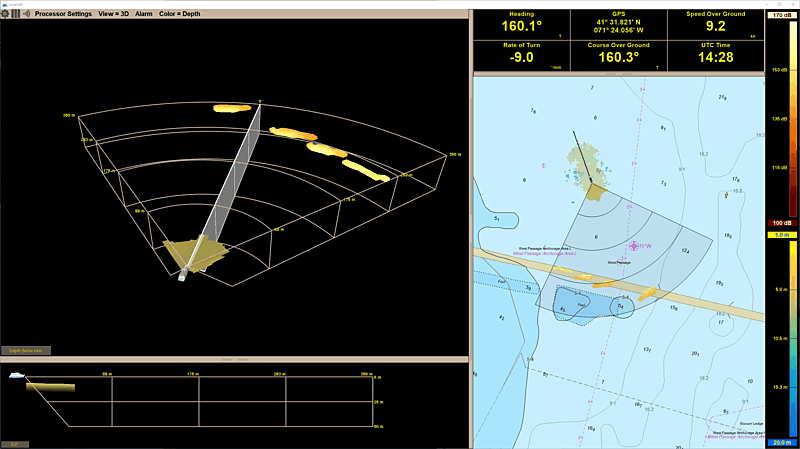
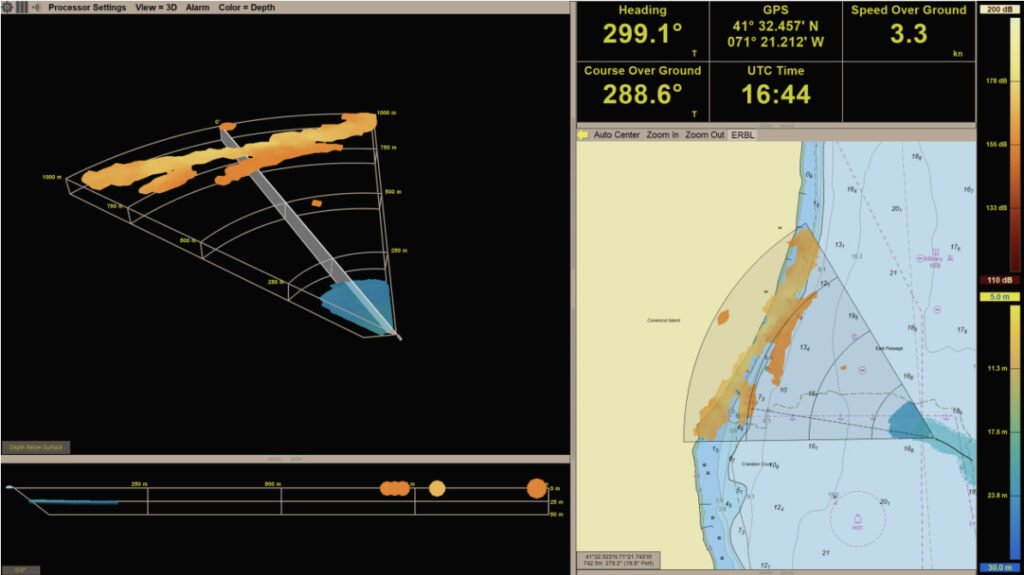
Forward-Looking Sonar
Omniscan 450 FS for ROV Positioning by Cerulean Sonar
Forward-Looking Sonar (FLS) scans the volume ahead of a vehicle to detect obstacles, terrain rises, subsea structures, and entanglements beyond optical range. Mechanical scanning units provide high angular resolution at lower data rates, whereas multibeam FLS arrays generate real-time image refresh rates essential for dynamic ROV navigation and autonomous AUV obstacle avoidance.
Imaging Sonar
Imaging sonar generates two-dimensional acoustic representations of subsea targets and surrounding structures by displaying return signal intensity. These systems assist ROV pilots operating in turbid water during asset inspections, structural approaches, and manipulator guidance. Multibeam imaging sonars deliver near-real-time frame rates that allow operators to maintain clear situational awareness while the vehicle is in motion.
Multibeam Sonar
Multibeam echosounders transmit wide acoustic swaths to capture dense bathymetric point clouds and seabed backscatter data. When integrated on an AUV or ROV, multibeam sonar collects high-resolution bathymetry close to the seabed, provided the unit is tightly coupled with precise INS attitude compensation, accurate position references, and real-time sound-speed profiles.
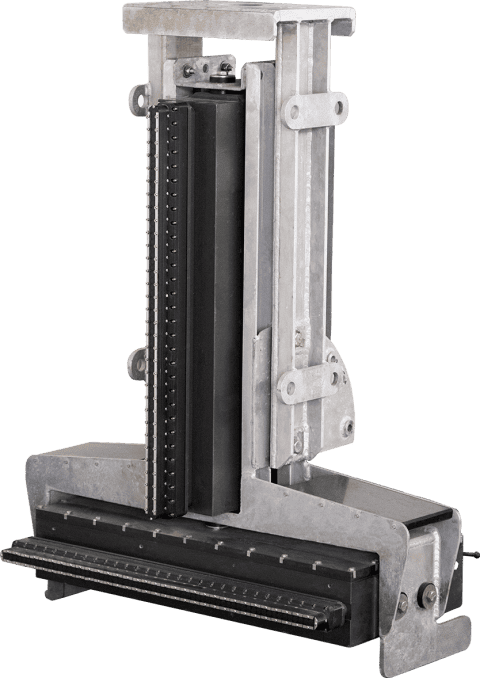
Profiling Sonar
Vigilant FLS for ROV Navigation by Forcys
Profiling sonar uses a narrow, rotating acoustic beam to capture precise cross-sectional geometric profiles of surrounding environments. By combining successive profiles with vehicle motion, these sensors map internal pipelines, flooded shafts, harbor walls, and structural scour, offering fine angular measurement without the heavy bandwidth requirements of broad multibeam systems.
Side-Scan Sonar
Side-scan sonar projects fan-shaped acoustic pulses to both sides of a vehicle, recording return intensity to build plan-view images of the seabed. Widely deployed on AUVs for pipeline route surveys, mine countermeasures, and wide-area searches, side-scan sonar requires reliable vehicle trajectory tracking and altitude control to ensure accurate spatial georeferencing.
Synthetic Aperture Sonar
Synthetic Aperture Sonar (SAS) combines coherent acoustic returns across multiple ping positions as the vehicle moves, synthesizing an array much longer than the physical transducer. This technique achieves fine, range-independent along-track resolution for wide-area target detection, but requires ultra-precise trajectory tracking provided by high-grade INS, DVL, and micronavigation processing.
Single-Beam and Altimeter Sonar
Single-beam echosounders measure direct range along one acoustic path, serving primarily as altimeters when pointed downward toward the seabed. These low-power, compact sensors provide critical altitude feedback for terrain following, automated landing routines, and depth-clearance monitoring on small AUVs and inspection ROVs.
Sub-Bottom Profilers
Sub-bottom profilers transmit low-frequency acoustic energy that penetrates sub-seabed sediment to reflect off underlying geological layers and buried infrastructure. Mounting profilers on subsea platforms brings the sensor close to the bottom, improving spatial resolution for cable burial surveys, pipeline inspection, and geohazard mapping.
Underwater Communications Supporting Navigation
Effective navigation depends on reliable communication channels to transmit position updates, telemetry, and payload data across subsea domains.
Acoustic modems and navigation data exchange: They use sound waves to send positioning fixes and state estimates over long subsea distances.
Optical underwater communications: They deliver high data rates and low latency across short, clear water distances.
Tethered Ethernet and fiber-optic links: Umbilicals supply uncompressed data feeds and continuous power to work-class ROVs.
Low-bandwidth command and position updates: Short messages transmit waypoints and position fixes while minimizing acoustic congestion.
Cooperative navigation between vehicles: Shared range data lets vehicles with basic navigation inherit accuracy from high-spec platforms.
Surface gateway buoys and relay nodes: Buoys bridge satellite communications above water with acoustic links below.
Communication latency and its effect on positioning: Slow acoustic propagation requires precise timestamping to prevent motion errors.
These complementary communication links ensure subsea platforms maintain continuous data flow and stable state estimates across all operating depths.
Sonardyne underwater positioning technology is supporting coordinated AUV operations during the BAS-led GIANT mission to study Greenland’s tidewater glaciers
Cerulean Sonar’s Omniscan FS supported successful identification of the Steinbrenner during a deepwater ROV expedition conducted in challenging Lake Superior conditions
A new technical integration combining AI-powered radar perception with FarSounder's 3D forward-looking sonar software delivers comprehensive surface and subsurface situational awareness to help mariners navigate challenging and congested marine environments
Njord Survey has selected Sonardyne SPRINT-Nav U for integration into ecoSUB AUVs to support more scalable and efficient subsea survey operations through high-accuracy navigation
FarSounder's new grant from the Rhode Island Commerce Corporation will accelerate the development of its machine-learning frameworks for automated maritime hazard classification
FarSounder integrates SEA.AI’s optical and thermal detections into SonaSoft LT, unifying surface and subsurface awareness by displaying AI classified objects alongside Argos 3D Forward Looking Sonar data
France-headquartered group equips the STAPEM Boreale with Sonardyne’s Ranger 2 technology to support precision ROV operations in Angola
Dec 02, 2025
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.